1 引 言
重力仪是测量重力加速度的仪器。根据所测物理量的不同分为绝对重力仪和相对重力仪,根据测量方法的不同又分为静态重力仪和动态重力仪。海洋重力仪属于动态相对重力仪,可在动基座上对重力加速度变化量进行连续测量,为重力辅助惯性导航和资源勘探等提供高精度的重力数据[1 ,2 ] 。海洋重力仪根据重力敏感组件结构形式的不同分为摆杆型和轴对称型;根据核心测量元件的不同,又分为金属弹簧式、石英弹簧式、振弦式及磁浮式等多种类型。美国Micro-g LaCoste公司生产的Air-Sea Gravity System Ⅱ型海空重力仪是摆杆型金属弹簧重力仪的典型代表,这类海洋重力仪的优点是摆杆的机械放大作用使仪器能获得较高的灵敏度,缺点是易受水平向加速度的影响,动态测量时会产生交叉耦合效应,海况较差时测量精度难以保证;轴对称型海洋重力仪由于对称结构的优势,对水平向加速度不敏感,能适应各种海况的动态重力测量。该类仪器的典型代表有俄罗斯的GT系列海空重力仪、德国的KSS系列海洋重力仪以及中国科学院精密测量科学与技术创新研究院(原中国科学院测量与地球物理研究所)研制的CHZ-Ⅱ型海洋重力仪[3 ,4 ] 。
海洋重力仪工作时,除受到重力加速度的作用之外,还受到海浪引起的垂直扰动加速度、水平扰动加速度以及运动载体动力装置引起的结构振动作用[5 ] 。前者属于长周期大幅扰动,后者为高频振动,其幅值往往能达到数百伽,是海洋重力仪动态测量时的主要干扰来源[6 ,7 ] 。本文以中国科学院精密测量科学与技术创新研究院自主研制的CHZ-Ⅱ型海洋重力仪为研究对象,将测量原理及重力敏感结构特点相结合,建立海洋重力仪动态测量模型,分析载体垂向扰动对轴对称型金属弹簧海洋重力仪的影响机理。
2 CHZ-Ⅱ型海洋重力仪的测量模型
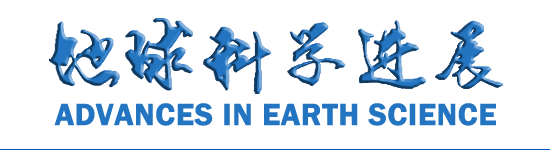
CHZ-Ⅱ型海洋重力仪采用的是一根垂直悬挂的金属弹簧下端连接一敏感质量,实质是一根弹簧秤(图1 )。其测量原理是基于牛顿第二定律,即力等于质量乘以加速度。如质量不变,则可以通过测量力代替加速度[8 ] 。其平衡方程为:
F = k l = m g (1)
式中:F 为弹簧张力,k l 为弹簧伸长量,m 为质量,g 为重力加速度。重力加速度发生变化时,上述平衡状态被破坏,敏感质量偏离原来的位置,设此时产生的位移为x ,则有:
k x = m ∆ g (2)
x = m k ∆ g (3)
式中:k 为弹簧刚度,∆ g m 为质量。通过检测弹簧的微小位移x ,就可以测出重力的相对变化,弹簧因重力变化而引起的微小位移通过电容动极板与定极板组成的高精度电容位移传感器获得[9 ] 。
图1
图1
CHZ-Ⅱ 型海洋重力仪测量原理示意图
Fig.1
Diagram of the measuring principle of CHZ-Ⅱ marine gravimeter
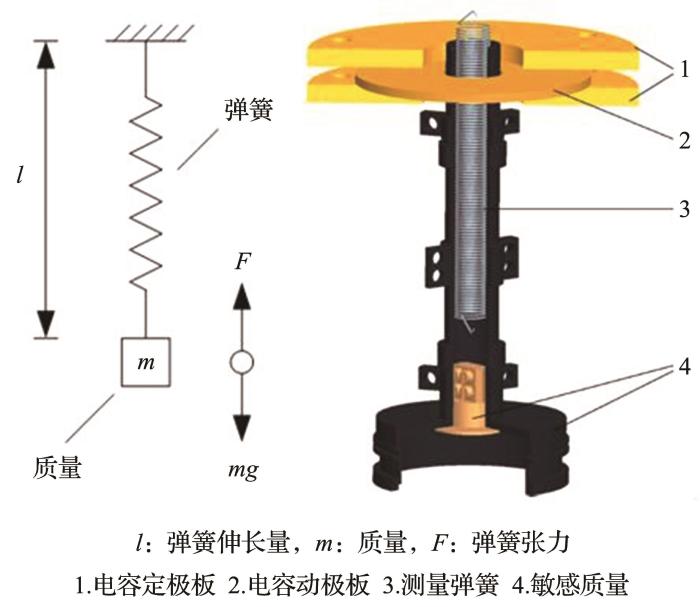
在动态重力测量过程中,仪器不可避免地受到来自载体的扰动加速度的作用,为消除水平扰动加速度的影响,CHZ-Ⅱ型海洋重力仪的敏感质量在水平方向被拉丝和绷簧所约束,使之只有一个沿其自身轴线平移的自由度(图2 )[10 ] 。由于这种结构与仪器的敏感轴对称,故称为轴对称型重力仪。设在平衡位置时每根拉丝的拉力均为T 0 3 T 0 x 的同时绕其轴线产生小角度转动。此时,拉丝及绷簧上的拉力均发生变化,设拉丝拉力为T ,则绷簧张力为3T ,设拉丝长度为L ,公式(2)应修正为:
k x + 12 T s i n x L = m Δ g (4)
图2
图2
拉丝及绷簧结构示意图
Fig.2
Diagram of the filaments and tension springs
当位移x 足够小时,可认为s i n x L = x L T = T 0 公式(4)可得:
( k + 12 T 0 L ) x = m Δ g (5)
式中:k 为弹簧刚度,T 0 为敏感质量处于平衡位置时每根拉丝的拉力,L 为拉丝长度,m 为质量,∆g 为重力加速度变化量。
定义k e = k + 12 T 0 L x 仍然与Δ g
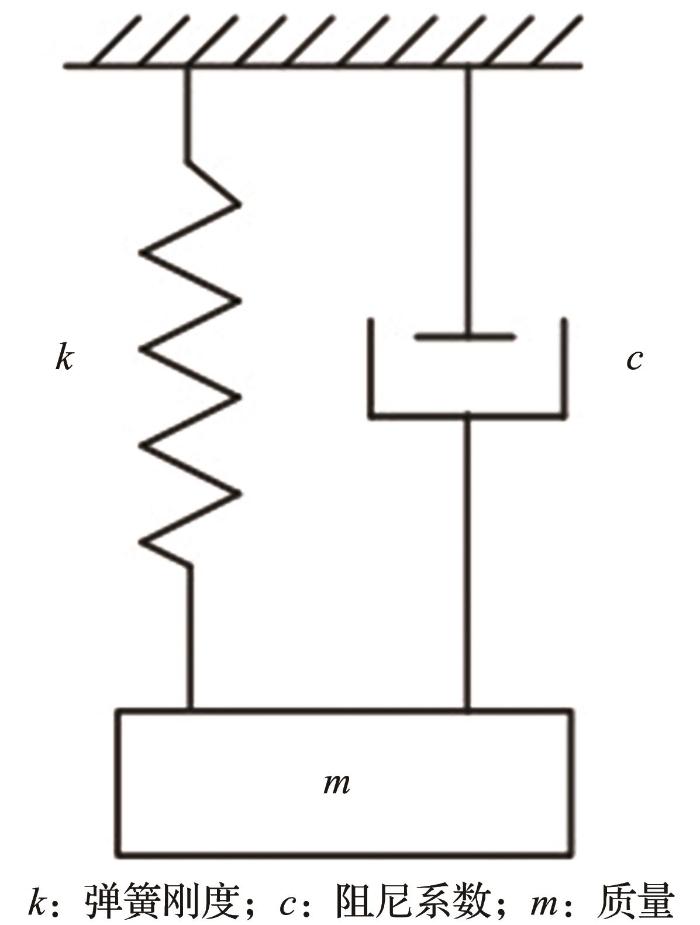
为抑制来自载体的垂直扰动加速度,通常会在重力仪内部设置适当的阻尼,使重力敏感单元成为典型的弹簧—质量—阻尼系统(图3 )。
图3
图3
CHZ-Ⅱ 型重力仪重力敏感单元力学模型
Fig.3
Mechanical model of the gravity sensitive part of the CHZ-Ⅱ gravimeter
设在外力作用下敏感质量偏离平衡位置产生的位移为x ,则敏感质量上所受的力包含惯性力m x ¨ k e x m Δ g m z ¨ 0 s i n ( ω z t + δ ) c x ˙
m Δ g + m z ¨ 0 s i n ( ω z t + δ ) - k e x - c x ˙ = m x ¨ (6)
x ¨ + 2 λ x ˙ + ω 0 2 x = Δ g + z ¨ 0 s i n ( ω z t + δ ) (7)
式中:x ¨ x x ˙ x 2 λ = c m ω 0 = k e / m z ¨ 0 s i n ( ω z t + δ )
X = 1 ω 0 2 Δ g + 1 ( ω 0 2 - ω z 2 ) 2 + 4 λ 2 ω z 2 z ¨ 0 s i n ( ω z t + δ + β ) (8)
从公式(8)可看出,金属弹簧海洋重力仪敏感质量的位移量x 不仅是重力加速度变化量Δ g z ¨ 0 s i n ( ω z t + δ ) [4 ] 。
3 载体垂向扰动对重力仪的影响
3.1 载体扰动特征
海洋重力仪的重力敏感单元在动态测量过程中除受上述测量弹簧拉力、拉丝及绷簧拉力和重力作用之外,还受到来自载体的垂向和水平向扰动加速度的作用。但由于敏感质量是垂直悬挂的,在水平方向的自由度被拉丝和绷簧约束,且在陀螺平台的作用下重力敏感轴始终处于铅垂方向,所以包括CHZ-Ⅱ型重力仪在内的轴对称型海洋重力仪均对水平扰动加速度不敏感,垂直扰动加速度才是对测量精度产生不利影响的最直接因素。
来自载体的垂向扰动主要分为两大类:一是海浪引起的超低频大幅扰动,另一类则是载体动力装置引起的高频振动。海浪引起的垂直扰动加速度周期通常为6~10 s,在平静海况下的幅值大约为15 Gal(1 Gal=1×10-2 m/s2 );在风力2~3级,浪高小于1 m的一般海况下,幅值为80~100 Gal;而在风力4~7级、浪高数米的恶劣海况下幅值能达到200 Gal[4 ] 。
海洋重力仪的载体——测量船的动力装置自身质量较大,内部存在偏心质量,运转时会产生不平衡力,是海洋重力仪动态测量环境高频扰动的主要来源。测量船通常采用中速柴油发动机,以6L23/30型6缸中速柴油发动机为例,其额定功率为810 kW,额定转速为825 r/min(此时主机激振力频率为41.25 Hz)。对安装该型发动机的船体基座进行模态分析和实况测试,结果表明其各阶模态频率范围为13.5~100 Hz,最大加速度幅值为数百伽(Gal)[11 ] 。
3.2 载体垂向扰动对重力仪电容微位移检测的影响
CHZ-Ⅱ型海洋重力仪敏感质量的位移是由差动电容来检测的。在电容位移传感器中,传感器对微位移的测量是衡量电容位移传感器最重要的指标之一,直接关系到电容位移传感器的整体性能。电容位移传感器对微位移的测量越精确、响应速度越快、非线性越小,整体性能就越好[12 ] 。
CHZ-Ⅱ型海洋重力仪的电容测微器由2个定极板和1个动极板组成,动极板位于2个定极板之间,并与敏感质量固定连接。当重力异常或有垂直扰动加速度作用于敏感质量时,敏感质量产生位移,使得动极板与定极板之间的间距发生变化,进而引起电容的变化,经锁相放大及相敏检波将其转换成电压信号进行测量(图4 )。
图4
图4
CHZ-Ⅱ 电容微位移测量示意图
Fig.4
Diagrammatic sketch of the capacitance micro displacement measuring system of CHZ-Ⅱ
理论分析表明,当极板间充满同一种介质时,平行板电容器的电容C 可表示为:
C = ξ ξ 0 S d (9)
式中:ξ为相对介电常数,ξ0 为真空介电常数,S 为极板的正对面积,d 为极板间距。
初始状态下,动极板位于2个定极板的正中间,设在受到垂直方向加速度作用时动极板产生向下的位移为x ,则上、下两部分电容C 1 和C 2 分别为:
C 1 = ξ ξ 0 S d + x C 2 = ξ ξ 0 S d - x (10)
Δ C = C 2 - C 1 = 2 ξ ξ 0 S x d 2 - x 2 (11)
Δ C = C 2 - C 1 = 2 ξ ξ 0 S x d 2 (12)
即当动极板的位移x 与极板间距d 相比很小时,可认为电容的变化量与位移成正比。
由于受到空间和重量的限制,CHZ-Ⅱ型海洋重力仪的测量弹簧设计为在一个重力加速度g (约等于106 mGal)的作用下伸长量为100 mm,则根据公式(2),可得出仅在测量弹簧的作用下,位移传感的格值为m /k =0.1 μm/mGal,而在动态测量过程中,拉丝和绷簧在限制水平向自由度的同时也增大了重力敏感单元在垂向的刚度,即ke =k +12T 0 /L ≈10k (根据实验测得),因此,对于重力敏感单元而言,位移传感的格值为m /10k =0.01 μm/mGal。为满足仪器0.01 mGal的分辨率要求,意味着电容测微的灵敏度需达到10-4 μm,根据公式(12),并将S =2×10-3 m2 ,d =5×10-4 m等参数代入,可得出10-4 μm的位移所对应的电容变化量在10-6 pF量级。
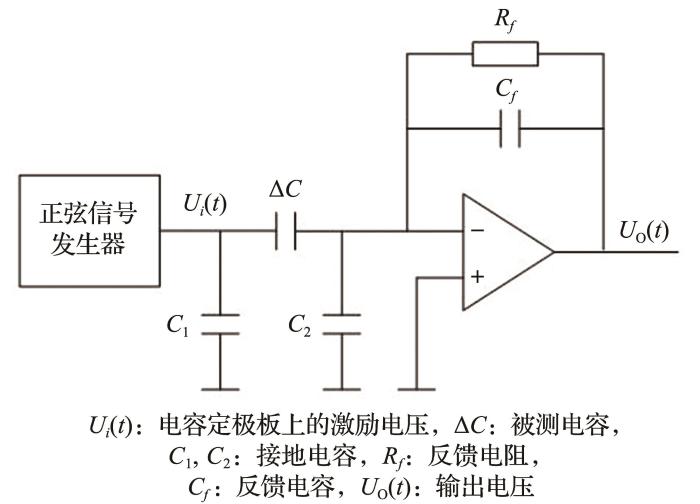
为了准确检测如此小的电容变化,CHZ-Ⅱ型海洋重力仪采用了交流锁相放大电路,将微小的电容变化转换为电压变化(图5 )。图5 中的Ui (t) 表示作用在电容定极板上的激励电压,为正弦信号,Rf 为反馈电阻,Cf 为反馈电容,C 1 和C 2 表示接地电容,U O ( t ) △C 经该检测电路后表现为电压的变化,且有:
Fig.5
The capacitance detection circuit
U O ( t ) = - j ω R f Δ C 1 + j ω R f C f U i ( t ) (13)
U O ( t ) = - Δ C C f U i ( t ) (14)
即检测电路的输出电压与被测电容变化量成正比。结合公式(12)和公式(14)电容检测电路的相关参数可得出10-4 μm的位移对应的差动电容检测电路输出电压变化为2 μV,而10-4 μm的位移对应的加速度变化为0.01 mGal,因此,电容微位移检测的格值为0.2 mV/mGal。
电容微位移检测输出电压的动态范围为±10 V,根据0.2 mV/mGal的格值,在开环无阻尼状态下,当扰动加速度幅值超过50 Gal时,电容测微的输出电压将达到10 V的饱和态,造成采样失真,仪器就不能正常工作了。这也正是所有的海洋重力仪都采用强阻尼对垂直扰动加速度进行大幅压缩的原因。
3.3 载体垂向扰动对重力仪非线性误差的影响
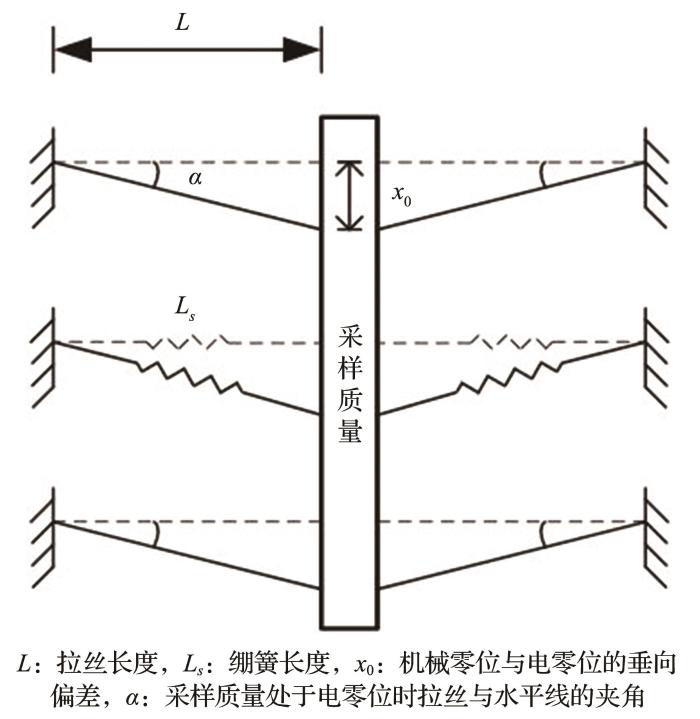
非线性误差定义为海洋重力仪在静态所测得的重力值与动态所测得的重力值的差值。从测量原理上来说,轴对称型海洋重力仪的敏感轴是与重力及垂直扰动加速度的轴线相重合的,理论上不存在非线性误差,但实际上,非线性误差不可避免地存在。原因主要包括以下几个方面:一是测量弹簧本身的非线性,即弹簧的刚度并不是一个常数,导致弹簧的伸长率与所受力之间并不严格成比例关系;二是用于限制敏感质量水平向运动的拉丝和绷簧(图6 )并不是严格水平的,敏感质量发生垂向位移时,拉丝及绷簧上的拉力在垂直方向的分量呈非线性变化;三是用于检测敏感质量位移的差动电容极板不平行引起的非线性。其中,测量弹簧本身非线性及电容极板不平行引起的非线性误差通常在10-8 ~10-6 mGal量级,对于动态精度1 mGal的重力仪而言可忽略不计,而拉丝和绷簧的不水平是仪器产生非线性误差的主要原因[13 ] 。拉丝和绷簧的不水平通常表现为安装时机械零位与电零位不重合引起的拉丝和绷簧整体向某一方向偏移。
图6
图6
机械零位与电零位不重合时拉丝及绷簧的形态
Fig.6
The form of the filaments and tension springs when the mechanical zero position does not coincide with the electrical zero position
所谓的机械零位是指敏感质量被锁定时所处的位置,由于拉丝和绷簧是在敏感质量被锁定时安装的,故拉丝和绷簧在敏感质量处于机械零位时完全水平(图6 中虚线所示);而电零位是差动电容输出为零时敏感质量所处的位置(图6 中实线所示)。
设拉丝长度为L ,绷簧刚度为ks ,敏感质量处于机械零位时绷簧长度为Ls ,机械零位与电零位的垂向偏差为x 0
∑ F i 0 = k s ( L s + x 0 2 + L 2 - L ) (15)
当垂向加速度作用于敏感质量时,敏感质量产生垂向位移△x 并沿其轴线产生小角度转动,导致拉丝和绷簧上的张力发生变化,此时有:
∑ F i = k s L s + ( x 0 + Δ x ) 2 + L 2 - L (16)
由于( 1 + β ) λ = 1 + λ β + λ ( λ - 1 ) β 2 2 ! 公式(16)并略去高次项可得:
∑ F i = k s L s + ( x 0 + Δ x ) 2 + L 2 - L ≈ k s L s + L 2 ( x 0 + Δ x L ) 2 (17)
∑ F i ≈ ∑ F i 0 + k s ( 2 x 0 Δ x + Δ x 2 ) 2 L (18)
在沿敏感质量轴线方向上,拉丝和绷簧的张力可表示为:
∑ F i s i n α = k e ( x 0 + Δ x ) (19)
式中:k e α 角很小时,有α = x 0 + Δ x L 公式(19),得∑ F i s i n α = k e L α s i n α α
k e ≈ Σ F i L ( 1 - α 2 3 ! ) (20)
k e ≈ ∑ F i 0 + k s ( 2 x 0 Δ x + Δ x 2 ) 2 L × 1 - ( x + Δ x ) 2 3 ! L 2 × 1 L (21)
由此可见,弹性敏感系统的刚度k e x 的函数。设垂直加速度作用于敏感质量时敏感质量产生的位移为x ,则重力仪的输出△a 可表示为:
Δ a = F x - F x 0 m = k s ( 2 x 0 x + x 2 ) 2 L 2 ( x 0 + x ) + ∑ F i 0 L x
- ∑ F i 0 L ( 2 x 0 x + x 2 ) 3 ! L 2 ( x 0 + x ) × 1 m (22)
根据轴对称型金属弹簧海洋重力仪的测量原理[14 ] ,△a 表达式中的一次项和三次项在正弦扰动的一个周期内积分为零,通过低通滤波后并不贡献测量误差,只有二次项贡献测量误差,因此:
Δ a e r r = ( 3 k s L - ∑ F i 0 ) 2 m L 3 x 0 x 2 (23)
从公式(23)可看出,非线性误差Δ a e r r 公式(8),可得出载体垂向扰动加速度与重力仪非线性误差的关系:对于参数固定的某台重力仪而言,载体垂向扰动加速度是非线性误差的直接决定因素,扰动加速度幅值越大,频率越高,引起的非线性误差越大。
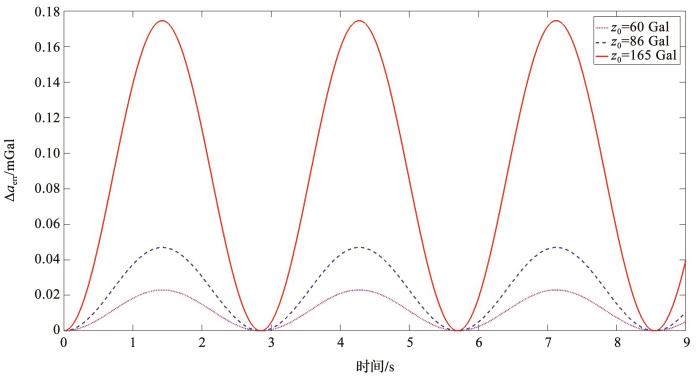
以CHZ-Ⅱ型海洋重力仪为例,将参数ks =2 200 N/m,L =0.05 m,∑F 0 =0.3 N/m,m =0.033 kg,x 0 =3×10-5 m,ω 0 =30 rad/s,ωz =1.1 rad/s以及阻尼系数λ =19 500代入公式(8)和公式(23),并将载体垂向扰动加速度幅值分别设置为60、86和165 Gal,得出的不同扰动加速度幅值对应的非线性误差如图7 所示。
图7
图7
不同扰动加速度幅值对应的非线性误差
Fig.7
Nonlinear errors corresponding to different disturbance acceleration amplitudes
从图7 可以看出,垂向扰动加速度频率一定时,其幅值越大,引起的非线性误差越大;对于动态测量精度要求为1 mGal的CHZ-Ⅱ型海洋重力仪而言,当阻尼系数足够大时,即使在恶劣海况下(165 Gal的垂向扰动幅值)仍能进行有效测量。
同理,使垂向扰动加速度的幅值保持165 Gal不变,改变垂向扰动加速度的频率ω z ,可得出不同频率下非线性误差的特性如图8 所示。
图8
图8
不同扰动加速度频率对应的非线性误差
Fig.8
Nonlinear errors corresponding to different disturbance acceleration frequencies
从图8 可看出,对CHZ-Ⅱ型海洋重力仪而言,当垂向扰动加速度幅值一定时,其频率越高,引起的非线性误差越大;而一般来说,风浪比涌浪的频率高,因此,图8 的结果还表明CHZ-Ⅱ型海洋重力仪动态测量时更易受风浪的影响。
4 结 论
(1) 对于轴对称型金属弹簧海洋重力仪而言,载体垂向扰动直接影响电容微位移检测的功能实现。在开环无阻尼状态下,载体垂向扰动加速度大于50 Gal时,电容位移检测的输出电压将处于饱和失真状态,导致CHZ-Ⅱ型重力仪不能正常工作。
(2) 载体垂向扰动加速度是海洋重力仪非线性误差的直接决定因素,对于参数固定的重力仪而言,扰动加速度幅值越大,频率越高,引起的非线性误差越大。
(3) 增大重力敏感系统的阻尼可实现对敏感质量位移的大幅衰减,从而可提高电容位移检测的动态范围,以确保在垂向扰动加速度达数百伽时仪器仍能正常工作。
(4) 提高重力传感器的装配精度,严格控制机械零位与电零位的偏差值x 0 ,可在一定程度上减弱载体垂向扰动对仪器非线性误差的贡献。
参考文献
View Option
[1]
HU Pinghua ZHAO Ming HUANG He et al Review on the development of airbone/marine gravimetry instruments
[J]. Navigation Positioning&Timing , 2017 , 4 (4 ): 10 -19 .
[本文引用: 1]
胡平华 , 赵明 , 黄鹤 ,等 航空/海洋重力测量仪器发展综述
[J]. 导航定位与授时 , 2017 , 4 (4 ):10 -19 .
[本文引用: 1]
[2]
FANG Fengzhou GU Chunyang Measurement principle and developmentstatus of high precision gravimeters
[J]. Chinese Journal of Scientific Instrument , 2017 , 38 (8 ): 1 830 -1 838 .
[本文引用: 1]
房丰洲 , 顾春阳 高精度重力仪的测量原理与发展现状
[J]. 仪器仪表学报 , 2017 , 38 (8 ): 1 830 -1 838 .
[本文引用: 1]
[3]
ZHANG Xiangyu GUAN Yongxian XU Xing et al Some question about data processing of GT-2M marine gravimeter
[J]. Hydrographic Surveying and Charting , 2017 , 37 (1 ): 30 -33 .
[本文引用: 1]
张向宇 , 关永贤 , 徐行 , 等 GT-2M型海洋重力仪数据处理若干问题的讨论
[J]. 海洋测绘 , 2017 , 37 (1 ): 30 -33 .
[本文引用: 1]
[4]
HUANG Motao ZHAI Guojun GUAN Zheng et al The determination and application of marine gravity field [M]. Beijing : Surveying and Mapping Press , 2005 .
[本文引用: 3]
黄谟涛 , 翟国君 , 管铮 , 等 海洋重力场测定及其应用 [M]. 北京 : 测绘出版社 , 2005 .
[本文引用: 3]
[5]
LIU Ruozeng On the liquid damping of CHZ sea gravimeter
[J]. Acta Geodaetica et Geophysica ,1986 (8 ): 113 -118 .
[本文引用: 1]
刘若曾 CHZ海洋重力仪的液体阻尼
[J]. 测量与地球物理集刊 ,1986 (8 ): 113 -118 .
[本文引用: 1]
[6]
ZHANG Shanyan LI Xiqi LIANG Chujian et al Newly developed CHZ sea gravimeter
[J]. Acta Geodetica et Cartographica Sinica , 1987 , 16 (1 ): 1 -6 .
[本文引用: 1]
张善言 ,李锡其 ,梁础坚 , 等 新研制的CHZ海洋重力仪
[J]. 测绘学报 ,1987 ,16 (1 ): 1 -6 .
[本文引用: 1]
[7]
FAN Weiguang Research of the detecting and controlling scheme for the zero length spring-based sea-gravimeter
[D]. Nanjing : Southeast University , 2003 .
[本文引用: 1]
范维光 零长弹簧海洋重力仪测控技术研究
[D]. 南京 : 东南大学 , 2003 .
[本文引用: 1]
[8]
ZHANG Shanyan Several distinguishing features of the CHZ sea gravimeter
[J]. Acta Geodaetica et Geophysica ,1991 (12 ): 93 -102 .
[本文引用: 1]
张善言 CHZ海洋重力仪的若干特点
[J]. 测量与地球物理集刊 ,1991 (12 ): 93 -102 .
[本文引用: 1]
[9]
HU Ming TU Haibo LIU Lintao et al Design and realization of the control system digitalization for the CHZ sea gravimeter
[J]. Navigation and Control , 2016 , 15 (4 ): 1 -7 .
[本文引用: 1]
胡明 , 涂海波 , 柳林涛 , 等 CHZ型重力仪控制系统的数字化设计与实现
[J]. 导航与控制 , 2016 , 15 (4 ): 1 -7 .
[本文引用: 1]
[10]
TU Haibo HE Jiangang LIU Leijun et al Performance characteristics for the g-sensitive elastic structure of CHZ-Ⅱ sea gravimeter
[J]. Journal of Geodesy and Geodynamics , 2015 , 35 (4 ): 711 -714 .
[本文引用: 1]
涂海波 , 何建刚 , 刘雷钧 , 等 CHZ-Ⅱ海洋重力仪重力敏感结构的性能测试与分析
[J]. 大地测量与地球动力学 , 2015 , 35 (4 ): 711 -714 .
[本文引用: 1]
[11]
LIU Xiangdong PANG Fuzhen Study on the vibrant characteristic of base system of marine main engine
[J]. Marine Technology , 2009 (3 ): 36 -40 .
[本文引用: 1]
刘向东 , 庞福振 船用主机基座系统的振动特性研究
[J]. 造船技术 , 2009 (3 ): 36 -40 .
[本文引用: 1]
[12]
ZHU Pan Signal concersionand non-lnear correction of capacitive displacement sensor
[D]. Harbin : Harbin Institute of Technology , 2007 .
[本文引用: 1]
朱盼 电容位移传感器信号转换及非线性校正技术研究
[D]. 哈尔滨 : 哈尔滨工业大学 , 2007 .
[本文引用: 1]
[13]
ZONG Jie On the effect of dynamic non-linearity of CHZ sea gravimeter in dynamic gravity measurement
[J]. Acta Geodetica et Cartographica Sinica , 1987 (1 ):9 -18 .
[本文引用: 1]
宗杰 CHZ重力仪在动态重力测量中的非线性问题
[J]. 测绘学报 ,1987 (1 ): 9 -18 .
[本文引用: 1]
[14]
TU Haibo HU Ming DONG Qinqin et al Frequency-piecewise control scheme for the gravity measurement servo loop of the CHZ gravimeter
[J]. Navigation and Control , 2015 , 14 (2 ): 41 -45 .
[本文引用: 1]
涂海波 , 胡明 , 董琴琴 , 等 CHZ型重力仪重力测量伺服回路的分频段控制方案
[J]. 导航与控制 , 2015 , 14 (2 ): 41 -45 .
[本文引用: 1]
Review on the development of airbone/marine gravimetry instruments
1
2017
... 重力仪是测量重力加速度的仪器.根据所测物理量的不同分为绝对重力仪和相对重力仪,根据测量方法的不同又分为静态重力仪和动态重力仪.海洋重力仪属于动态相对重力仪,可在动基座上对重力加速度变化量进行连续测量,为重力辅助惯性导航和资源勘探等提供高精度的重力数据[1 ,2 ] .海洋重力仪根据重力敏感组件结构形式的不同分为摆杆型和轴对称型;根据核心测量元件的不同,又分为金属弹簧式、石英弹簧式、振弦式及磁浮式等多种类型.美国Micro-g LaCoste公司生产的Air-Sea Gravity System Ⅱ型海空重力仪是摆杆型金属弹簧重力仪的典型代表,这类海洋重力仪的优点是摆杆的机械放大作用使仪器能获得较高的灵敏度,缺点是易受水平向加速度的影响,动态测量时会产生交叉耦合效应,海况较差时测量精度难以保证;轴对称型海洋重力仪由于对称结构的优势,对水平向加速度不敏感,能适应各种海况的动态重力测量.该类仪器的典型代表有俄罗斯的GT系列海空重力仪、德国的KSS系列海洋重力仪以及中国科学院精密测量科学与技术创新研究院(原中国科学院测量与地球物理研究所)研制的CHZ-Ⅱ型海洋重力仪[3 ,4 ] . ...
航空/海洋重力测量仪器发展综述
1
2017
... 重力仪是测量重力加速度的仪器.根据所测物理量的不同分为绝对重力仪和相对重力仪,根据测量方法的不同又分为静态重力仪和动态重力仪.海洋重力仪属于动态相对重力仪,可在动基座上对重力加速度变化量进行连续测量,为重力辅助惯性导航和资源勘探等提供高精度的重力数据[1 ,2 ] .海洋重力仪根据重力敏感组件结构形式的不同分为摆杆型和轴对称型;根据核心测量元件的不同,又分为金属弹簧式、石英弹簧式、振弦式及磁浮式等多种类型.美国Micro-g LaCoste公司生产的Air-Sea Gravity System Ⅱ型海空重力仪是摆杆型金属弹簧重力仪的典型代表,这类海洋重力仪的优点是摆杆的机械放大作用使仪器能获得较高的灵敏度,缺点是易受水平向加速度的影响,动态测量时会产生交叉耦合效应,海况较差时测量精度难以保证;轴对称型海洋重力仪由于对称结构的优势,对水平向加速度不敏感,能适应各种海况的动态重力测量.该类仪器的典型代表有俄罗斯的GT系列海空重力仪、德国的KSS系列海洋重力仪以及中国科学院精密测量科学与技术创新研究院(原中国科学院测量与地球物理研究所)研制的CHZ-Ⅱ型海洋重力仪[3 ,4 ] . ...
Measurement principle and developmentstatus of high precision gravimeters
1
2017
... 重力仪是测量重力加速度的仪器.根据所测物理量的不同分为绝对重力仪和相对重力仪,根据测量方法的不同又分为静态重力仪和动态重力仪.海洋重力仪属于动态相对重力仪,可在动基座上对重力加速度变化量进行连续测量,为重力辅助惯性导航和资源勘探等提供高精度的重力数据[1 ,2 ] .海洋重力仪根据重力敏感组件结构形式的不同分为摆杆型和轴对称型;根据核心测量元件的不同,又分为金属弹簧式、石英弹簧式、振弦式及磁浮式等多种类型.美国Micro-g LaCoste公司生产的Air-Sea Gravity System Ⅱ型海空重力仪是摆杆型金属弹簧重力仪的典型代表,这类海洋重力仪的优点是摆杆的机械放大作用使仪器能获得较高的灵敏度,缺点是易受水平向加速度的影响,动态测量时会产生交叉耦合效应,海况较差时测量精度难以保证;轴对称型海洋重力仪由于对称结构的优势,对水平向加速度不敏感,能适应各种海况的动态重力测量.该类仪器的典型代表有俄罗斯的GT系列海空重力仪、德国的KSS系列海洋重力仪以及中国科学院精密测量科学与技术创新研究院(原中国科学院测量与地球物理研究所)研制的CHZ-Ⅱ型海洋重力仪[3 ,4 ] . ...
高精度重力仪的测量原理与发展现状
1
2017
... 重力仪是测量重力加速度的仪器.根据所测物理量的不同分为绝对重力仪和相对重力仪,根据测量方法的不同又分为静态重力仪和动态重力仪.海洋重力仪属于动态相对重力仪,可在动基座上对重力加速度变化量进行连续测量,为重力辅助惯性导航和资源勘探等提供高精度的重力数据[1 ,2 ] .海洋重力仪根据重力敏感组件结构形式的不同分为摆杆型和轴对称型;根据核心测量元件的不同,又分为金属弹簧式、石英弹簧式、振弦式及磁浮式等多种类型.美国Micro-g LaCoste公司生产的Air-Sea Gravity System Ⅱ型海空重力仪是摆杆型金属弹簧重力仪的典型代表,这类海洋重力仪的优点是摆杆的机械放大作用使仪器能获得较高的灵敏度,缺点是易受水平向加速度的影响,动态测量时会产生交叉耦合效应,海况较差时测量精度难以保证;轴对称型海洋重力仪由于对称结构的优势,对水平向加速度不敏感,能适应各种海况的动态重力测量.该类仪器的典型代表有俄罗斯的GT系列海空重力仪、德国的KSS系列海洋重力仪以及中国科学院精密测量科学与技术创新研究院(原中国科学院测量与地球物理研究所)研制的CHZ-Ⅱ型海洋重力仪[3 ,4 ] . ...
Some question about data processing of GT-2M marine gravimeter
1
2017
... 重力仪是测量重力加速度的仪器.根据所测物理量的不同分为绝对重力仪和相对重力仪,根据测量方法的不同又分为静态重力仪和动态重力仪.海洋重力仪属于动态相对重力仪,可在动基座上对重力加速度变化量进行连续测量,为重力辅助惯性导航和资源勘探等提供高精度的重力数据[1 ,2 ] .海洋重力仪根据重力敏感组件结构形式的不同分为摆杆型和轴对称型;根据核心测量元件的不同,又分为金属弹簧式、石英弹簧式、振弦式及磁浮式等多种类型.美国Micro-g LaCoste公司生产的Air-Sea Gravity System Ⅱ型海空重力仪是摆杆型金属弹簧重力仪的典型代表,这类海洋重力仪的优点是摆杆的机械放大作用使仪器能获得较高的灵敏度,缺点是易受水平向加速度的影响,动态测量时会产生交叉耦合效应,海况较差时测量精度难以保证;轴对称型海洋重力仪由于对称结构的优势,对水平向加速度不敏感,能适应各种海况的动态重力测量.该类仪器的典型代表有俄罗斯的GT系列海空重力仪、德国的KSS系列海洋重力仪以及中国科学院精密测量科学与技术创新研究院(原中国科学院测量与地球物理研究所)研制的CHZ-Ⅱ型海洋重力仪[3 ,4 ] . ...
GT-2M型海洋重力仪数据处理若干问题的讨论
1
2017
... 重力仪是测量重力加速度的仪器.根据所测物理量的不同分为绝对重力仪和相对重力仪,根据测量方法的不同又分为静态重力仪和动态重力仪.海洋重力仪属于动态相对重力仪,可在动基座上对重力加速度变化量进行连续测量,为重力辅助惯性导航和资源勘探等提供高精度的重力数据[1 ,2 ] .海洋重力仪根据重力敏感组件结构形式的不同分为摆杆型和轴对称型;根据核心测量元件的不同,又分为金属弹簧式、石英弹簧式、振弦式及磁浮式等多种类型.美国Micro-g LaCoste公司生产的Air-Sea Gravity System Ⅱ型海空重力仪是摆杆型金属弹簧重力仪的典型代表,这类海洋重力仪的优点是摆杆的机械放大作用使仪器能获得较高的灵敏度,缺点是易受水平向加速度的影响,动态测量时会产生交叉耦合效应,海况较差时测量精度难以保证;轴对称型海洋重力仪由于对称结构的优势,对水平向加速度不敏感,能适应各种海况的动态重力测量.该类仪器的典型代表有俄罗斯的GT系列海空重力仪、德国的KSS系列海洋重力仪以及中国科学院精密测量科学与技术创新研究院(原中国科学院测量与地球物理研究所)研制的CHZ-Ⅱ型海洋重力仪[3 ,4 ] . ...
3
2005
... 重力仪是测量重力加速度的仪器.根据所测物理量的不同分为绝对重力仪和相对重力仪,根据测量方法的不同又分为静态重力仪和动态重力仪.海洋重力仪属于动态相对重力仪,可在动基座上对重力加速度变化量进行连续测量,为重力辅助惯性导航和资源勘探等提供高精度的重力数据[1 ,2 ] .海洋重力仪根据重力敏感组件结构形式的不同分为摆杆型和轴对称型;根据核心测量元件的不同,又分为金属弹簧式、石英弹簧式、振弦式及磁浮式等多种类型.美国Micro-g LaCoste公司生产的Air-Sea Gravity System Ⅱ型海空重力仪是摆杆型金属弹簧重力仪的典型代表,这类海洋重力仪的优点是摆杆的机械放大作用使仪器能获得较高的灵敏度,缺点是易受水平向加速度的影响,动态测量时会产生交叉耦合效应,海况较差时测量精度难以保证;轴对称型海洋重力仪由于对称结构的优势,对水平向加速度不敏感,能适应各种海况的动态重力测量.该类仪器的典型代表有俄罗斯的GT系列海空重力仪、德国的KSS系列海洋重力仪以及中国科学院精密测量科学与技术创新研究院(原中国科学院测量与地球物理研究所)研制的CHZ-Ⅱ型海洋重力仪[3 ,4 ] . ...
... 从公式(8) 可看出,金属弹簧海洋重力仪敏感质量的位移量x 不仅是重力加速度变化量Δ g z ¨ 0 s i n ( ω z t + δ ) [4 ] . ...
... 来自载体的垂向扰动主要分为两大类:一是海浪引起的超低频大幅扰动,另一类则是载体动力装置引起的高频振动.海浪引起的垂直扰动加速度周期通常为6~10 s,在平静海况下的幅值大约为15 Gal(1 Gal=1×10-2 m/s2 );在风力2~3级,浪高小于1 m的一般海况下,幅值为80~100 Gal;而在风力4~7级、浪高数米的恶劣海况下幅值能达到200 Gal[4 ] . ...
3
2005
... 重力仪是测量重力加速度的仪器.根据所测物理量的不同分为绝对重力仪和相对重力仪,根据测量方法的不同又分为静态重力仪和动态重力仪.海洋重力仪属于动态相对重力仪,可在动基座上对重力加速度变化量进行连续测量,为重力辅助惯性导航和资源勘探等提供高精度的重力数据[1 ,2 ] .海洋重力仪根据重力敏感组件结构形式的不同分为摆杆型和轴对称型;根据核心测量元件的不同,又分为金属弹簧式、石英弹簧式、振弦式及磁浮式等多种类型.美国Micro-g LaCoste公司生产的Air-Sea Gravity System Ⅱ型海空重力仪是摆杆型金属弹簧重力仪的典型代表,这类海洋重力仪的优点是摆杆的机械放大作用使仪器能获得较高的灵敏度,缺点是易受水平向加速度的影响,动态测量时会产生交叉耦合效应,海况较差时测量精度难以保证;轴对称型海洋重力仪由于对称结构的优势,对水平向加速度不敏感,能适应各种海况的动态重力测量.该类仪器的典型代表有俄罗斯的GT系列海空重力仪、德国的KSS系列海洋重力仪以及中国科学院精密测量科学与技术创新研究院(原中国科学院测量与地球物理研究所)研制的CHZ-Ⅱ型海洋重力仪[3 ,4 ] . ...
... 从公式(8) 可看出,金属弹簧海洋重力仪敏感质量的位移量x 不仅是重力加速度变化量Δ g z ¨ 0 s i n ( ω z t + δ ) [4 ] . ...
... 来自载体的垂向扰动主要分为两大类:一是海浪引起的超低频大幅扰动,另一类则是载体动力装置引起的高频振动.海浪引起的垂直扰动加速度周期通常为6~10 s,在平静海况下的幅值大约为15 Gal(1 Gal=1×10-2 m/s2 );在风力2~3级,浪高小于1 m的一般海况下,幅值为80~100 Gal;而在风力4~7级、浪高数米的恶劣海况下幅值能达到200 Gal[4 ] . ...
On the liquid damping of CHZ sea gravimeter
1
... 海洋重力仪工作时,除受到重力加速度的作用之外,还受到海浪引起的垂直扰动加速度、水平扰动加速度以及运动载体动力装置引起的结构振动作用[5 ] .前者属于长周期大幅扰动,后者为高频振动,其幅值往往能达到数百伽,是海洋重力仪动态测量时的主要干扰来源[6 ,7 ] .本文以中国科学院精密测量科学与技术创新研究院自主研制的CHZ-Ⅱ型海洋重力仪为研究对象,将测量原理及重力敏感结构特点相结合,建立海洋重力仪动态测量模型,分析载体垂向扰动对轴对称型金属弹簧海洋重力仪的影响机理. ...
CHZ海洋重力仪的液体阻尼
1
1986
... 海洋重力仪工作时,除受到重力加速度的作用之外,还受到海浪引起的垂直扰动加速度、水平扰动加速度以及运动载体动力装置引起的结构振动作用[5 ] .前者属于长周期大幅扰动,后者为高频振动,其幅值往往能达到数百伽,是海洋重力仪动态测量时的主要干扰来源[6 ,7 ] .本文以中国科学院精密测量科学与技术创新研究院自主研制的CHZ-Ⅱ型海洋重力仪为研究对象,将测量原理及重力敏感结构特点相结合,建立海洋重力仪动态测量模型,分析载体垂向扰动对轴对称型金属弹簧海洋重力仪的影响机理. ...
Newly developed CHZ sea gravimeter
1
1987
... 海洋重力仪工作时,除受到重力加速度的作用之外,还受到海浪引起的垂直扰动加速度、水平扰动加速度以及运动载体动力装置引起的结构振动作用[5 ] .前者属于长周期大幅扰动,后者为高频振动,其幅值往往能达到数百伽,是海洋重力仪动态测量时的主要干扰来源[6 ,7 ] .本文以中国科学院精密测量科学与技术创新研究院自主研制的CHZ-Ⅱ型海洋重力仪为研究对象,将测量原理及重力敏感结构特点相结合,建立海洋重力仪动态测量模型,分析载体垂向扰动对轴对称型金属弹簧海洋重力仪的影响机理. ...
新研制的CHZ海洋重力仪
1
1987
... 海洋重力仪工作时,除受到重力加速度的作用之外,还受到海浪引起的垂直扰动加速度、水平扰动加速度以及运动载体动力装置引起的结构振动作用[5 ] .前者属于长周期大幅扰动,后者为高频振动,其幅值往往能达到数百伽,是海洋重力仪动态测量时的主要干扰来源[6 ,7 ] .本文以中国科学院精密测量科学与技术创新研究院自主研制的CHZ-Ⅱ型海洋重力仪为研究对象,将测量原理及重力敏感结构特点相结合,建立海洋重力仪动态测量模型,分析载体垂向扰动对轴对称型金属弹簧海洋重力仪的影响机理. ...
Research of the detecting and controlling scheme for the zero length spring-based sea-gravimeter
1
2003
... 海洋重力仪工作时,除受到重力加速度的作用之外,还受到海浪引起的垂直扰动加速度、水平扰动加速度以及运动载体动力装置引起的结构振动作用[5 ] .前者属于长周期大幅扰动,后者为高频振动,其幅值往往能达到数百伽,是海洋重力仪动态测量时的主要干扰来源[6 ,7 ] .本文以中国科学院精密测量科学与技术创新研究院自主研制的CHZ-Ⅱ型海洋重力仪为研究对象,将测量原理及重力敏感结构特点相结合,建立海洋重力仪动态测量模型,分析载体垂向扰动对轴对称型金属弹簧海洋重力仪的影响机理. ...
零长弹簧海洋重力仪测控技术研究
1
2003
... 海洋重力仪工作时,除受到重力加速度的作用之外,还受到海浪引起的垂直扰动加速度、水平扰动加速度以及运动载体动力装置引起的结构振动作用[5 ] .前者属于长周期大幅扰动,后者为高频振动,其幅值往往能达到数百伽,是海洋重力仪动态测量时的主要干扰来源[6 ,7 ] .本文以中国科学院精密测量科学与技术创新研究院自主研制的CHZ-Ⅱ型海洋重力仪为研究对象,将测量原理及重力敏感结构特点相结合,建立海洋重力仪动态测量模型,分析载体垂向扰动对轴对称型金属弹簧海洋重力仪的影响机理. ...
Several distinguishing features of the CHZ sea gravimeter
1
... CHZ-Ⅱ型海洋重力仪采用的是一根垂直悬挂的金属弹簧下端连接一敏感质量,实质是一根弹簧秤(图1 ).其测量原理是基于牛顿第二定律,即力等于质量乘以加速度.如质量不变,则可以通过测量力代替加速度[8 ] .其平衡方程为: ...
CHZ海洋重力仪的若干特点
1
1991
... CHZ-Ⅱ型海洋重力仪采用的是一根垂直悬挂的金属弹簧下端连接一敏感质量,实质是一根弹簧秤(图1 ).其测量原理是基于牛顿第二定律,即力等于质量乘以加速度.如质量不变,则可以通过测量力代替加速度[8 ] .其平衡方程为: ...
Design and realization of the control system digitalization for the CHZ sea gravimeter
1
2016
... 式中:k 为弹簧刚度,∆ g m 为质量.通过检测弹簧的微小位移x ,就可以测出重力的相对变化,弹簧因重力变化而引起的微小位移通过电容动极板与定极板组成的高精度电容位移传感器获得[9 ] . ...
CHZ型重力仪控制系统的数字化设计与实现
1
2016
... 式中:k 为弹簧刚度,∆ g m 为质量.通过检测弹簧的微小位移x ,就可以测出重力的相对变化,弹簧因重力变化而引起的微小位移通过电容动极板与定极板组成的高精度电容位移传感器获得[9 ] . ...
Performance characteristics for the g-sensitive elastic structure of CHZ-Ⅱ sea gravimeter
1
2015
... 在动态重力测量过程中,仪器不可避免地受到来自载体的扰动加速度的作用,为消除水平扰动加速度的影响,CHZ-Ⅱ型海洋重力仪的敏感质量在水平方向被拉丝和绷簧所约束,使之只有一个沿其自身轴线平移的自由度(图2 )[10 ] .由于这种结构与仪器的敏感轴对称,故称为轴对称型重力仪.设在平衡位置时每根拉丝的拉力均为T 0 3 T 0 . 当重力加速度发生变化时,测量弹簧和绷簧均产生形变,使得敏感质量沿其轴线方向移动位移x 的同时绕其轴线产生小角度转动.此时,拉丝及绷簧上的拉力均发生变化,设拉丝拉力为T ,则绷簧张力为3T ,设拉丝长度为L ,公式(2) 应修正为: ...
CHZ-Ⅱ海洋重力仪重力敏感结构的性能测试与分析
1
2015
... 在动态重力测量过程中,仪器不可避免地受到来自载体的扰动加速度的作用,为消除水平扰动加速度的影响,CHZ-Ⅱ型海洋重力仪的敏感质量在水平方向被拉丝和绷簧所约束,使之只有一个沿其自身轴线平移的自由度(图2 )[10 ] .由于这种结构与仪器的敏感轴对称,故称为轴对称型重力仪.设在平衡位置时每根拉丝的拉力均为T 0 3 T 0 . 当重力加速度发生变化时,测量弹簧和绷簧均产生形变,使得敏感质量沿其轴线方向移动位移x 的同时绕其轴线产生小角度转动.此时,拉丝及绷簧上的拉力均发生变化,设拉丝拉力为T ,则绷簧张力为3T ,设拉丝长度为L ,公式(2) 应修正为: ...
Study on the vibrant characteristic of base system of marine main engine
1
... 海洋重力仪的载体——测量船的动力装置自身质量较大,内部存在偏心质量,运转时会产生不平衡力,是海洋重力仪动态测量环境高频扰动的主要来源.测量船通常采用中速柴油发动机,以6L23/30型6缸中速柴油发动机为例,其额定功率为810 kW,额定转速为825 r/min(此时主机激振力频率为41.25 Hz).对安装该型发动机的船体基座进行模态分析和实况测试,结果表明其各阶模态频率范围为13.5~100 Hz,最大加速度幅值为数百伽(Gal)[11 ] . ...
船用主机基座系统的振动特性研究
1
2009
... 海洋重力仪的载体——测量船的动力装置自身质量较大,内部存在偏心质量,运转时会产生不平衡力,是海洋重力仪动态测量环境高频扰动的主要来源.测量船通常采用中速柴油发动机,以6L23/30型6缸中速柴油发动机为例,其额定功率为810 kW,额定转速为825 r/min(此时主机激振力频率为41.25 Hz).对安装该型发动机的船体基座进行模态分析和实况测试,结果表明其各阶模态频率范围为13.5~100 Hz,最大加速度幅值为数百伽(Gal)[11 ] . ...
Signal concersionand non-lnear correction of capacitive displacement sensor
1
2007
... CHZ-Ⅱ型海洋重力仪敏感质量的位移是由差动电容来检测的.在电容位移传感器中,传感器对微位移的测量是衡量电容位移传感器最重要的指标之一,直接关系到电容位移传感器的整体性能.电容位移传感器对微位移的测量越精确、响应速度越快、非线性越小,整体性能就越好[12 ] . ...
电容位移传感器信号转换及非线性校正技术研究
1
2007
... CHZ-Ⅱ型海洋重力仪敏感质量的位移是由差动电容来检测的.在电容位移传感器中,传感器对微位移的测量是衡量电容位移传感器最重要的指标之一,直接关系到电容位移传感器的整体性能.电容位移传感器对微位移的测量越精确、响应速度越快、非线性越小,整体性能就越好[12 ] . ...
On the effect of dynamic non-linearity of CHZ sea gravimeter in dynamic gravity measurement
1
... 非线性误差定义为海洋重力仪在静态所测得的重力值与动态所测得的重力值的差值.从测量原理上来说,轴对称型海洋重力仪的敏感轴是与重力及垂直扰动加速度的轴线相重合的,理论上不存在非线性误差,但实际上,非线性误差不可避免地存在.原因主要包括以下几个方面:一是测量弹簧本身的非线性,即弹簧的刚度并不是一个常数,导致弹簧的伸长率与所受力之间并不严格成比例关系;二是用于限制敏感质量水平向运动的拉丝和绷簧(图6 )并不是严格水平的,敏感质量发生垂向位移时,拉丝及绷簧上的拉力在垂直方向的分量呈非线性变化;三是用于检测敏感质量位移的差动电容极板不平行引起的非线性.其中,测量弹簧本身非线性及电容极板不平行引起的非线性误差通常在10-8 ~10-6 mGal量级,对于动态精度1 mGal的重力仪而言可忽略不计,而拉丝和绷簧的不水平是仪器产生非线性误差的主要原因[13 ] .拉丝和绷簧的不水平通常表现为安装时机械零位与电零位不重合引起的拉丝和绷簧整体向某一方向偏移. ...
CHZ重力仪在动态重力测量中的非线性问题
1
1987
... 非线性误差定义为海洋重力仪在静态所测得的重力值与动态所测得的重力值的差值.从测量原理上来说,轴对称型海洋重力仪的敏感轴是与重力及垂直扰动加速度的轴线相重合的,理论上不存在非线性误差,但实际上,非线性误差不可避免地存在.原因主要包括以下几个方面:一是测量弹簧本身的非线性,即弹簧的刚度并不是一个常数,导致弹簧的伸长率与所受力之间并不严格成比例关系;二是用于限制敏感质量水平向运动的拉丝和绷簧(图6 )并不是严格水平的,敏感质量发生垂向位移时,拉丝及绷簧上的拉力在垂直方向的分量呈非线性变化;三是用于检测敏感质量位移的差动电容极板不平行引起的非线性.其中,测量弹簧本身非线性及电容极板不平行引起的非线性误差通常在10-8 ~10-6 mGal量级,对于动态精度1 mGal的重力仪而言可忽略不计,而拉丝和绷簧的不水平是仪器产生非线性误差的主要原因[13 ] .拉丝和绷簧的不水平通常表现为安装时机械零位与电零位不重合引起的拉丝和绷簧整体向某一方向偏移. ...
Frequency-piecewise control scheme for the gravity measurement servo loop of the CHZ gravimeter
1
2015
... 根据轴对称型金属弹簧海洋重力仪的测量原理[14 ] ,△a 表达式中的一次项和三次项在正弦扰动的一个周期内积分为零,通过低通滤波后并不贡献测量误差,只有二次项贡献测量误差,因此: ...
CHZ型重力仪重力测量伺服回路的分频段控制方案
1
2015
... 根据轴对称型金属弹簧海洋重力仪的测量原理[14 ] ,△a 表达式中的一次项和三次项在正弦扰动的一个周期内积分为零,通过低通滤波后并不贡献测量误差,只有二次项贡献测量误差,因此: ...





 甘公网安备62010202000687
甘公网安备62010202000687{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}