1 引 言
传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] 。Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] 。在实际数据同化应用中,EnKF方法是一种次优滤波。因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等。在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题。鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高。尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显。因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究。
本文在常用的协方差矩阵处理的局地化方法基础上耦合了模糊控制算法形成了新的算法——耦合模糊控制的局地化方法(Fuzzy control algorithm with Local Ensemble Transform Kalman Filter,FLETKF)。以典型的Lorenz混沌系统为例进行了模拟实验,验证了在不同强迫参数F 下,FLETKF能够保持在F =8时,混沌系统的非线性程度明显,FLETKF具有较好的同化效果。同时探究了FLETKF,FETKF,LETKF,ETKF算法在不同同化强度下,4种算法随着集合数的变化都有收敛的特性,同时,在R =10时, FLETKF方法的均方根误差(Root Mean Square Error,RMSE)相对FETKF方法的RMSE值减小98.2%,说明新的算法有更好的同化效果。
2 理论与算法
2.1 ETKF
Bishop等[9 ] 于2001年提出ETKF方法,是针对适应性观测问题提出的一种数据同化方法,其理论推导是基于Kalman滤波理论和集合变换思想得出的,是一种次优的数据同化方法,与EnKF方法[17 ] 不同之处在于:ETKF方法利用集合变换和无量纲化的思想,求解与观测有关的预报误差协方差矩阵[19 ] 。ETKF方法是通过将预报扰动乘以一个变换矩阵T 来得到分析扰动。如下式:
分析扰动:
Aa =TAf ,(1)
此时的分析误差协方差:
Pa =Zf TTf (Zf )T ,(2)
其中:
Zf =Af / m - 1
T =C [Γ +I ] - 1 2
式中:m 为集合数,P 为状态误差协方差矩阵,上标f 和a 分别表示预测和分析,A 表示扰动集合,I 表示单位矩阵,Γ 和C 分别表示矩阵(Zf )H T R -1 HZf 的特征值和特征向量。
2.2 局地化方法——LETKF
在集合数据同化中,通常有限的集合数在估计背景误差协方差矩阵时,在观测点和状态点会引入伪相关,从而造成协方差被低估,导致滤波发散。因此,为了降低协方差被低估,避免观测值与误差值引入伪相关,采用局地化分析的方法对协方差矩阵进行处理。
LETKF通过裁剪相关系数矩阵[23 ] 得到,其理论部分推导公式如下:
x i a x i f K i , : i ( d i - H i x f i ) , (5)
S i R i - 1 / 2 H i A i f / m - 1
K i i , : A i , : f S i T ( I + S i S i T ) -1 R i - 1 / 2 / m - 1
T i I + S i T S i ) -1/2 , (8)
A i . : a A i . : f T i
式中:上标i 表示局部,上标f 和a 分别表示预测和分析,上标T是矩阵的转置参数, S i H i K i , : i i 行, R i T i A i , : i i 行,x 是状态估计,d 是观测向量,H 是观测矩阵,m 为集合数,I 表示单位矩阵。
采用局地化分析方法对背景误差协方差处理可得到:LETKF方法可以消除背景误差协方差的矩阵的伪相关,减少远距离观测数据对更新状态变量的影响,同时,LETKF方法更新局部区域中心点的协方差,而其他非中心元素的协方差并不更新[24 ] 。
2.3 耦合模糊控制的局地化方法
2.3.1 模糊控制方法
在研究同化的基本性能时,多数研究者[17 ,25 ] 采用由Gaspari等[26 ] 于1999年提出的过滤函数(GC函数)做局地化处理,其中GC函数是一个五阶分段的有理函数,它依赖于长度尺度参数,并随着距离单调下降的函数[27 ] 。因此,为了获得更好的同化效果,采用耦合模糊控制的局地化方法,在已有的数据库和规则库的情况下,通过高斯函数对局地化系数coeffs进行模糊化处理,设置恰当的隶属度函数,预先设定好适当的观测权重进行决策,然后解模糊化,最后将获得各种模糊的变化量和各种控制量转换成能够用于实践操控中的清晰量。图1 给出结合模糊控制的同化系统原理图。
图1 耦合模糊控制的同化系统原理图
Fig.1 Schematic diagram of assimilation system coupled with the fuzzy control
2.3.2 观测位置信息模糊控制方法
在同化过程中,通过局地化方法可以改善有限集合数下的虚假相关问题,但是如何对观测位置和状态更新位置进行模糊控制,图2 给出了观测位置与状态位置的距离经过模糊控制后的同化示意图[22 ] ,其中“红七角星”为状态更新位置,“蓝五角星”为观测位置。传统局地化同化方案基于顺序滤波,在局地化区域(图2 中红正方形区域)的中心格点通过状态变量和所有观测数据依次循环演进到所有分析网格,且每个分析网格相互独立[28 ,29 ] 。新方法在状态估计更新之前,首先计算状态更新点与所有观测之间的物理距离;然后通过模糊控制对状态更新位置与观测位置之间距离进行模糊量化,确定观测点的权重,距离状态更新位置越近,观测点的权重越大,反之亦然[22 ] 。
图2 观测位置与状态之间模糊控制同化示意图[22 ]
Fig.2 Diagram of assimilation system coupled with the fuzzy control between observation position and status[22 ]
2.3.3 构造模糊控制过程
模糊控制过程包括模糊变量的定义(状态空间中2个背景向量之间的距离 dist)、模糊集合(权重)和模糊隶属度函数(选取三角形隶属度函数),根据模糊条件(if……then)描述观测点与状态更新网格点之间欧氏距离和权重之间的映射关系[25 ] ,构造出的模糊控制器能够通过模糊控制方案得到每一观测点权重,计算状态并更新向量[22 ] 。因此设计过程具体如下:
(1)模糊机理
在本文的实验中,在进行计算局地化系数时将输入数集“dist”转换为模糊的输入集(dist表示状态空间中2个背景向量元素之间的距离),它将确定的输入通过三角隶属度函数转换为模糊集,其中,模糊输入集“dist”又离散地分为{最近距离、近距离……远距离、最远距离},简写为{I 1 ,I 2 ,…,I 20 },将输入量化后,取输入语言变量论域为{0,20},在通过具体的模糊规则,得到输出“coeffs”的等价权重的模糊集为{最高权重、高权重……低权重、最低权重},简写为{O 1 ,O 2 ,…,O 20 },输出的变量论域为{0,1},控制量化因子为0.025。
(2)数据库
数据库所存放的所有输入、输出变量的全部模糊子集的隶属度值(即经过论域等级离散化以后对应值得集合)。本文的数据库为输入dist、输出coeffs,输入模糊子集为{I 1 ,I 2 ,…,I 20 },输出模糊子集为{O 1 ,O 2 ,…,O 20 },输入语言变量论域为{0,20},输出语言变量论域为{0,1},选用三角隶属度函数。
(3)规则库
模糊控制器的规则库基于专家知识或手动操作人员长期积累的经验,它是按人的直觉推理的一种语言表示形式。因此由输入量dist 和输出量 coeffs 的关系,设计模糊控制规则。
如果dist是最远距离,则coeffs是最低权重;
如果dist是次远距离,则coeffs是次低权重;
……
……
如果dist是次近距离,则coeffs是次高权重;
如果dist是最近距离,则coeffs是最高权重。
(4)模糊规则表的建立
在本文中,根据规则库,确定的输入变量为△dist,确定的输出变量为△coeffs,同时,本文实验的控制要求品质高,因此,变量的模糊状态取为如下:负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)。
在设计过程,控制规则使用如下形式的语言描述:
Rk : if distk Vk then coeffsk k
式中:V 表示模糊关系,具体计算如下:
V = ( I 1 × O 1 ) + ( I 2 × O 2 ) + … + ( I 20 × O 20 ) , ( 10 )
式中:I 1 ,I 2 ,…,I 20 分别表示“dist”离散后最近距离、近距离……最远距离;O 1 ,O 2 ,…,O 20 分别表示“coeffs”的分配等价权重为最高权重、高权重……最低权重。
实验的模糊控制规则如下表1 所列。
(5)三角隶属度函数
本文是将确定的隶属度函数离散化,得到有限个点上的隶属度,从而构成相应模糊变量的模糊子集。三角形隶属度函数定义如下:
f (x) = 0 , x < b x - b a - b , b ≤ x ≤ a , c - x c - a , a < x ≤ c 0 , x > c (11)
式中:参数b 和c 确定三角形的“脚”,而参数a 确定三角形的“峰”,对应的三角形隶属度函数如图3 所示。
图3 三角形隶属度函数图
Fig.3 The graph of triangle membership function
(6)控制量的反模糊化
根据模糊模糊控制理论,当输入变量“dist”和模糊关系矩阵“V ”完成模糊推理时,可以得到等价的观测权重“coeffs”的模糊集合。因此,最终控制变量如下式:
$coeffs=dist\circ V$。 (12)
最后对权重因子“coeffs”进行去模糊化,在去模糊化的处理过程中通常采用“最大隶属原则”,得到如下表2 所示模糊控制响应。
2.4 耦合FETKF
2.4.1 背景知识
对于数据同化而言,卡尔曼滤波方程的状态更新如下[17 ] :
xa =xf +K (d -Hxf ),(13)
Pa =(I -KH )Pf , (14)
卡尔曼增益矩阵K 计算如下:
K =PH T (HPH T +R )-1 ,(15)
状态的估计如下式:
x = 1 m E 1,(16)
状态向量的协方差计算如下:
P = 1 m - 1 AA T ,(17)
集合异常值计算如下:
A =E I - 1 m 11 T
式中:x 是状态估计;d 是观测向量;H 是观测矩阵,表示观测值与状态值之间的函数关系,它提供了从模型空间到观测空间的映射过程;P 是状态误差协方差;I 是单位矩阵;上标T是矩阵的转置;R 是观测误差协方差,也被称为非相关性误差,表示同一误差之间的相关性;m 表示集合数;E 是包含每个集合成员的列矩阵;A 是集合奇异值的矩阵;Pf 是预报误差协方差矩阵[27 ] 。
2.4.2 模糊控制与ETKF的结合
由上面模糊控制与LETKF的结合过程可知,模糊控制与ETKF结合有所区别,不同之处在于数据库更改,规则库中模糊关系发生变化,模糊机理不同,在与ETKF结合过程使用同样的三角函数隶属度,建立同样的模糊规则表,在反模糊的过程中同样采用最大隶属度原则,因此,设计过程如下:
(1)模糊机理
由于本实验对观测系数不需要进行局地化,也就是直接将输入集“dist”转换模糊输入集,通过三角形隶属度函数转换为离散地子集,简写为{i 1 ,i 2 ,…,i 20 },同样,将输入量化后,取输入语言变量论域为{0,20},在通过具体的模糊规则,经过标准正态分布函数计算,得到如下相应的输出关系:
g = exp - 1 2 ( dis t i / r ) 2 , ( 19 )
式中:r 为任意状态点与观测点2点之间的欧氏距离,disti
将得到的输出g 通过具体的模糊规则,得到其等价权重的模糊集简写为{o 1 ,o 2 ,…,o 20 },输出变量论域同样为{0,1},控制量化因子保持在0.025。
(2)数据库
数据库此时存储的数据为输入模糊子集{i 1 ,i 2 ,…,i 20 },输出模糊子集{o 1 ,o 2 ,…,o 20 },输入语言变量论域为{0,20},输出语言的变量论域{0,1},控制量化因子保持在0.025,同样选用三角隶属度函数。
(3)规则库
由于数据库改变,因此对应的输入变量dist和输出量g的与前面模糊规则关系一样,dist的距离越远,分配输出量g 的权重越小。控制规则使用如下形式的语言描述:
Rk :if disti Mi then gi , i =1,2,…,20。
其中,M 表示模糊关系,具体如下:
M = ( i 1 × o 1 ) + ( i 2 × o 2 ) + … + ( i 20 × o 20 ) 。 ( 20 )
(4)控制量的反模糊化
输入集“dist”和模糊关系“M”完成模糊推理后,同样得到观测权重“g ”的模糊集合,权重g 的数目理论取决于观测数,由算法合成规则可得:
$g=dist\circ M$。 (21)
同样对权重因子g 进行去模糊化,采用最大隶属度原则,得到如下表3 所示模糊控制响应。
2.5 FLETKF和FETKF的区别
FLETKF的模糊控制过程:FLETKF是加入局地化分析的方法后得到输入集dist,同样进行三角形隶属度函数离散化,得到的离散化后的值通过模糊规则输出等价权重;然后将离散后的dist和等价的权重进行笛卡尔乘积得到的值集合称为模糊关系V;最后将输入集dist和模糊关系V进行点积,采用最大隶属度函数原则去模糊化。
FETKF的模糊控制过程:FETKF是对观测系数不需要进行局地化,直接将输入集dist通过三角形隶属度函数离散化,通过模糊规则,得到的离散化后的值经过标准正态分布函数进行计算出相应的权重;然后将离散后的dist和等价的权重进行笛卡尔乘积得到的值集合称为模糊关系M;最后将输入集dist和模糊关系M进行点积,采用最大隶属度函数原则去模糊化。
因此,FLETKF算法和FETKF算法分别与模糊控制结合过程中主要区别在于数据库更改,规则库中模糊关系发生变化,模糊机理不同,在与ETKF结合过程使用同样的三角函数隶属度,建立同样的模糊规则表,在反模糊的过程中同样采用最大隶属度原则得到了不同的模糊控制响应表。
3 非线性数值实验
3.1 概述
FLETKF和FETKF算法有效利用40维的非线性混沌系统Lorenz-96验证,由于经典四阶Runge-Kutta可以获得Lorenz-96的数值解。
d X k d t = ( X k + 1 - X k - 2 ) X k - 1 - X k + F , ( 22 )
式中:Xk 表示第k 个状态时的真值,k =1,2,…,40;F 表示强迫参数。
3.2 性能指标
在实验中,采用RMSE检验同化方法性能误差因子,采用如下评价指标:
RMS E a = 1 n ( ∑ t = 1 n ( x - x t ) 2 ) , ( 23 )
式中:n 为模型状态向量的维数,x 为估计值,xt 为t 时刻模型状态真值。
3.3 数值实验
Lorenz-96模型为强迫耗散模型,F 为控制混沌系统的强迫参数,当F >4时,其解为混沌状态[30 ] 。改变强迫参数F 的值,改变模型的非线性程度,对比4种方法在不同强迫参数下的均方根误差。为了验证4种算法的性能,在实验中,选取强迫参数F 为4~12,间隔为1。
如图4 所示,在不同强迫参数下4种方法的RMSE对比,实验设置:集合数N =15,观测数O =20,模型步长T =20,观测误差协方差R =1,放大因子为1.01,取F ∈[4,5,…,12]。
图4 强迫参数F 对同化结果的影响
Fig.4 The influence of forcing parameters F for assimilation results
结果显示:①随着强迫参数的增大,混沌系统的非线性程度越明显。4种算法都能同时在F =8处取得最小值,符合混沌的特点。②当强迫参数变化时,FLETKF的RMSE最小,与FETKF,LETKF和ETKF相比,FLETKF表现出较好的鲁棒性。
如图5 所示,4种算法的RMSE随着驱动参数F 变化而变化。实验设置:集合数N =15,观测数O =20,模型步长T =20,放大因子为1.01。
图5 随强迫参数F 变化的RMSE变化趋势
Fig.5 The variable trend of RMSE with forcing parameters F
结果显示:在F ∈[4,5,…,12]时,4种算法的RMSE值都大于F =8时的值,说明当F 值偏离8越大时,4种算法得到的分析误差越大,模型误差越大,同化效果不明显[23 ] 。
3.4 4种算法在不同强度下的性能比较
由于在同化过程中,采用传播减小因子kσ 来评估同化强度[17 ] ,其表达式如下:
kσ =σf /σa ,(24)
σ = tr ( HP H T R - 1 )
式中:H 是观测算子,P 是状态误差协方差矩阵,R 是观测误差协方差,上标f 和a 表示预测和分析,上标T表示转置,在一般情况下,σ 表示观测误差协方差的修正值。
P = 1 m - 1 AA T ,(26)
公式(25)中,σ 与R 有关,若R 变大,σ 值变小,当且仅当kσ -1<<1时,引用Sakov等[17 ] 对同化强度的定义,此时,同化强度为“弱”同化,即在状态变量的更新过程中观测信息占的权重远小于模型预测信息,观测数据的贡献较少。若R 越小,σ 值越大,当且仅当kσ -1>>1时,同化强度定义为“强”同化,即在状态变量的更新过程中观测信息占的权重远大于模型预测信息,引入了较多的观测信息。但在R 和σ 变化过程中,有一个临界值,使得当R 值与σ 值变化到kσ -1≈1时,同化强度定义为“中”同化,即观测信息和预测信息权重相当[23 ] 。
由公式(25)可知,当R =0.001,也就是“强”同化条件下,图6 中4种算法随集合数的增加,它们的RMSE呈下降的趋势,其中,FLETKF的RMSE在N =3~9下降速度较快,而且小于其他3种算法,表现出较好的收敛性,而 ETKF的初始RMSE大于5,而其他3种算法的RMSE均小于5,表现出ETKF对同化的不敏感性,但总体来说,4种算法都呈现收敛的特性。
图6 同化强度为R =0.001时,4种算法随集合数的变化
Fig.6 The four algorithms vary with the Ensemble number when assimilation intensity R is 0.001
当R =1,也就是“中”同化条件下,图7 中ETKF算法随着集合数的增加表现平稳的趋势,表现出ETKF对同化效果不敏感性,相对于R =0.001,4种算法的RMSE整体较小,说明了在不同强度下,对4种算法的影响比较明显。但相对而言,FLETKF的RMSE总能小于其他3种算法,表现出较好的收敛性。
图7 同化强度为R =1时,4种算法随集合数的变化
Fig.7 The four algorithms vary with the Ensemble number when assimilation intensity R is 1
当R =10,也就是“弱”同化条件下,图8 中ETKF算法在N >20时,呈现滤波发散状态,但在整体效果上,相对于R =0.001,4种算法的RMSE较小,同时FLETKF呈收敛趋势,表现出良好的鲁棒性。
图8 同化强度为R =10时,4种算法随集合数的变化
Fig.8 The four algorithms vary with the Ensemble number when assimilation intensity R is 10
从图6 ~8中可以看出:在固定强迫参数F =8,改变观测误差协方差R 的值,对4种方法误差性能做比较,得出:随着集合数的增加,在固定强迫参数F ,不同的强度下FLETKF都能表现出较好的鲁棒稳健性。
综上所述,在不同的同化强度下,4种算法随着集合数的增加都表现收敛的特点,但在“中”同化强度下,ETKF的RMSE呈现平稳的特点,表现出ETKF在“中”同化强度下对同化的不敏感性,同时,说明了在不同同化强度下,对4种算法的RMSE影响比较大,尤其在“强”同化条件下,对4种算法的RMSE影响较大。但FLETKF在不同同化强度下,都能表现出较好的收敛特性。
表4 为在不同同化强度下的4种算法在时间性能上的比较,分别取观测误差协方差R =0.001,R =1和R =10,即分别在“强”同化下,“中”同化和“弱”同化条件下,4种算法中在同化过程消耗的时间上逐渐增加,FLETKF算法在同化过程需要的时间在8~13 s,FETKF算法在同化过程需要的时间在7~9 s,而ETKF方法在同化过程需要的时间为0.012 s,LETKF方法在同化过程需要的时间接近0.3 s,因此,可发现FLETKF和FETKF方法在模糊控制过程中需要额外的时间对观测位置距离进行判断并给出适当权重,所以运行时间较长。
3.5 FETKF与FLETKF的RMSE值减小百分比性能比较
表5 分别列出了FLETKF方法和FETKF方法随着R 的变化以及FLETKF方法RMSE值相对于FETKF方法的RMSE值减小的百分比。
得出的结论是:利用非线性Lorenz-96模型,将FETKF方法和FLETKF进行了比较研究。在同化过程中,FLETKF方法的RMSE均值总是小于FETKF的值,说明FLETKF方法在同化的过程中有很强的收敛性,而且在R =10时,表征了FLETKF算法比FETKF算法优98.2%。
4 结 论
在陆面数据同化的过程中,由于状态的不断更新,最优的估计状态需要通过观测值进行不断的修正,在高维的混沌系统中,由于维数过高,观测值难以得到充分利用,同时,在同化过程当中,背景误差协方差会被低估,分析误差不断积累,在估计背景误差协方差矩阵时,在观测点和状态点会引入伪相关,最终导致同化精度降低,滤波发散,难以得到真实有效的最优状态估计。针对上面的问题,提出了通过模糊控制方法构造相应的观测位置等价权重,结合LETKF方法对局地化系数进行有效的更新,实验结果表明:新的方法在一定程度上提高了同化效果,避免了背景误差协方差矩阵的虚假相关,减少了远距离的观测数据对状态更新变量的影响;随着混沌模型中强迫参数的变化和在不同同化强度下,验证了新方法有较强的收敛性。未来,将结合典型的陆面数据同化模型,将新的耦合模糊的局地化方法能够应用于陆面数据同化过程中。
The authors have declared that no competing interests exist.
参考文献
文献选项
[1]
Basar T A New Approach to Linear Filtering and Prediction Problems [M]. Wiley-IEEE Press, 2009 : 35 -45 . DOI :10.1109/9780470544334.ch9 .
[本文引用: 1]
[2]
Han Pei Shu Hong Xu Jianhui et al An applicability study of covariance localization method in ETKF data assimilation
[J]. Journal of Earth Information Science , 2016 , 18 (9 ): 1 184 -1 190 .
[本文引用: 1]
[韩培 , 舒红 , 许剑辉 ,等 . 局地化方法在集合转换卡尔曼滤波同化的适用性研究
[J]. 地球信息科学学报 , 2016 ,18 (9 ):1 184 -1 190 .]
DOI
URL
[本文引用: 1]
摘要
为了探索协方差局地化(Covariance Localization,CL)方法在集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)同化的适用性,本文在理论上分析了CL方法应用于ETKF同化存在的困难,发展了一种适用于ETKF同化的对集合扰动进行舒尔积运算的近似CL方法,并结合Lorenz-96模型对近似CL方法的适用性及其对同化结果的影响进行了分析。研究结果表明:CL方法不仅能消除背景误差协方差矩阵中的伪相关,还能增加背景误差协方差矩阵的秩,但CL方法并不能直接用于ETKF同化;近似CL方法可应用于ETKF同化中,但近似舒尔积破坏了ETKF同化系统的动态平衡,导致同化结果误差较大;与CL方法相反,局地化分析(Local Analysis,LA)方法可直接应用于ETKF同化,并能较好地消除ETKF同化的背景误差协方差矩阵的伪相关,获得较优的同化结果。
[3]
Evensen G Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics
[J]. Journal of Geophysical Research , 1994 , 99 (C5 ): 10 143 -10 162 .
DOI
URL
[本文引用: 1]
[4]
Ehrendorfer M A review of issues in ensemble-based Kalman filtering
[J]. Meteorologische Zeitschrift , 2007 ,16 (6 ): 795 -818 .
DOI
URL
[本文引用: 1]
摘要
Ensemble-based data assimilation methods related to the fundamental theory of Kalman filtering have been explored in a variety of mostly non-operational data assimilation contexts over the past decade with increasing intensity. While promising properties have been reported, a number of issues that arise in the development and application of ensemble-based data assimilation techniques, such as in the basic form of the ensemble Kalman filter (EnKF), still deserve particular attention. The necessity of employing an ensemble of small size represents a fundamental issue which in turn leads to several related points that must be carefully considered. In particular, the need to correct for sampling noise in the covariance structure estimated from the finite ensemble must be mentioned. Covariance inflation, localization through a Schur/Hadamard product, preventing the occurrence of filter divergence and inbreeding, as well as the loss of dynamical balances, are all issues directly related to the use of small ensemble sizes. Attempts to reduce effectively the sampling error due to small ensembles and at the same time maintaining an ensemble spread that realistically describes error structures have given rise to the development of variants of the basic form of the EnKF. These include, for example, the Ensemble Adjustment Kalman Filter (EAKF), the Ensemble Transform Kalman Filter (ETKF), the Ensemble Square-Root Filter (EnSRF), and the Local Ensemble Kalman Filter (LEKF). Further important considerations within ensemble-based Kalman filtering concern issues such as the treatment of model error, stochastic versus deterministic updating algorithms, the ease of implementation and computational cost, serial processing of observations, avoiding the appearance of undesired dynamic imbalances, and the treatment of non-Gaussianity and nonlinearity. The discussion of the above issues within ensemble-based Kalman filtering forms the central topic of this article, that starts out with a brief overview of Bayesian updating and Kalman filtering theory. The article collects and discusses evidence related to these issues thus assessing also the status of knowledge regarding the performance of ensemble-based Kalman filtering methods.
[5]
Ott E Hunt B R Szunyogh I et al A local ensemble Kalman filter for atmospheric data assimilation
[J]. Tellus Series A —Dynamic Meteorology and Oceanography 2004 , 56 (5 ): 415 -428 .
DOI
URL
[本文引用: 1]
摘要
Abstract: In this paper, we introduce a new, local formulation of the ensemble Kalman Filter approach for atmospheric data assimilation. Our scheme is based on the hypothesis that, when the Earth's surface is divided up into local regions of moderate size, vectors of the forecast uncertainties in such regions tend to lie in a subspace of much lower dimension than that of the full atmospheric state vector of such a region. Ensemble Kalman Filters, in general, assume that the analysis resulting from the data assimilation lies in the same subspace as the expected forecast error. Under our hypothesis the dimension of this subspace is low. This implies that operations only on relatively low dimensional matrices are required. Thus, the data analysis is done locally in a manner allowing massively parallel computation to be exploited. The local analyses are then used to construct global states for advancement to the next forecast time. The method, its potential advantages, properties, and implementation requirements are illustrated by numerical experiments on the Lorenz-96 model. It is found that accurate analysis can be achieved at a cost which is very modest compared to that of a full global ensemble Kalman Filter.
[6]
Chen Y Oliver D S Ensemble-based closed-loop optimization applied to brugge field
[J]. SPE Reservoir Evaluation & Engineering , 2010 , 13 (1 ):56 -71 .
DOI
URL
[本文引用: 1]
摘要
Abstract In closed-loop reservoir management, geologic properties are updated sequentially using available data, and model-based optimization is used to search for the optimal operating strategy. Ensemble-based methods can be used to solve both data assimilation and production optimization with the gradient approximated from an ensemble. This ensemble-based closed-loop optimization method is flexible and has been illustrated using a small scale problem in Chen et al. (2008). The dimensionality of the model parameter and control parameter space are high in large scale problems. Approximating the gradient using small ensembles might result in unsatisfactory solution of the ensemble-based closed-loop optimization. In this paper the ensemble-based closed-loop optimization is applied to a large scale SPE Benchmark study. Brugge field, a synthetic reservoir, is designed as a common platform to test different methods for closed-loop reservoir management. The problem was designed to mimic real field scenarios, and as a result is by far the largest and most complex test case on closed-loop optimization. The Brugge field model consists of nine layers and the number of active cells is 44550. It has one internal fault and seven rock regions with different relative permeability and capillary pressure functions. There are 20 producers and 10 injectors in the field. Noise corrupted production data are provided monthly. Additionally, time-lapse seismic data are available at year ten. Each well has three different completions that can be controlled independently. The producing life of the reservoir is 30 years and the objective of optimization is to maximize the net present value at the end of 30 years. Due to the complexity of this test case, several advanced techniques are used in order to improve the solution of the ensemble-based closed-loop optimization. Saturation normalization is used to account for the presence of difference rock regions. Localization is used in the assimilation of production and seismic data to increase the effective size of the ensemble and to alleviate the effect of spurious correlations resulted from the small ensemble. Relative permeability curves and initial oil water contact are estimated together with the gridblock properties. Covariance inflation is used to maintain the desired variability in the ensemble. We expect that these techniques will also be critical in real field application of the ensemble-based closed-loop optimization.
[7]
Sakov P Oke P R A deterministic formulation of the ensemble Kalman filter: An alternative to ensemble square root filters
[J]. Tellus Series A —Dynamic Meteorology & Oceanography 2008 , 60 (2 ): 361 -371 .
[本文引用: 1]
[8]
Whitaker J S Hamill T M Ensemble data assimilation without perturbed observations
[J]. Monthly Weather Review , 2002 , 130 (7 ): 1 913 -1 924 .
DOI
URL
[本文引用: 2]
摘要
Abstract The ensemble Kalman filter (EnKF) is a data assimilation scheme based on the traditional Kalman filter update equation. An ensemble of forecasts are used to estimate the background-error covariances needed to compute the Kalman gain. It is known that if the same observations and the same gain are used to update each member of the ensemble, the ensemble will systematically underestimate analysis-error covariances. This will cause a degradation of subsequent analyses and may lead to filter divergence. For large ensembles, it is known that this problem can be alleviated by treating the observations as random variables, adding random perturbations to them with the correct statistics. Two important consequences of sampling error in the estimate of analysis-error covariances in the EnKF are discussed here. The first results from the analysis-error covariance being a nonlinear function of the background-error covariance in the Kalman filter. Due to this nonlinearity, analysis-error covariance estimates ...
[9]
Bishop C H Etherton B J Majumdar S J Adaptive sampling with the ensemble transform Kalman Filter. Part I: Theoretical aspects
[J]. Monthly Weather Review , 2001 , 129 (3 ): 420 -436 .
DOI
URL
[本文引用: 2]
[10]
Houtekamer P L Mitchell H L A sequential ensemble Kalman filter for atmospheric data assimilation
[J]. Monthly Weather Review , 2001 , 129 (1 ): 123 -137 .
DOI
URL
[本文引用: 1]
[11]
Anderson J L Exploring the need for localization in ensemble data assimilation using a hierarchical ensemble filter
[J]. Physica D Nonlinear Phenomena , 2007 , 230 (1 ): 99 -111 .
DOI
URL
[本文引用: 1]
[12]
Miyoshi T Yamane S Enomoto T Localizing the error covariance by physical distances within a Local Ensemble Transform Kalman Filter (LETKF)
[J]. SOLA , 2007 , 3 : 89 -92 .
DOI
URL
[本文引用: 1]
[13]
Han Xujun Li Xin Review of the nonlinear filters in the land data assimilation
[J]. Advances in Earth Science , 2008 , 23 (8 ): 813 -820 .
Magsci
[本文引用: 1]
[韩旭军 ,李新 . 非线性滤波方法与陆面数据同化
[J]. 地球科学进展 ,2008 ,23 (8 ):813 -820 .]
DOI
URL
Magsci
[本文引用: 1]
摘要
<p>陆面数据同化研究近几年成为地球科学研究的新兴领域,其中以非线性滤波为代表的数据同化方法发展迅速并得到了广泛应用。在贝叶斯理论框架内,从递推贝叶斯估计理论的角度系统地分析了扩展卡尔曼滤波、无迹卡尔曼滤波、集合卡尔曼滤波、SIR粒子滤波等非线性滤波方法的异同;针对应用比较广泛的集合卡尔曼滤波和SIR粒子滤波应用中存在的问题,论述了几种提高滤波性能的实用方法,如协方差矩阵的Localization方法、协方差矩阵的Inflation方法、双集合卡尔曼滤波方法、扰动集合、扰动大气驱动和模型参数、平方根集合卡尔曼滤波以及粒子滤波算法的改进等。最后总结讨论了各种非线性滤波方法应用中的特点、难点以及各种算法在陆面数据同化中的应用前景和发展方向。</p>
[14]
Zhou Jian Wang Genxu Li Xin et al Data assimilation algorithm apply to energy-water balance analysis of the high cold ecosystem at Qinghai-Tibet Plain, Northwest China
[J]. Advances in Earth Science , 2008 , 23 (9 ): 965 -973 .
Magsci
[本文引用: 1]
[周剑 ,王根绪 ,李新 ,等 . 数据同化算法在青藏高原高寒生态系统能量—水分平衡分析中的应用
[J]. 地球科学进展 ,2008 , 23 (9 ):965 -973 . ]
URL
Magsci
[本文引用: 1]
摘要
<p>位于青藏高原腹地的多年冻土地带,其冻融过程中的土壤含水量和土壤冻结深度的变化对气候强烈响应并产生显著的陆面能—水平衡变化,进而又对全球气候产生较大的反馈作用。为了能准确模拟这种变化,选取青藏高原多年冻土分布区的风火山左冒孔流域(长江源)进行了相关的野外数据采集和试验,以考虑土壤冻融影响的水—热耦合陆面过程模型——SHAW为动力学约束框架,验证集合卡尔曼滤波算法在改进模型对土壤冻融过程中土壤水分和冻土深度的计算效果。基于试验点的数据同化计算结果表明:数据同化方法可以融合观测信息显著提高水—热耦合模型对土壤冻融过程中状态变量(土壤水分和冻深)的模拟,并进而改善模型对其它相关能量—水分变量的计算,为在高寒冻土地区利用多源信息进行融合监测提供了理论依据。</p>
[15]
Sakov P Evensen G Bertino L Asynchronous data assimilation with the EnKF
[J]. Tellus Series A —Dynamic Meteorology & Oceanography 2010 , 62 (1 ): 24 -29 .
DOI
URL
[本文引用: 1]
摘要
This study revisits the problem of assimilation of asynchronous observations, or four-dimensional data assimilation, with the ensemble Kalman filter (EnKF). We show that for a system with perfect model and linear dynamics the ensemble Kalman smoother (EnKS) provides a simple and efficient solution for the problem: one just needs to use the ensemble observations (that is, the forecast observations for each ensemble member) from the time of observation during the update, for each assimilated observation. This recipe can be used for assimilating both past and future data; in the context of assimilating generic asynchronous observations we refer to it as the asynchronous EnKF. The asynchronous EnKF is essentially equivalent to the four-dimensional variational data assimilation (4D-Var). It requires only one forward integration of the system to obtain and store the data necessary for the analysis, and therefore is feasible for large-scale applications. Unlike 4D-Var, the asynchronous EnKF requires no tangent linear or adjoint model.
[16]
Luo X Hoteit I Robust ensemble filtering and its relation to covariance inflation in the ensemble Kalman filter
[J]. Monthly Weather Review , 2011 , 139 (12 ): 3 938 -3 953 .
DOI
URL
[本文引用: 1]
[17]
Sakov P Bertino L Relation between two common localisation methods for the EnKF
[J]. Computational Geosciences , 2011 , 15 (2 ):225 -237 .
DOI
URL
[本文引用: 6]
摘要
This study investigates the relation between two common localisation methods in ensemble Kalman filter (EnKF) systems: covariance localisation and local analysis. Both methods are popular in large-scale applications with the EnKF. The case of local observations with non-correlated errors is considered. Both methods are formulated in terms of tapering of ensemble anomalies, which provides a framework for their comparison. Based on analytical considerations and experimental evidence, we conclude that in practice the two methods should yield very similar results, so that the choice between them should be based on other criteria, such as numerical effectiveness and scalability.
[18]
Roh S Genton M G Jun M et al Observation quality control with a robust ensemble Kalman filter
[J]. Monthly Weather Review , 2013 , 141 (12 ): 4 414 -4 428 .
DOI
URL
[本文引用: 1]
摘要
Current ensemble-based Kalman filter (EnKF) algorithms are not robust to gross observation errors caused by technical or human errors during the data collection process. In this paper, the authors consider two types of gross observational errors, additive statistical outliers and innovation outliers, and introduce a method to make EnKF robust to gross observation errors. Using both a one-dimensional linear system of dynamics and a 40-variable Lorenz model, the performance of the proposed robust ensemble Kalman filter (REnKF) was tested and it was found that the new approach greatly improves the performance of the filter in the presence of gross observation errors and leads to only a modest loss of accuracy with clean, outlier-free, observations.
[19]
Bai Yulong Gao Haisha Chai Qianlong et al Comparative studies of sequential data assimilation methods based on Lorenz-96 Modes
[J]. Remote Sensing Technology and Application , 2013 , 28 (2 ): 276 -282 .
Magsci
[本文引用: 2]
[摆玉龙 ,高海沙 ,柴乾隆 ,等 . 基于Lorenz-96模型的顺序数据同化方法比较研究
[J]. 遥感技术与应用 , 2013 ,28 (2 ):276 -282 .]
URL
Magsci
[本文引用: 2]
摘要
<p>顺序数据同化方法在数据同化系统中得到了广泛的应用,其性能各有优缺。选择3种典型的顺序数据同化算法,即集合Kalman滤波,集合转换Kalman滤波和确定性Kalman滤波,使用经典的Lorenz-96模型进行敏感性实验,研究不同的关键参数变化,如集合数目变化、观测数变化、误差放大因子变化和定位半径变化时对同化效果的影响。实验表明:集合数目和观测数目的多少直接影响3种方法的同化效果;协方差放大因子和定位半径的选择会提高同化精度。综合比较,确定性集合Kalman滤波算法是一种具有较强鲁棒性的滤波算法,能够在集合数较小的情况下达到较好的同化效果。</p>
[20]
Kirchgessner P Nerger L Bunsegerstner A On the choice of an optimal localization radius in ensemble kalman filter methods
[J]. Monthly Weather Review , 2014 , 142 (6 ): 2 165 -2 175 .
DOI
URL
[本文引用: 1]
摘要
In data assimilation applications using ensemble Kalman filter methods, localization is necessary to make the method work with high-dimensional geophysical models. For ensemble square-root Kalman filters, domain localization (DL) and observation localization (OL) are commonly used. Depending on the localization method, one has to choose appropriate values for the localization parameters, such as the localization length and the weight function. Although frequently used, the properties of the localization techniques are not fully investigated. Thus, up to now an optimal choice for these parameters is a priori unknown and they are generally found by expensive numerical experiments. In this study, the relationship between the localization length and the ensemble size in DL and OL is studied using twin experiments with the Lorenz-96 model and a 2-dimensional shallow water model. For both models, it is found that the optimal localization length for DL and OL depends linearly on an effective local observation dimension that is given by the sum of the observation weights. In the experiments no influence of the model dynamics on the optimal localization length was observed. The effective observation dimension defines the degrees of freedom that are required for assimilating observations, while the ensemble size defines the available degrees of freedom. Setting the localization radius such that the effective local observation dimension equals the ensemble size yields an adaptive localization radius. Its performance is tested using a global ocean model. The experiments show that the analysis quality using the adaptive localization is similar to the analysis quality of an optimally tuned constant localization radius.
[21]
Mao Fuping Zhang Shuwen Ye Dan et al Impact of time correlated model errors on soil moisture estimates with the ensemble square root filter
[J]. Advances in Earth Science , 2015 , 30 (6 ): 700 -708 .
Magsci
[本文引用: 1]
[毛伏平 ,张述文 ,叶丹 ,等 . 模式时间关联误差对集合平方根滤波估算土壤湿度的影响
[J]. 地球科学进展 ,2015 ,30 (6 ):700 -708 .]
DOI
URL
Magsci
[本文引用: 1]
摘要
<p>为了定量评估模式时间关联误差对NOAH陆面模式同化表层土壤湿度观测估算土壤湿度廓线的影响,采用集合平方根滤波(EnSRF)与状态增广相结合的技术,开展同时更新状态变量和订正模式偏差的观测系统模拟试验,结果表明:同化时若不对存在较大系统性偏差的模式时间关联误差进行处理,EnSRF就不能有效估算土壤湿度廓线,而采用状态增广和EnSRF相结合的技术,可以在更新土壤湿度时同步订正模式偏差,土壤湿度估算精度明显提高。敏感性试验进一步表明:模式偏差大小、同化时间间隔和观测误差会以不同方式对同化结果造成影响。</p>
[22]
Lu Yongnan Bai Yulong Xu Baoxiong et al Observation error handling methods of data assimilation coupled with fuzzy control algorithms
[J]. Remote Sensing Technology and Application , 2017 , 32 (3 ): 459 -465 .
[本文引用: 6]
[卢勇男 ,摆玉龙 ,徐宝兄 ,等 . 耦合模糊控制算法的数据同化观测误差处理方法
[J]. 遥感技术与应用 ,2017 , 32 (3 ):459 -465 .]
DOI
URL
[本文引用: 6]
摘要
针对数据同化过程中集合数目有限情形下的虚假相关问题,通过模糊控制算法判断观测点与状态更新点之间的距离,构造观测位置等价权重,与集合转换卡尔曼滤波方法相结合,提出一种新的数据同化方法。利用经典的Lorenz-96混沌模型,比较分析集合转换卡尔曼滤波(ETKF),局地化集合转换卡尔曼滤波(LETKF)和模糊控制数据同化算法(FETKF)在不同参数变化时的性能,由此探讨3种方法的优劣。研究结果表明:新方法能够使每一步状态更新获得更有效的观测信息,减小因观测数据难以得到有效利用而带来的误差,同时避免了同化过程中的虚假相关问题,从而提高滤波精度。
[23]
Wu Guocan Zheng Xiaogu Analysis programme in assimilation of ensemble transform Kalman Filter
[J]. China Sciencepaper , 2015 , 10 (3 ): 256 -260 .
[本文引用: 3]
[吴国灿 ,郑小谷 . 集合转换卡尔曼滤波同化的一种分析方案
[J]. 中国科技论文 ,2015 ,10 (3 ):256 -260 .]
[本文引用: 3]
[24]
Han Pei Shu Hong Xu Jianhui A comparative study of background error covariance localization in EnKF data assimilation
[J]. Advances in Earth Science , 2014 , 29 (10 ): 1 175 -1 185 .
[本文引用: 1]
[韩培 ,舒红 ,许剑辉 . EnKF同化的背景误差协方差矩阵局地化对比研究
[J]. 地球科学进展 ,2014 , 29 (10 ):1 175 -1 185 .]
[本文引用: 1]
[25]
Ying H Ding Y Li S et al Comparison of necessary conditions for typical Takagi-Sugeno and Mamdani fuzzy systems as universal approximators
[J]. IEEE Transactions on Systems Man & Cybernetics Part A : Systems & Humans 1999 , 29 (5 ): 508 -514 .
[本文引用: 2]
[26]
Gaspari G Cohn S E Construction of correlation functions in two and three dimensions
[J]. Quarterly Journal of the Royal Meteorological Society , 1999 , 125 (554 ): 723 -757 .
DOI
URL
[本文引用: 1]
[27]
Huang Zhihui Bai Yulong Shao Yu et al Data assimilation strategy research with small ensemble circumstance
[J]. Computer Engineering and Applications , 2015 , 51 (7 ): 209 -214 .
Magsci
[本文引用: 2]
[黄智慧 ,摆玉龙 ,邵宇 ,等 . 小集合数条件下的数据同化策略研究
[J].计算机工程与应用 ,2015 ,51 (7 ):209 -214 .]
DOI
URL
Magsci
[本文引用: 2]
摘要
基于集合的数据同化方法近年来得到广泛的重视和研究,已经逐步实验在业务大气数据同化系统中来替代变分类方法。集合Kalman滤波方法高度依赖于集合的大小,集合数过小会带来欠采样,协方差低估,滤波发散和远距离的虚假相关等问题。局地化技术可以有效改善小集合带来的相关问题。在Lorenz-96模型的基础上,研究有无局地化的效果差异,探讨小集合条件下的局地化技术的优劣性;提出一种基于功率谱密度(PSD)判断集合数据同化效果的办法。实验证明:在有限集合数下,采用Kalman增益值和PSD可以评价同化效果,结合局地化技术,可以获得效率更高的同化算法。
[28]
Yang S C Kalnay E Hunt B et al Weight interpolation for efficient data assimilation with the Local Ensemble Transform Kalman Filter
[J]. Quarterly Journal of the Royal Meteorological Society , 2009 , 135 (638 ): 251 -262 .
DOI
URL
[本文引用: 1]
[29]
Hunt B R Kostelich E J Szunyogh I Efficient data assimilation for spatiotemporal chaos: A local ensemble transform Kalman Filter
[J]. Physica D : Nonlinear Phenomena 2007 , 230 (1 ): 112 -126 .
DOI
URL
[本文引用: 1]
摘要
Data assimilation is an iterative approach to the problem of estimating the state of a dynamical system using both current and past observations of the system together with a model for the system’s time evolution. Rather than solving the problem from scratch each time new observations become available, one uses the model to “forecast” the current state, using a prior state estimate (which incorporates information from past data) as the initial condition, then uses current data to correct the prior forecast to a current state estimate. This Bayesian approach is most effective when the uncertainty in both the observations and in the state estimate, as it evolves over time, are accurately quantified. In this article, we describe a practical method for data assimilation in large, spatiotemporally chaotic systems. The method is a type of “ensemble Kalman filter”, in which the state estimate and its approximate uncertainty are represented at any given time by an ensemble of system states. We discuss both the mathematical basis of this approach and its implementation; our primary emphasis is on ease of use and computational speed rather than improving accuracy over previously published approaches to ensemble Kalman filtering. We include some numerical results demonstrating the efficiency and accuracy of our implementation for assimilating real atmospheric data with the global forecast model used by the US National Weather Service.
[30]
Lorenz E N Emanuel K A Optimal sites for supplementary weather observations: Simulation with a small model
[J]. Journal of the Atmospheric Sciences , 1998 , 55 (3 ): 399 -414 .
DOI
URL
[本文引用: 1]
摘要
Anticipating the opportunity to make supplementary observations at locations that can depend upon the current weather situation, the question is posed as to what strategy should be adopted to select the locations, if the greatest improvement in analyses and forecasts is to be realized. To seek a preliminary answer, the authors introduce a model consisting of 40 ordinary differential equations, with the dependent variables representing values of some atmospheric quantity at 40 sites spaced equally about a latitude circle. The equations contain quadratic, linear, and constant terms representing advection, dissipation, and external forcing. Numerical integration indicates that small errors (differences between solutions) tend to double in about 2 days. Localized errors tend to spread eastward as they grow, encircling the globe after about 14 days.In the experiments presented, 20 consecutive sites lie over the ocean and 20 over land. A particular solution is chosen as the true weather. Every 6 h observations are made, consisting of the true weather plus small random errors, at every land site, and at one ocean site to be selected by the strategy being considered. An analysis is then made, consisting of observations where observations are made and previously made 6-h forecasts elsewhere. Forecasts are made for each site at ranges from 6 h to 10 days. In all forecasts, a slightly weakened external forcing is used to simulate the model error. This process continues for 5 years, and mean-square forecast errors at each site at each range are accumulated.Strategies that attempt to locate the site where the current analysis, as made without a supplementary observation, is most greatly in error are found to perform better than those that seek the oceanic site to which a chosen land site is most sensitive at a chosen range. Among the former are strategies based on the `breeding' method, a variant of singular vectors, and ensembles of `replicated' observations; the last of these outperforms the others. The authors speculate as to the applicability of these findings to models with more realistic dynamics or without extensive regions devoid of routine observations, and to the real world.
1
2009
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
局地化方法在集合转换卡尔曼滤波同化的适用性研究
1
2016
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
局地化方法在集合转换卡尔曼滤波同化的适用性研究
1
2016
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics
1
1994
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
A review of issues in ensemble-based Kalman filtering
1
2007
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
A local ensemble Kalman filter for atmospheric data assimilation
1
2004
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
Ensemble-based closed-loop optimization applied to brugge field
1
2010
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
A deterministic formulation of the ensemble Kalman filter: An alternative to ensemble square root filters
1
2008
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
Ensemble data assimilation without perturbed observations
2
2002
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
... [8 ]于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
Adaptive sampling with the ensemble transform Kalman Filter. Part I: Theoretical aspects
2
2001
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
... Bishop等[9 ] 于2001年提出ETKF方法,是针对适应性观测问题提出的一种数据同化方法,其理论推导是基于Kalman滤波理论和集合变换思想得出的,是一种次优的数据同化方法,与EnKF方法[17 ] 不同之处在于:ETKF方法利用集合变换和无量纲化的思想,求解与观测有关的预报误差协方差矩阵[19 ] .ETKF方法是通过将预报扰动乘以一个变换矩阵T 来得到分析扰动.如下式: ...
A sequential ensemble Kalman filter for atmospheric data assimilation
1
2001
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
Exploring the need for localization in ensemble data assimilation using a hierarchical ensemble filter
1
2007
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
Localizing the error covariance by physical distances within a Local Ensemble Transform Kalman Filter (LETKF)
1
2007
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
非线性滤波方法与陆面数据同化
1
2008
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
非线性滤波方法与陆面数据同化
1
2008
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
数据同化算法在青藏高原高寒生态系统能量—水分平衡分析中的应用
1
2008
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
数据同化算法在青藏高原高寒生态系统能量—水分平衡分析中的应用
1
2008
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
Asynchronous data assimilation with the EnKF
1
2010
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
Robust ensemble filtering and its relation to covariance inflation in the ensemble Kalman filter
1
2011
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
Relation between two common localisation methods for the EnKF
6
2011
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
... Bishop等[9 ] 于2001年提出ETKF方法,是针对适应性观测问题提出的一种数据同化方法,其理论推导是基于Kalman滤波理论和集合变换思想得出的,是一种次优的数据同化方法,与EnKF方法[17 ] 不同之处在于:ETKF方法利用集合变换和无量纲化的思想,求解与观测有关的预报误差协方差矩阵[19 ] .ETKF方法是通过将预报扰动乘以一个变换矩阵T 来得到分析扰动.如下式: ...
... 在研究同化的基本性能时,多数研究者[17 ,25 ] 采用由Gaspari等[26 ] 于1999年提出的过滤函数(GC函数)做局地化处理,其中GC函数是一个五阶分段的有理函数,它依赖于长度尺度参数,并随着距离单调下降的函数[27 ] .因此,为了获得更好的同化效果,采用耦合模糊控制的局地化方法,在已有的数据库和规则库的情况下,通过高斯函数对局地化系数coeffs进行模糊化处理,设置恰当的隶属度函数,预先设定好适当的观测权重进行决策,然后解模糊化,最后将获得各种模糊的变化量和各种控制量转换成能够用于实践操控中的清晰量.图1 给出结合模糊控制的同化系统原理图. ...
... 对于数据同化而言,卡尔曼滤波方程的状态更新如下[17 ] : ...
... 由于在同化过程中,采用传播减小因子kσ 来评估同化强度[17 ] ,其表达式如下: ...
... 公式(25)中,σ 与R 有关,若R 变大,σ 值变小,当且仅当kσ -1<<1时,引用Sakov等[17 ] 对同化强度的定义,此时,同化强度为“弱”同化,即在状态变量的更新过程中观测信息占的权重远小于模型预测信息,观测数据的贡献较少.若R 越小,σ 值越大,当且仅当kσ -1>>1时,同化强度定义为“强”同化,即在状态变量的更新过程中观测信息占的权重远大于模型预测信息,引入了较多的观测信息.但在R 和σ 变化过程中,有一个临界值,使得当R 值与σ 值变化到kσ -1≈1时,同化强度定义为“中”同化,即观测信息和预测信息权重相当[23 ] . ...
Observation quality control with a robust ensemble Kalman filter
1
2013
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
基于Lorenz-96模型的顺序数据同化方法比较研究
2
2013
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
... Bishop等[9 ] 于2001年提出ETKF方法,是针对适应性观测问题提出的一种数据同化方法,其理论推导是基于Kalman滤波理论和集合变换思想得出的,是一种次优的数据同化方法,与EnKF方法[17 ] 不同之处在于:ETKF方法利用集合变换和无量纲化的思想,求解与观测有关的预报误差协方差矩阵[19 ] .ETKF方法是通过将预报扰动乘以一个变换矩阵T 来得到分析扰动.如下式: ...
基于Lorenz-96模型的顺序数据同化方法比较研究
2
2013
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
... Bishop等[9 ] 于2001年提出ETKF方法,是针对适应性观测问题提出的一种数据同化方法,其理论推导是基于Kalman滤波理论和集合变换思想得出的,是一种次优的数据同化方法,与EnKF方法[17 ] 不同之处在于:ETKF方法利用集合变换和无量纲化的思想,求解与观测有关的预报误差协方差矩阵[19 ] .ETKF方法是通过将预报扰动乘以一个变换矩阵T 来得到分析扰动.如下式: ...
On the choice of an optimal localization radius in ensemble kalman filter methods
1
2014
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
模式时间关联误差对集合平方根滤波估算土壤湿度的影响
1
2015
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
模式时间关联误差对集合平方根滤波估算土壤湿度的影响
1
2015
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
耦合模糊控制算法的数据同化观测误差处理方法
6
2017
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
... 在同化过程中,通过局地化方法可以改善有限集合数下的虚假相关问题,但是如何对观测位置和状态更新位置进行模糊控制,图2 给出了观测位置与状态位置的距离经过模糊控制后的同化示意图[22 ] ,其中“红七角星”为状态更新位置,“蓝五角星”为观测位置.传统局地化同化方案基于顺序滤波,在局地化区域(图2 中红正方形区域)的中心格点通过状态变量和所有观测数据依次循环演进到所有分析网格,且每个分析网格相互独立[28 ,29 ] .新方法在状态估计更新之前,首先计算状态更新点与所有观测之间的物理距离;然后通过模糊控制对状态更新位置与观测位置之间距离进行模糊量化,确定观测点的权重,距离状态更新位置越近,观测点的权重越大,反之亦然[22 ] . ...
... [22 ]. ...
... 观测位置与状态之间模糊控制同化示意图[22 ] ...
... Diagram of assimilation system coupled with the fuzzy control between observation position and status[22 ] ...
... 模糊控制过程包括模糊变量的定义(状态空间中2个背景向量之间的距离 dist)、模糊集合(权重)和模糊隶属度函数(选取三角形隶属度函数),根据模糊条件(if……then)描述观测点与状态更新网格点之间欧氏距离和权重之间的映射关系[25 ] ,构造出的模糊控制器能够通过模糊控制方案得到每一观测点权重,计算状态并更新向量[22 ] .因此设计过程具体如下: ...
耦合模糊控制算法的数据同化观测误差处理方法
6
2017
... 传统的卡尔曼滤波是一种适用于线性滤波及预测问题的顺序数据同化算法[1 ] ,但对于状态维数高的非线性系统,其应用受到很大的限制[2 ] .Evensen[3 ] 于1994年将集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)方法应用到地球科学领域,但很多研究人员关注的是其非线性问题的适应性和运算的高效性[4 ,5 ,6 ] .在实际数据同化应用中,EnKF方法是一种次优滤波.因此,相关学者提出了确定性卡尔曼滤波(Deterministic Ensemble Kalman Filter,DEnKF)、集合均方根滤波(Ensemble Square Root Filter,ESRF)和集合转换卡尔曼滤波(Ensemble Transform Kalman Filter,ETKF)[7 ,8 ,9 ] 等.在同化过程中,观测误差往往通过背景场误差的协方差矩阵传递空间相关信息到最终的同化分析结果中,有限的集合数会带来滤波发散以及远距离的虚假相关等问题.鉴于上述问题,Houtekamer等[10 ] 于2001年使用Schur乘积的局地化方法对协方差矩阵进行距离上的压缩;Whitaker等[8 ] 于2002年提出了一种权重函数,实验表明其比局地化裁剪函数能获得更好的结果;Anderson[11 ] 于2007年提出了自适应局地化,用以更好地消除变量之间的伪相关;同年,Miyoshi 等[12 ] 提出了局地化分析同化方法(Local Ensemble Transform Kalman Filter,LETKF)对观测点与状态更新点的距离做出了精确计算,解决了在状态更新的同时由于区域的真实观测而导致分析的不连续问题;韩旭军等[13 ] 于2008年针对应用广泛的EnKF和粒子滤波应用中存在的问题,提出了对非线性滤波方法中的平方根EnKF以及粒子滤波算法的改进;同年,周剑等[14 ] 验证了EnKF算法在改进模型对土壤水分和冻土深度的计算效果,为在高寒冻土地区利用多源信息进行融合监测提供了理论基础;Sakov等[15 ] 于2010年在EnKF的异步数据同化中提到了背景协方差局地化方法局地化方法;Luo等[16 ] 于2011年提出采用 H ∞ H ∞ [17 ] 利用正弦谐波函数提出协方差局地化(Covariance Localization,CL)和局地化分析(Local Analysis,LA)2种方法,经过验证2种方法能够产生相似的结果,但是对两者的比较没有进行严格的说明;Roh等[18 ] 于2013年提出了用鲁棒集合卡尔曼滤波(Robust Ensemble Kalman Filter,REnKF)对2种观测误差(统计异常观测误差和更新异常观测误差)进行处理,验证了在2种观测误差下REnKF能够改善滤波性能,减少异常值;摆玉龙等[19 ] 详细地比较了DEnKF,ETKF和EnKF在不同集合数目、观测数目、误差放大因子以及定位半径变化时的性能,指出DEnKF的同化效果优于ETKF和EnKF;Kirchgessner 等[20 ] 于2014年提出了在EnKF中通过区域局地化(Domain Localization,DL)和观测局地化(Observation Localization,OL)方法如何选择最优的局地化半径,提出在观测权重是固定值的情况下OL的效果优于DL;毛伏平等[21 ] 于2015年将集合平方根滤波与状态增广方法相结合,同时对更新状态变量和订正模式偏差的观测系统进行模拟,得出这2种方法的结合对土壤湿度估算精度有了明显提高.尽管这些算法改善了同化效果,避免了观测变量和状态更新之间的虚假相关,但在实际应用中,因不同的选择,这些算法需改进,因而卢勇男等[22 ] 于2017年提出了耦合模糊控制的同化方法,在ETKF平台上,结合模糊控制,对比了LETKF算法,验证了模糊控制同化(Fuzzy control with Ensemble Transform Kalman Filter,FETKF)方法的有效性,但是局地化方法在同化过程中变化幅度比较大,在强非线性情形下,其同化效果不明显.因而,耦合模糊控制方案的优化,与在强非线性情形下的测试,还需进一步研究. ...
... 在同化过程中,通过局地化方法可以改善有限集合数下的虚假相关问题,但是如何对观测位置和状态更新位置进行模糊控制,图2 给出了观测位置与状态位置的距离经过模糊控制后的同化示意图[22 ] ,其中“红七角星”为状态更新位置,“蓝五角星”为观测位置.传统局地化同化方案基于顺序滤波,在局地化区域(图2 中红正方形区域)的中心格点通过状态变量和所有观测数据依次循环演进到所有分析网格,且每个分析网格相互独立[28 ,29 ] .新方法在状态估计更新之前,首先计算状态更新点与所有观测之间的物理距离;然后通过模糊控制对状态更新位置与观测位置之间距离进行模糊量化,确定观测点的权重,距离状态更新位置越近,观测点的权重越大,反之亦然[22 ] . ...
... [22 ]. ...
... 观测位置与状态之间模糊控制同化示意图[22 ] ...
... Diagram of assimilation system coupled with the fuzzy control between observation position and status[22 ] ...
... 模糊控制过程包括模糊变量的定义(状态空间中2个背景向量之间的距离 dist)、模糊集合(权重)和模糊隶属度函数(选取三角形隶属度函数),根据模糊条件(if……then)描述观测点与状态更新网格点之间欧氏距离和权重之间的映射关系[25 ] ,构造出的模糊控制器能够通过模糊控制方案得到每一观测点权重,计算状态并更新向量[22 ] .因此设计过程具体如下: ...
集合转换卡尔曼滤波同化的一种分析方案
3
2015
... LETKF通过裁剪相关系数矩阵[23 ] 得到,其理论部分推导公式如下: ...
... 结果显示:在F ∈[4,5,…,12]时,4种算法的RMSE值都大于F =8时的值,说明当F 值偏离8越大时,4种算法得到的分析误差越大,模型误差越大,同化效果不明显[23 ] . ...
... 公式(25)中,σ 与R 有关,若R 变大,σ 值变小,当且仅当kσ -1<<1时,引用Sakov等[17 ] 对同化强度的定义,此时,同化强度为“弱”同化,即在状态变量的更新过程中观测信息占的权重远小于模型预测信息,观测数据的贡献较少.若R 越小,σ 值越大,当且仅当kσ -1>>1时,同化强度定义为“强”同化,即在状态变量的更新过程中观测信息占的权重远大于模型预测信息,引入了较多的观测信息.但在R 和σ 变化过程中,有一个临界值,使得当R 值与σ 值变化到kσ -1≈1时,同化强度定义为“中”同化,即观测信息和预测信息权重相当[23 ] . ...
集合转换卡尔曼滤波同化的一种分析方案
3
2015
... LETKF通过裁剪相关系数矩阵[23 ] 得到,其理论部分推导公式如下: ...
... 结果显示:在F ∈[4,5,…,12]时,4种算法的RMSE值都大于F =8时的值,说明当F 值偏离8越大时,4种算法得到的分析误差越大,模型误差越大,同化效果不明显[23 ] . ...
... 公式(25)中,σ 与R 有关,若R 变大,σ 值变小,当且仅当kσ -1<<1时,引用Sakov等[17 ] 对同化强度的定义,此时,同化强度为“弱”同化,即在状态变量的更新过程中观测信息占的权重远小于模型预测信息,观测数据的贡献较少.若R 越小,σ 值越大,当且仅当kσ -1>>1时,同化强度定义为“强”同化,即在状态变量的更新过程中观测信息占的权重远大于模型预测信息,引入了较多的观测信息.但在R 和σ 变化过程中,有一个临界值,使得当R 值与σ 值变化到kσ -1≈1时,同化强度定义为“中”同化,即观测信息和预测信息权重相当[23 ] . ...
EnKF同化的背景误差协方差矩阵局地化对比研究
1
2014
... 采用局地化分析方法对背景误差协方差处理可得到:LETKF方法可以消除背景误差协方差的矩阵的伪相关,减少远距离观测数据对更新状态变量的影响,同时,LETKF方法更新局部区域中心点的协方差,而其他非中心元素的协方差并不更新[24 ] . ...
EnKF同化的背景误差协方差矩阵局地化对比研究
1
2014
... 采用局地化分析方法对背景误差协方差处理可得到:LETKF方法可以消除背景误差协方差的矩阵的伪相关,减少远距离观测数据对更新状态变量的影响,同时,LETKF方法更新局部区域中心点的协方差,而其他非中心元素的协方差并不更新[24 ] . ...
Comparison of necessary conditions for typical Takagi-Sugeno and Mamdani fuzzy systems as universal approximators
2
1999
... 在研究同化的基本性能时,多数研究者[17 ,25 ] 采用由Gaspari等[26 ] 于1999年提出的过滤函数(GC函数)做局地化处理,其中GC函数是一个五阶分段的有理函数,它依赖于长度尺度参数,并随着距离单调下降的函数[27 ] .因此,为了获得更好的同化效果,采用耦合模糊控制的局地化方法,在已有的数据库和规则库的情况下,通过高斯函数对局地化系数coeffs进行模糊化处理,设置恰当的隶属度函数,预先设定好适当的观测权重进行决策,然后解模糊化,最后将获得各种模糊的变化量和各种控制量转换成能够用于实践操控中的清晰量.图1 给出结合模糊控制的同化系统原理图. ...
... 模糊控制过程包括模糊变量的定义(状态空间中2个背景向量之间的距离 dist)、模糊集合(权重)和模糊隶属度函数(选取三角形隶属度函数),根据模糊条件(if……then)描述观测点与状态更新网格点之间欧氏距离和权重之间的映射关系[25 ] ,构造出的模糊控制器能够通过模糊控制方案得到每一观测点权重,计算状态并更新向量[22 ] .因此设计过程具体如下: ...
Construction of correlation functions in two and three dimensions
1
1999
... 在研究同化的基本性能时,多数研究者[17 ,25 ] 采用由Gaspari等[26 ] 于1999年提出的过滤函数(GC函数)做局地化处理,其中GC函数是一个五阶分段的有理函数,它依赖于长度尺度参数,并随着距离单调下降的函数[27 ] .因此,为了获得更好的同化效果,采用耦合模糊控制的局地化方法,在已有的数据库和规则库的情况下,通过高斯函数对局地化系数coeffs进行模糊化处理,设置恰当的隶属度函数,预先设定好适当的观测权重进行决策,然后解模糊化,最后将获得各种模糊的变化量和各种控制量转换成能够用于实践操控中的清晰量.图1 给出结合模糊控制的同化系统原理图. ...
小集合数条件下的数据同化策略研究
2
2015
... 在研究同化的基本性能时,多数研究者[17 ,25 ] 采用由Gaspari等[26 ] 于1999年提出的过滤函数(GC函数)做局地化处理,其中GC函数是一个五阶分段的有理函数,它依赖于长度尺度参数,并随着距离单调下降的函数[27 ] .因此,为了获得更好的同化效果,采用耦合模糊控制的局地化方法,在已有的数据库和规则库的情况下,通过高斯函数对局地化系数coeffs进行模糊化处理,设置恰当的隶属度函数,预先设定好适当的观测权重进行决策,然后解模糊化,最后将获得各种模糊的变化量和各种控制量转换成能够用于实践操控中的清晰量.图1 给出结合模糊控制的同化系统原理图. ...
... 式中:x 是状态估计;d 是观测向量;H 是观测矩阵,表示观测值与状态值之间的函数关系,它提供了从模型空间到观测空间的映射过程;P 是状态误差协方差;I 是单位矩阵;上标T是矩阵的转置;R 是观测误差协方差,也被称为非相关性误差,表示同一误差之间的相关性;m 表示集合数;E 是包含每个集合成员的列矩阵;A 是集合奇异值的矩阵;Pf 是预报误差协方差矩阵[27 ] . ...
小集合数条件下的数据同化策略研究
2
2015
... 在研究同化的基本性能时,多数研究者[17 ,25 ] 采用由Gaspari等[26 ] 于1999年提出的过滤函数(GC函数)做局地化处理,其中GC函数是一个五阶分段的有理函数,它依赖于长度尺度参数,并随着距离单调下降的函数[27 ] .因此,为了获得更好的同化效果,采用耦合模糊控制的局地化方法,在已有的数据库和规则库的情况下,通过高斯函数对局地化系数coeffs进行模糊化处理,设置恰当的隶属度函数,预先设定好适当的观测权重进行决策,然后解模糊化,最后将获得各种模糊的变化量和各种控制量转换成能够用于实践操控中的清晰量.图1 给出结合模糊控制的同化系统原理图. ...
... 式中:x 是状态估计;d 是观测向量;H 是观测矩阵,表示观测值与状态值之间的函数关系,它提供了从模型空间到观测空间的映射过程;P 是状态误差协方差;I 是单位矩阵;上标T是矩阵的转置;R 是观测误差协方差,也被称为非相关性误差,表示同一误差之间的相关性;m 表示集合数;E 是包含每个集合成员的列矩阵;A 是集合奇异值的矩阵;Pf 是预报误差协方差矩阵[27 ] . ...
Weight interpolation for efficient data assimilation with the Local Ensemble Transform Kalman Filter
1
2009
... 在同化过程中,通过局地化方法可以改善有限集合数下的虚假相关问题,但是如何对观测位置和状态更新位置进行模糊控制,图2 给出了观测位置与状态位置的距离经过模糊控制后的同化示意图[22 ] ,其中“红七角星”为状态更新位置,“蓝五角星”为观测位置.传统局地化同化方案基于顺序滤波,在局地化区域(图2 中红正方形区域)的中心格点通过状态变量和所有观测数据依次循环演进到所有分析网格,且每个分析网格相互独立[28 ,29 ] .新方法在状态估计更新之前,首先计算状态更新点与所有观测之间的物理距离;然后通过模糊控制对状态更新位置与观测位置之间距离进行模糊量化,确定观测点的权重,距离状态更新位置越近,观测点的权重越大,反之亦然[22 ] . ...
Efficient data assimilation for spatiotemporal chaos: A local ensemble transform Kalman Filter
1
2007
... 在同化过程中,通过局地化方法可以改善有限集合数下的虚假相关问题,但是如何对观测位置和状态更新位置进行模糊控制,图2 给出了观测位置与状态位置的距离经过模糊控制后的同化示意图[22 ] ,其中“红七角星”为状态更新位置,“蓝五角星”为观测位置.传统局地化同化方案基于顺序滤波,在局地化区域(图2 中红正方形区域)的中心格点通过状态变量和所有观测数据依次循环演进到所有分析网格,且每个分析网格相互独立[28 ,29 ] .新方法在状态估计更新之前,首先计算状态更新点与所有观测之间的物理距离;然后通过模糊控制对状态更新位置与观测位置之间距离进行模糊量化,确定观测点的权重,距离状态更新位置越近,观测点的权重越大,反之亦然[22 ] . ...
Optimal sites for supplementary weather observations: Simulation with a small model
1
1998
... Lorenz-96模型为强迫耗散模型,F 为控制混沌系统的强迫参数,当F >4时,其解为混沌状态[30 ] .改变强迫参数F 的值,改变模型的非线性程度,对比4种方法在不同强迫参数下的均方根误差.为了验证4种算法的性能,在实验中,选取强迫参数F 为4~12,间隔为1. ...
 , 摆玉龙
, 摆玉龙
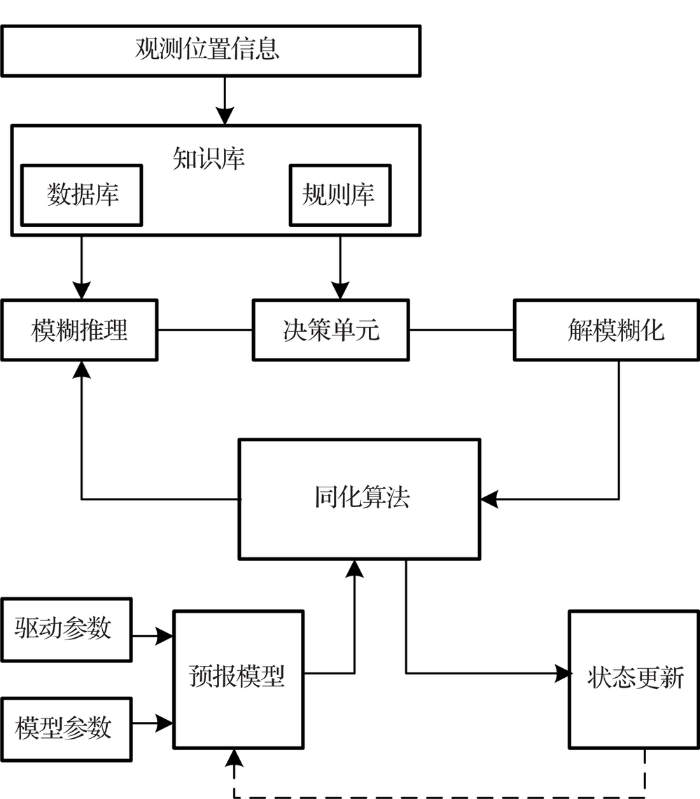
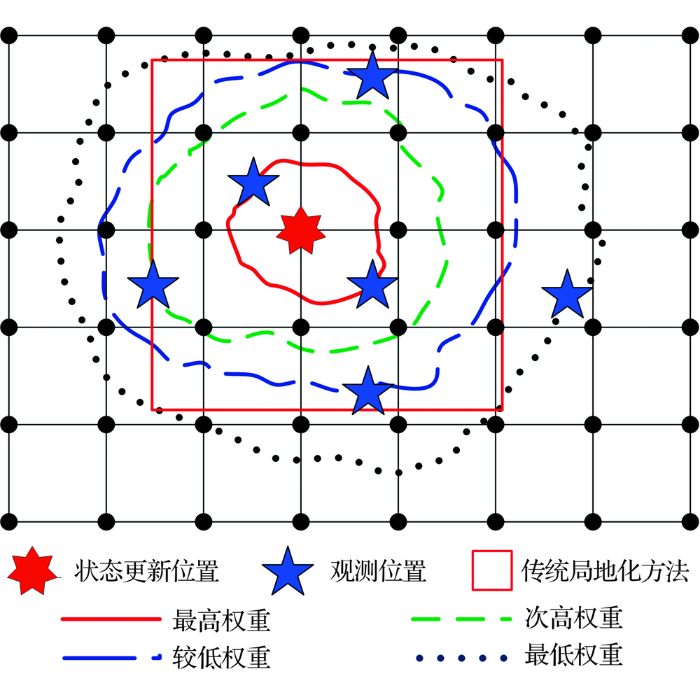
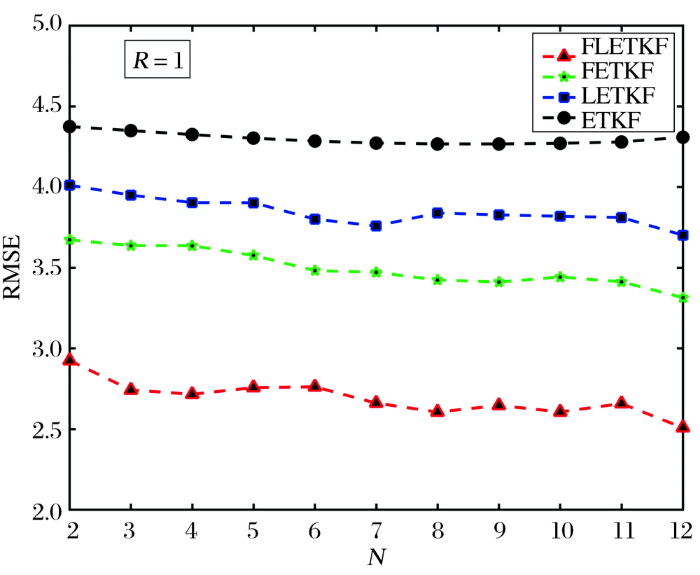
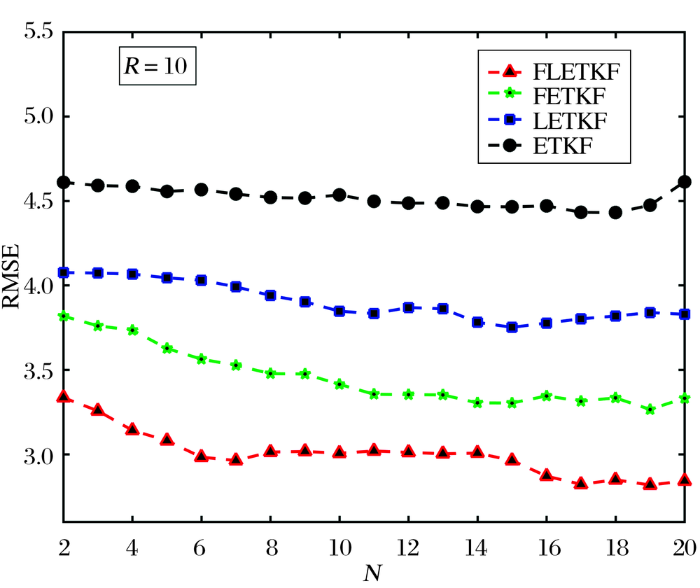
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}