Overview of the UAV—Based Eddy Covariance Fluxes Measurements Technique
Sun Yibo,1,2, Su De,1,2, Quan Zhanjun1, Shang Haolü3, Geng Bing4, Lin Xingwen5, Jing Pingping6, Bao Yang1,2, Zhao Yanhua1,2, Yang Wei1,2
1. Institute of Environmental Ecology, State Key Laboratory of Environmental Criteria and Risk Assessment, State Environment Protection Key Laboratory of Regional Eco-Process and Function Assessment, Chinese Research Academy of Environmental Sciences, Beijing 100021, China
2. Integrated Ecological Observation and Research Station of Jinggangshan, Jinggangshan Jiangxi 343699, China
3. Key Laboratory of Digital Earth Science, Aerospace Information Research Institute, Chinese Academy of Sciences, Beijing 100094, China
4. Institute for Urban and Environment Studies, Chinese Academy of Social Sciences, Beijing 100028, China
5. College of Geography and Environment Science, Zhejiang Normal University, Jinhua Zhejiang 321004, China
6. National Ocean Technology Center, Tianjin 300112, China
Corresponding authors:Su De (1972-), male, Chifeng City, Inner Mongolia Autonomous Region, Professor. Research areas include regional ecological monitoring and assessment, and ecological planning and design. E-mail:sude@craes.org.cn
Airborne Eddy Covariance (EC) method is one of the most effective ways to measure the turbulent fluxes over regional scale directly. The turbulent fluxes from airborne EC method have the same spatial scale with the pixel scale of remote sensing image and the grid scale of land-surface models, which is very important for the simulation of regional or global land-surface fluxes. UAV-based eddy covariance method could achieve the observation of turbulent fluxes in a multi-period and multi-sorties way, and the observation result is reliable and the application is inexpensive. It is an important development direction for airborne flux observation technique. After the introduction of the main technical characteristics of the airborne EC method, this paper reviewed the worldwide progress in UAV-based fluxes measurements system from these aspects of the specifications of the UAVs, the integrated instruments, and the analysis of the application cases. Then, the main sources of uncertainty affecting the UAV-based fluxes measurements were discussed. At last, the shortcomings of the current UAV-based flux observation system were summarized. A brief outlook about UAV-based fluxes measurements technique was also given.
Sun Yibo, Su De, Quan Zhanjun, Shang Haolü, Geng Bing, Lin Xingwen, Jing Pingping, Bao Yang, Zhao Yanhua, Yang Wei. Overview of the UAV—Based Eddy Covariance Fluxes Measurements Technique. Advances in Earth Science[J], 2019, 34(8): 842-854 DOI:10.11867/j.issn.1001-8166.2019.08.0842
采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一。近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17]。借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18]。自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23]。同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广。近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动。Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测。同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力。根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等。在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例。
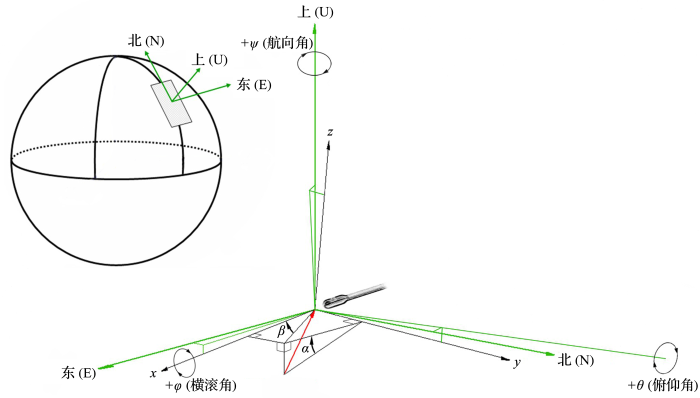
Fig.2
Diagram of coordinate transformation between turbulent probe coordinate system and Earth coordinate system
绿色代表地球坐标系统,黑色代表湍流探头坐标系统,红色矢量代表风速The blue axis represents the Earth's reference frame, green axis represents the probe's coordinate system, and the red vector indicated the wind speed
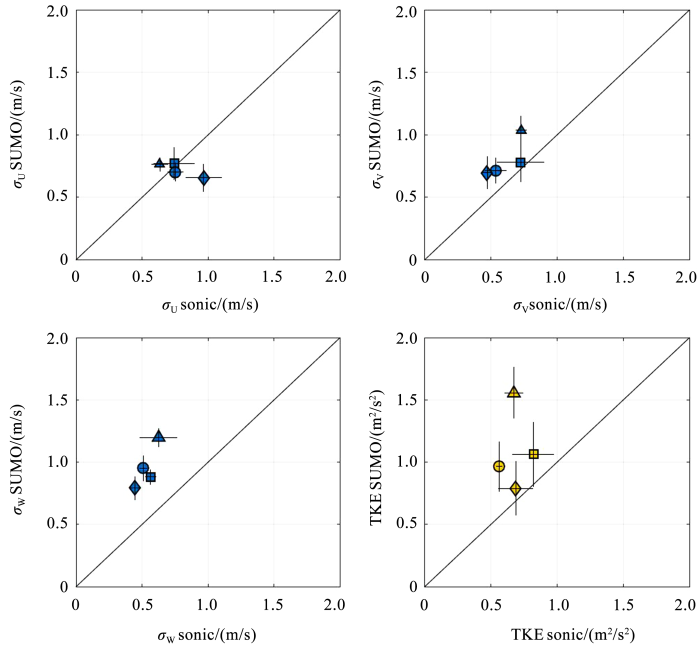
Fig.4
Averaged standard deviations of 3-dimension wind (σU,σV,σW) and averaged Turbulence Kinetic Energy (TKE) from SUMO against the observed results from sonic anemometer of the 60 m meteorological tower[43]
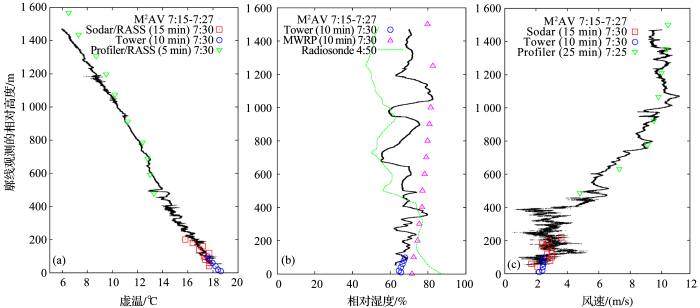
Fig.6
Vertical profiles of virtual temperature(a), relative humidity(b) and wind speed(c) measured by M2AV, sodar/RASS, wind profiler/RASS, tower, microwave radiometer profiler and radiosonde[49]
3.3 大型无人机通量观测系统
大型无人机的起飞重量一般在10 kg以上,通常能够搭载3 kg以上的观测设备,续航时间一般在2~5 h,飞行距离可达300 km,可搭载包括涡动相关观测设备在内的多种类型观测设备,实现对湍流变量、辐射以及地表参数的多要素观测。目前代表性的观测系统有UMARS2(Unmanned Modular Airborne Research System)[52],Manta[26],Manta C1[28],ScanEagle[28,53]和ALADINA(Application of Light-weight Aircraft for Detecting IN situ Aerosol)[54,55],各系统无人机的主要特征如表3所示。
Table 3
表3
表3用于涡动相关通量观测的大型无人机主要性能指标
Table 3 Specifications of large UAV used in Eddy Covariance fluxes observation
图8
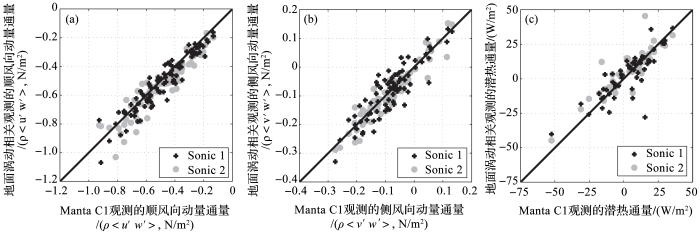
Manta C1观测的动量通量(a,b)和潜热通量(c)与2套地面涡相关设备(Sonic 1, Sonic 2)观测的对比[28]
Fig. 8
Comparison of the momentum (a, b) and latent heat (c) fluxes measured by Manta C1 with those measured by instruments of ground-based Eddy Covariance (Sonic 1, Sonic 2) during ground-vehicle-based tests[28]
Area-averaged evapotranspiration over a heterogeneous land surface: Aggregation of multi-point EC flux measurements with high-resolution land-cover map and footprint analysis
[J]. Hydrology and Earth System Sciences, 2017, 21(8): 4 037-4 051.
An analysis on the influence of spatial scales on sensible heat fluxes in the north Tibetan Plateau based on Eddy covariance and large aperture scintillometer data
[J]. Theoretical and Applied Climatology, 2016, 129(3): 965-976.
Calibration procedure and accuracy of wind and turbulence measurements with five-hole probes on fixed-wing unmanned aircraft in the atmospheric boundary layer and wind turbine wakes
ALADINA — An unmanned research aircraft for observing vertical and horizontal distributions of ultrafine particles within the atmospheric boundary layer
Optimizing window length for turbulent heat flux calculations from airborne eddy covariance measurements under near neutral to unstable atmospheric stability conditions
Area-averaged evapotranspiration over a heterogeneous land surface: Aggregation of multi-point EC flux measurements with high-resolution land-cover map and footprint analysis
An analysis on the influence of spatial scales on sensible heat fluxes in the north Tibetan Plateau based on Eddy covariance and large aperture scintillometer data
Innovative strategies for observations in the Arctic atmospheric boundary layer (ISOBAR)—The Hailuoto 2017 campaign
1
2018
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Considerations for Atmospheric Measurements with Small Unmanned Aircraft Systems
2
2018
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Fundamental turbulence measurement with unmanned aerial vehicles (invited)
1
2016
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Overview of Small Fixed-Wing Unmanned Aircraft for Meteorological Sampling
3
2015
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
... [18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
An analysis of airborne measurements of vertical water vapor flux during BOMEX
1
1972
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Marine turbulent boundary layer fluxes of water vapor, sensible heat and momentum during gate
1
1978
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Aircraft monitoring of surface carbon dioxide exchange
1
1982
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
The Sky Arrow ERA, an innovative airborne platform to monitor mass, momentum and energy exchange of ecosystems
1
2006
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Flux measurements by the NRC Twin Otter atmospheric research aircraft: 1987-2011
1
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
An unmanned aircraft vehicle system for boundary-layer flux measurements over forest canopies
1
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
1
1994
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Measuring the wind vector using the autonomous mini aerial vehicle M2AV
3
2008
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Measurement of turbulent water vapor fluxes using a lightweight unmanned aerial vehicle system
3
2012
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
... 大型无人机的起飞重量一般在10 kg以上,通常能够搭载3 kg以上的观测设备,续航时间一般在2~5 h,飞行距离可达300 km,可搭载包括涡动相关观测设备在内的多种类型观测设备,实现对湍流变量、辐射以及地表参数的多要素观测.目前代表性的观测系统有UMARS2(Unmanned Modular Airborne Research System)[52],Manta[26],Manta C1[28],ScanEagle[28,53]和ALADINA(Application of Light-weight Aircraft for Detecting IN situ Aerosol)[54,55],各系统无人机的主要特征如表3所示. ...
Development and testing of instrumentation for UAV-Based flux measurements within terrestrial and marine atmospheric boundary layers
3
2013
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
... [27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Lightweight unmanned aerial vehicles will revolutionize spatial ecology
9
2013
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
... 大型无人机的起飞重量一般在10 kg以上,通常能够搭载3 kg以上的观测设备,续航时间一般在2~5 h,飞行距离可达300 km,可搭载包括涡动相关观测设备在内的多种类型观测设备,实现对湍流变量、辐射以及地表参数的多要素观测.目前代表性的观测系统有UMARS2(Unmanned Modular Airborne Research System)[52],Manta[26],Manta C1[28],ScanEagle[28,53]和ALADINA(Application of Light-weight Aircraft for Detecting IN situ Aerosol)[54,55],各系统无人机的主要特征如表3所示. ...
... [28,53]和ALADINA(Application of Light-weight Aircraft for Detecting IN situ Aerosol)[54,55],各系统无人机的主要特征如表3所示. ...
... [28]<strong>Comparison of the momentum </strong>(<strong>a</strong>,<strong> b</strong>)<strong> and latent heat </strong>(<strong>c</strong>)<strong> fluxes measured by Manta C1 with those measured by instruments of ground-based Eddy Covariance </strong>(<strong>Sonic 1</strong>,<strong> Sonic 2</strong>)<strong> during ground-vehicle-based tests</strong><sup>[<xref ref-type="bibr" rid="R28">28</xref>]</sup>Fig. 84 无人机涡动相关方法的主要不确定性来源<strong>4.1</strong> 风速测量的不确定性
Exploring the potential of the RPA system SUMO for multipurpose boundary-layer missions during the BLLAST campaign
1
2016
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Measurement of turbulent water vapor fluxes using a lightweight unmanned aerial vehicle system
1
2012
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
The BLLAST field experiment: Boundary-Layer late afternoon and sunset turbulence
1
2014
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Warming trends in Asia amplified by brown cloud solar absorption
1
2007
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Study of Airborne Eddy Covariance Regional Turbulent Water and Heat Fluxes Measurements Methods
1
2018
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
机载涡动相关区域湍流水热通量观测方法研究
1
2018
... 采用无人机搭载涡动相关仪器进行通量观测是解决目前区域尺度地表通量观测困难的有效途径之一.近年来,随着无人机技术的快速发展以及轻小型、高精度、快速响应涡动相关仪器的出现,基于无人机的通量观测技术越来越多地被人们所采用[15,16,17].借助无人机灵活、低成本、易实施、安全性高等优点,无人机涡动相关方法能够实现对地表通量的多时段、多架次以及多区域的灵活观测,是传统有人驾驶飞行器通量观测技术的有效补充[18].自20世纪70年代机载通量观测技术被提出以来[19,20,21],经过近50年的发展,目前以SkyArrow 650 ERA(Environmental Research Aircraft)为代表的有人驾驶飞行器通量观测技术已经成熟并实现了商业化应用[22,23].同时伴随着无人驾驶技术的发展,基于无人机的通量观测方法于20世纪90年代就被提出[24],但早期的无人机通量观测技术沿用了有人驾驶飞行器的方式,观测系统结构庞大,难以推广.近年来,随着无人机技术的快速发展以及传感器轻小型化的发展趋势,以van den Kroonenberg等[25]集成的M2AV(Meteorological mini UAV)小型气象观测无人机为代表的无人机通量观测系统开始逐渐被人们采用,但限于无人机有限的荷载能力,可观测的变量仅包括三维风速和大气温度脉动.Thomas等[26]采用高性能高荷载无人机Manta作为通量观测平台并集成高响应的水汽浓度观测设备,用于对湍流潜热通量进行观测.同期,Reineman等[27]集成了Manta C1及ScanEagle无人机通量观测平台并搭载了更多类型的观测设备,对大气风速、温度脉动、水汽浓度脉动进行观测,并同时测量大气辐射、地表/海面温度等信息,观测能力及性能与传统有人驾驶飞行器相当,表现出了无人机通量观测技术的巨大潜力.根据无人机的载荷不同,目前国外已有了大型、中型、轻型多种类型的无人机通量观测系统[18,28],对无人机通量观测的有效性也进行了大量的验证工作[27,29,30]并在多个野外观测实验中得到了广泛应用,例如BLLAST(Boundary Layer Late Afternoon and Sunset Turbulence)[31]、MAC(Maldives Autonomous unmanned aerial vehicle Campaign)[32]、CLOUD-MAP(Collaboration Leading Operational UAS Development for Meteorology and Atmospheric Physics)[16]等.在我国,由于早期传感器技术发展较为滞后,对机载通量观测技术的研究开展的相对较晚[33],目前还没有无人机通量观测系统的集成及应用的案例. ...
Calibration and quality assurance of flux observations from a small research aircraft
Calibration procedure and accuracy of wind and turbulence measurements with five-hole probes on fixed-wing unmanned aircraft in the atmospheric boundary layer and wind turbine wakes
... [43]<strong>Averaged standard deviations of 3-dimension wind </strong>(<strong><i>σ</i><sub>U</sub></strong>,<strong><i>σ</i><sub>V</sub></strong>,<strong><i>σ</i><sub>W</sub></strong>)<strong> and averaged Turbulence Kinetic Energy </strong>(<strong>TKE</strong>)<strong> from SUMO against the observed results from sonic anemometer of the 60 m meteorological tower</strong><sup>[<xref ref-type="bibr" rid="R43">43</xref>]</sup>Fig.4<strong>3.2</strong> 中型无人机通量观测系统
... [49]<strong>Vertical profiles of virtual temperature</strong>(<strong>a</strong>),<strong> relative humidity</strong>(<strong>b</strong>)<strong> and wind speed</strong>(<strong>c</strong>)<strong> measured by M<sup>2</sup>AV</strong>,<strong> sodar/RASS</strong>,<strong> wind profiler/RASS</strong>,<strong> tower</strong>,<strong> microwave radiometer profiler and radiosonde</strong><sup>[<xref ref-type="bibr" rid="R49">49</xref>]</sup>Fig.6<strong>3.3</strong> 大型无人机通量观测系统
大型无人机的起飞重量一般在10 kg以上,通常能够搭载3 kg以上的观测设备,续航时间一般在2~5 h,飞行距离可达300 km,可搭载包括涡动相关观测设备在内的多种类型观测设备,实现对湍流变量、辐射以及地表参数的多要素观测.目前代表性的观测系统有UMARS2(Unmanned Modular Airborne Research System)[52],Manta[26],Manta C1[28],ScanEagle[28,53]和ALADINA(Application of Light-weight Aircraft for Detecting IN situ Aerosol)[54,55],各系统无人机的主要特征如表3所示. ...
... [49]Fig.6<strong>3.3</strong> 大型无人机通量观测系统
大型无人机的起飞重量一般在10 kg以上,通常能够搭载3 kg以上的观测设备,续航时间一般在2~5 h,飞行距离可达300 km,可搭载包括涡动相关观测设备在内的多种类型观测设备,实现对湍流变量、辐射以及地表参数的多要素观测.目前代表性的观测系统有UMARS2(Unmanned Modular Airborne Research System)[52],Manta[26],Manta C1[28],ScanEagle[28,53]和ALADINA(Application of Light-weight Aircraft for Detecting IN situ Aerosol)[54,55],各系统无人机的主要特征如表3所示. ...
A study of local turbulence and anisotropy during the afternoon and evening transition with an unmanned aerial system and mesoscale simulation
... 大型无人机的起飞重量一般在10 kg以上,通常能够搭载3 kg以上的观测设备,续航时间一般在2~5 h,飞行距离可达300 km,可搭载包括涡动相关观测设备在内的多种类型观测设备,实现对湍流变量、辐射以及地表参数的多要素观测.目前代表性的观测系统有UMARS2(Unmanned Modular Airborne Research System)[52],Manta[26],Manta C1[28],ScanEagle[28,53]和ALADINA(Application of Light-weight Aircraft for Detecting IN situ Aerosol)[54,55],各系统无人机的主要特征如表3所示. ...
The use of ship-launched fixed-wing UAVs for measuring the marine atmospheric boundary layer and ocean surface processes
1
2016
... 大型无人机的起飞重量一般在10 kg以上,通常能够搭载3 kg以上的观测设备,续航时间一般在2~5 h,飞行距离可达300 km,可搭载包括涡动相关观测设备在内的多种类型观测设备,实现对湍流变量、辐射以及地表参数的多要素观测.目前代表性的观测系统有UMARS2(Unmanned Modular Airborne Research System)[52],Manta[26],Manta C1[28],ScanEagle[28,53]和ALADINA(Application of Light-weight Aircraft for Detecting IN situ Aerosol)[54,55],各系统无人机的主要特征如表3所示. ...
ALADINA — An unmanned research aircraft for observing vertical and horizontal distributions of ultrafine particles within the atmospheric boundary layer
1
2015
... 大型无人机的起飞重量一般在10 kg以上,通常能够搭载3 kg以上的观测设备,续航时间一般在2~5 h,飞行距离可达300 km,可搭载包括涡动相关观测设备在内的多种类型观测设备,实现对湍流变量、辐射以及地表参数的多要素观测.目前代表性的观测系统有UMARS2(Unmanned Modular Airborne Research System)[52],Manta[26],Manta C1[28],ScanEagle[28,53]和ALADINA(Application of Light-weight Aircraft for Detecting IN situ Aerosol)[54,55],各系统无人机的主要特征如表3所示. ...
New setup of the UAS ALADINA for measuring boundary layer properties, Atmospheric particles and solar radiation
1
2018
... 大型无人机的起飞重量一般在10 kg以上,通常能够搭载3 kg以上的观测设备,续航时间一般在2~5 h,飞行距离可达300 km,可搭载包括涡动相关观测设备在内的多种类型观测设备,实现对湍流变量、辐射以及地表参数的多要素观测.目前代表性的观测系统有UMARS2(Unmanned Modular Airborne Research System)[52],Manta[26],Manta C1[28],ScanEagle[28,53]和ALADINA(Application of Light-weight Aircraft for Detecting IN situ Aerosol)[54,55],各系统无人机的主要特征如表3所示. ...
Measuring the 3-D wind vector with a weight-shift microlight aircraft
Optimizing window length for turbulent heat flux calculations from airborne eddy covariance measurements under near neutral to unstable atmospheric stability conditions






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}