

1 引 言
由于滑坡灾害频繁发生,对人类社会造成了重大人员伤亡和财产损失,滑坡的预防与边坡治理一直受到人们的广泛关注[1,2,3,4]。早在1890年锚杆锚固技术就出现在北威尔士的矿山巷道加固工程中[5]。从20世纪50年代后期至今,我国锚杆工程也不断发展,从最初的煤矿工程[6,7]领域逐步扩展到边坡治理、铁路隧道以及深基坑支护等工程中。随着锚杆工程的广泛应用,其锚固机理的研究与支护效果提升也得到了加强。例如,贺若兰等[8]建立了能够模拟岩土与锚杆界面处力学特性的摩擦—接触型界面单元并进行仿真分析,可以反映现场试验中锚杆的力学特征。韦立德等[9,10]考虑了锚杆摩阻力的作用,建立了基于强度折减理论、有限元理论的锚杆计算模型。何思明等[11,12]基于锚杆锚固机理建立了岩土体弹塑性模型。虽然锚杆具有支护效果好、有利于机械化操作、用料省、施工简单、速度快等优点,但锚杆锚固属于隐蔽工程,当施工质量或者锚固效果不能达到设计要求时,可能会产生严重的后果,不仅不能起到锚固作用,还增加了边坡等工程的裂隙,破坏了其完整性。因此,对于加固后边坡稳定性的监测显得尤为重要。
目前对于智能监测主要手段有激光、宏观监测[13]、摄影[14]、无人机[15]、基于材料自身特性的传感器[16,17,18,19]以及目前新兴的光纤光栅技术等。激光、宏观监测、GPS和RS[20]等常规监测手段通过与其他技术手段结合的方式来寻求进一步的发展,但仍不能改善其劣势。光纤光栅[21,22,23]的应用目前正处于发展时期,已经得到广泛认可与应用。但由于解调仪价格昂贵,铺设线路费用等问题限制,对低成本且适合长期监测的仪器手段的需求也越来越迫切。随着微机电系统(Micro-Electro Mechanical System,MEMS)的发展,MEMS传感器在土木工程领域展示了其广阔的应用前景。MEMS技术产生于20世纪50年代。1962年,第一个硅微型压力传感器的问世为人类带来了MEMS技术[24]。近年来MEMS传感器在边坡工程监测领域的应用得到了较广泛的关注[25],Abdoun等[26]和Bennett等[27]最初提出将加速度传感器阵列(Shape Accelerate Array,SAA)应用于监测滑坡等自然灾害,每个传感器都连接到无线地面站,从而实现实时监控和远程传感器配置。并在加利福尼亚州某边坡进行现场监测土体的加速度和位移,获得了较好的实验结果。Ooi等[28]将微型2轴和3轴加速度计布设于试验水槽的斜坡中,探究了突发性滑坡和渐进性滑坡的滑动特征,证明了低成本监测的可能性。Chang等[29]针对传统监测手段的昂贵和安装不方便等缺点,开发了基于MEMS传感器的无线网络传感系统。Wang等[30,31,32]基于一种倾斜仪提出了一种早期预警系统,并进行降雨触发滑坡的模型试验,预警系统的服务站可根据实时接收的信息反演监测边坡的运动情况。Ikuo等[33]充分考虑当地地质、水文和地形在空间上变化的影响,提出了基于监测边坡位移/变形的预警准则,并以2013年10月日本某地区的暴雨引发边坡破坏的案例论证了预警准则的可行性。Mao等[34]针对大型边坡与大坝设计了一种全新的自动化测量系统,该系统采用阵列结构、长跨度的方式布设传感器,充分发挥了MEMS加速度计的高精度监测优势。Murakami等[35]利用低成本的MEMS传感器电子标签开发了大型监测系统,并用于监测地震和降雨条件下的边坡运动特征。Wang等[36]利用基于MEMS传感器棒和土壤—水特征曲线(Soil-Water Characteristic Curve,SWCC)建立了一体化系统,用以评估降雨引起的浅层边坡破坏的安全系数。Yang等[37]基于MEMS传感器建立了降雨诱发滑坡的监测预警系统,通过监测土壤含水量、基质吸力、降雨、倾角和地面振动等状态变量的变化来达到监测预警的目的,这是针对险峻山区较实用经济的对策之一。目前MEMS传感器对边坡的监测主要向无线实时、长跨度领域拓展。本文旨在利用MEMS传感器探讨锚杆对边坡的锚固作用,充分发挥MEMS技术低成本、小体积、高精度的优点,探索MEMS传感器在地质工程监测领域的应用。
2 模型试验
2.1 试验土样与方法
本次试验采用天然河砂,其含水率为12%,颗粒累积级配曲线斜率较陡、平滑连续且无明显平台,砂土颗粒大小均一,粒径主要集中在0.25~1.00 mm,粒径大于0.5 mm的颗粒占比为64.1%(大于50%),为粗砂。试验中砂土密度为1 650 kg/m3,通过直接剪切试验获得该砂土的黏聚力c为0 kPa,内摩擦角φ为30°。
试验分为A组和B组,具体要求如表1所示。坡角为45°的天然砂土边坡在自然界中虽然较少,但是在挖方和堆方边坡中经常存在,坡角越大,锚杆支护工程和稳定性监测越显得更为重要。


试验过程如下:
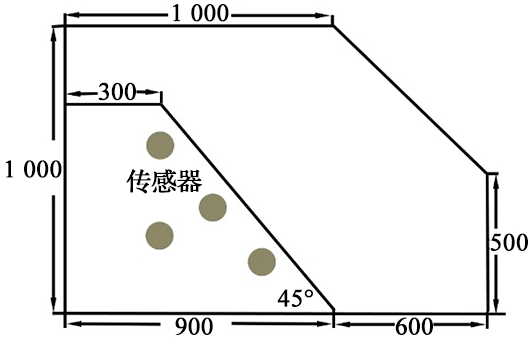
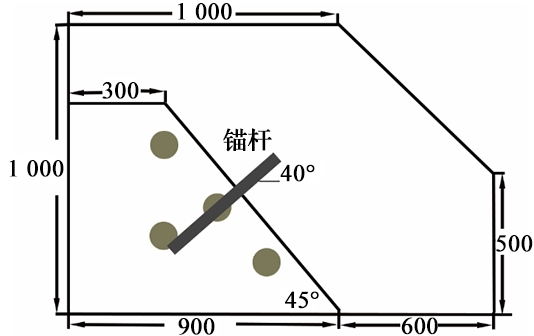
(1)将含水率为12%的砂土采用撒砂法堆于模型箱中,堆积成坡角为45°的边坡,其中试验B边坡布设锚杆,锚杆与水平呈40°夹角。将8个经防水处理的蓝牙式MEMS传感器经标定后按图1所示埋入边坡中(传感器分左右两侧布置)。
图1
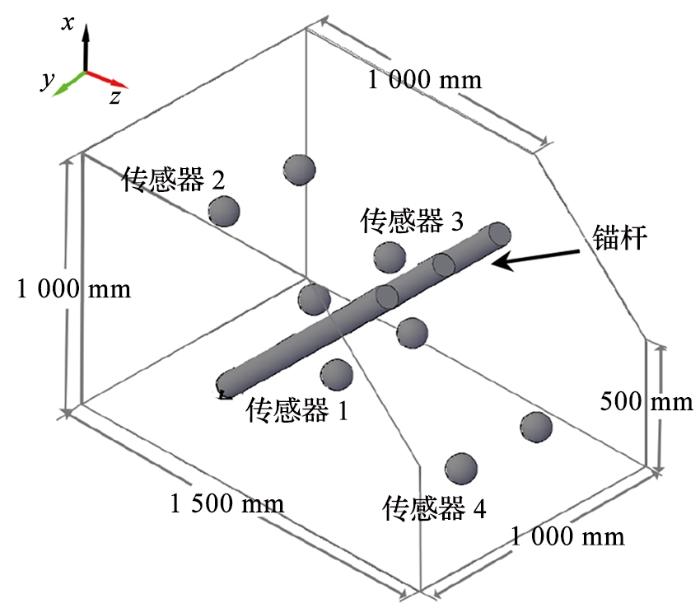
图1
MEMS传感器、锚杆布设位置示意图
Fig.1
Experimental setup of MEMS sensors and bolts
传感器、锚杆大小未按实际比例
The sizes of sensors and bolts are not related to the real scale
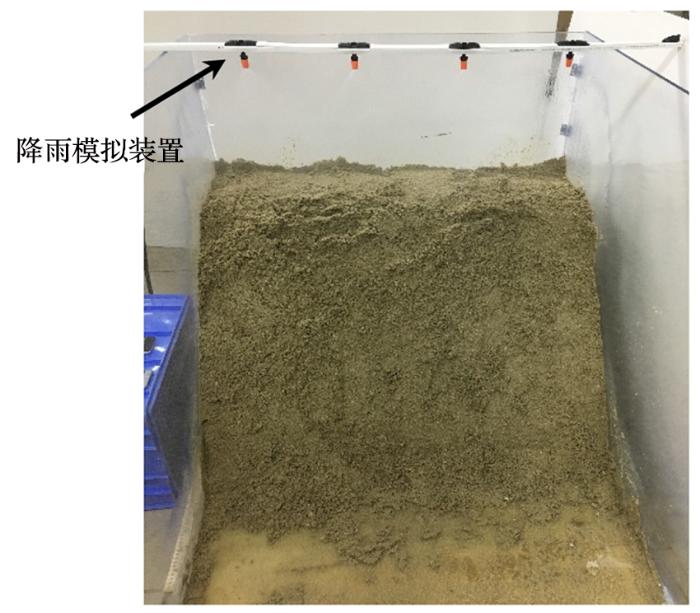
(2)在边坡上方40 cm、距模型箱后壁30 cm处提供花洒装置模拟降雨,降雨波及坡顶与坡面,实验室水管压力为0.1 MPa,降雨强度约为150 mm/h,为特大暴雨。同时记录MEMS传感器的传输数据至边坡破坏,统计边坡滑动时各监测点的加速度、角速度和角度的变化。
2.2 试验设备
图2
2.3 测试元件
本次模型试验采用的测试元件为基于MEMS技术的BWT901,其尺寸为51 mm×36 mm×15 mm,能够同时监测x,y和z的三轴加速度、角速度以及角度9个变量,蓝牙传输数据,最高输出速率可达200 Hz,动态测角精度可达0.05°,每秒传输数据量为10个。模型试验所用锚杆为铝制空心管,长1 000 mm,直径50 mm。锚杆布设与水平呈40°夹角。
3 试验结果及分析
3.1 试验数据采集情况
图3
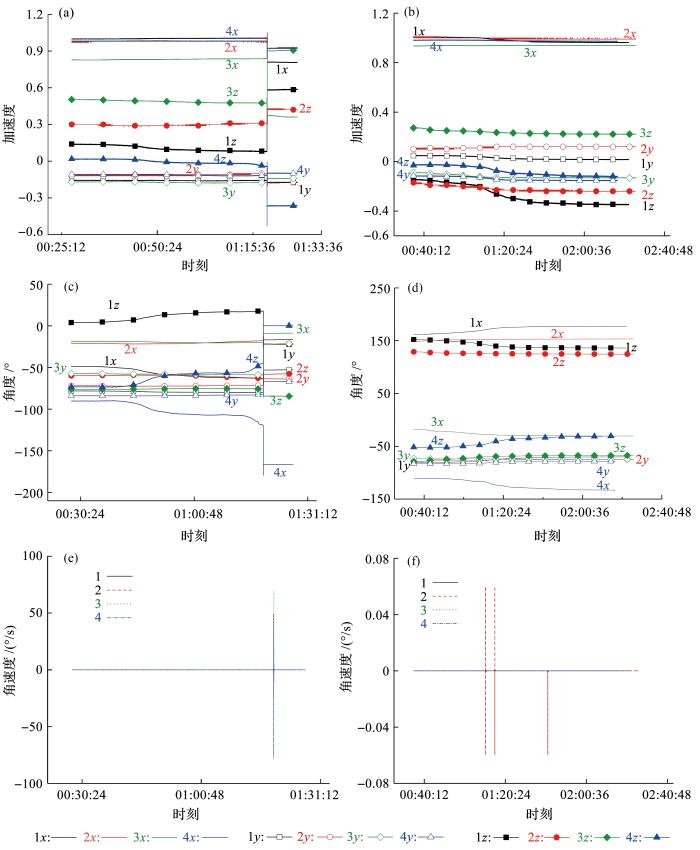
图3
试验A、B左侧布置MEMS传感器数据监测结果
Fig. 3
Experimental data monitoring result of test A and B by MEMS sensors setup in left side
(a)试验A加速度;(b)试验B加速度;(c)试验A角度;(d)试验B角度;(e)试验A角速度;(f)试验B角速度;“x,y,z”表示3个互相垂直的
方向; “1~4”表示MEMS传感器编号(a) The acceleration of test A; (b) The acceleration of test B; (c) The angle of test A; (d) The angle of test B; (e) The angular velocity of test A; (f) The angular velocity of test B; x, y and z represent the three orthogonal directions; 1~4 mean the labeled numbers of MEMS sensors
表2 试验A和B的试验现象
Table 2
| 试验A | 试验B | ||||
|---|---|---|---|---|---|
| 时间 | 试验现象 | 试验观测图 | 时间 | 试验现象 | 试验观测图 |
| 0 min | 施加降雨,开始记录 | 0 min | 施加降雨,开始记录 | ||
| 25~48 min | 边坡后缘产生拉裂缝直至贯通,边坡底、中、顶部均产生裂缝,边坡整体向下蠕滑 | 30~40 min | 边坡后缘产生拉裂缝直至贯通,由于安装锚杆,拉裂缝靠后 | ||
| 52 min | 滑坡发生,最终坡角为15°,后缘拉开至距离模型箱 6 cm,坡体跨度长为1.4 m | 55~60 min | 边坡坡角处产生拉裂缝,边坡最终状态 | ||
| 60 min | 停止记录,时间跨度为60 min | 110 min | 停止记录,时间跨度为110 min | ||
3.2 试验现象与数据分析
对边坡滑动时坡体内部各布控点的x,y和z的3个方向加速度、角度和角速度进行对比分析,并结合宏观试验现象,从而获得有无锚杆加固边坡的运动情况。
MEMS传感器的三轴正方向分别为模型箱上方为x轴正向,左侧为y轴正向,前方为z轴正向(图1)。当传感器埋置稳定后,x轴加速度趋近于1 g(g为重力加速度),y和z轴加速度趋近于0。滑坡发生时,滑体向前、向下运动,x轴加速度将降低,z轴加速度将会升高;滑坡向前、向下滑动的同时会伴随着滑体的左右移动,则y值将会有轻微波动。本次试验获得的参数的变化情况也均满足上述分析。
试验中左侧传感器与右侧传感器平行布置,试验结果显示左、右传感器变化情况基本一致,本文以左侧传感器数据为例进行讨论。
试验A为坡角为45°、无锚杆的情况。根据表2中试验A观测的宏观现象可知,开始试验25 min后,边坡后缘产生拉裂缝,最宽可达3 cm,斜坡面底、中、顶部均产生裂缝,边坡整体向下蠕滑;在开始试验52 min后,滑坡发生,最终坡角为15°,高度为53 cm,降低7 cm,后缘拉开至距离模型箱6 cm,坡度差为16 cm,坡体跨度长为1.4 m。MEMS传感器监测结果与宏观试验现象一致。图3为试验A和B左侧布置MEMS监测结果,图例中数字即为传感器编号(图1)。由图3a和3c可知,在试验开始25 min后,即00:48传感器1和传感器4的z轴加速度和角速度产生明显变化,角度变化尤其明显,表明在滑坡发生前边坡的内部和坡脚处发生了明显的蠕滑, MEMS传感器能够捕捉到边坡的蠕滑,对预报滑坡具有较好的效果。由图3a,3c和3e可知,在开始试验52 min后,即01:19各传感器的各个参数均发生明显突变,表明边坡整体发生破坏,与宏观试验现象吻合。其中加速度的突变情况为:x轴加速度突然降低,z轴加速度突然增加,表示滑体于01:19向前、向下运动。图4为传感器监测数据局部放大图,据图4可知,传感器变化顺序为1,4,3,2,表明边坡内部和坡脚先破坏,边坡顶部和后缘跟随破坏。
图4
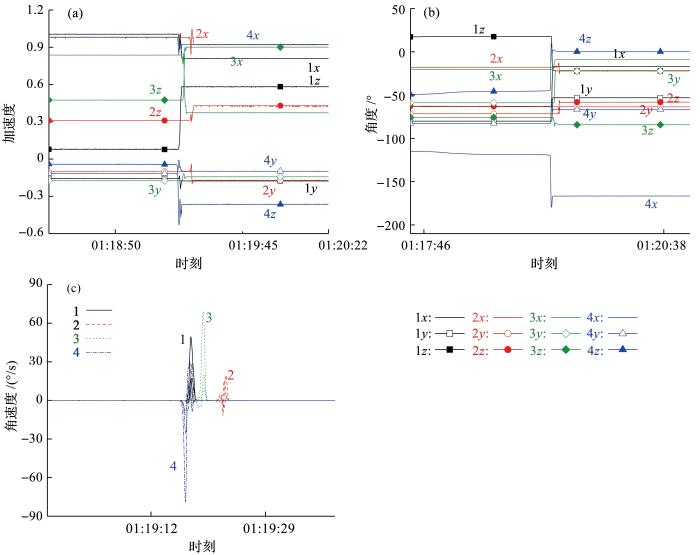
图4
试验A左侧传感器数据放大图
Fig. 4
Data enlargement diagram of sensors on the left side of test A
(a)加速度局部放大图;(b)角度局部放大图;(c)角速度局部放大图; “x,y和z”表示3个互相垂直的方向;“1~4”表示MEMS传感器编号
(a) Partial magnification of acceleration; (b) Partial magnification of angle; (c) Partial magnification of angular velocity; x, y and z represent the three orthogonal directions; and 1~4 mean the labeled numbers of MEMS sensors
在实验过程中也可以明显观察到边坡滑动时坡体内部和坡脚处先破坏,随后发生整体滑动。水入渗使边坡内应力重新分布,坡脚处剪应力集中,坡顶处拉应力集中。随着水的不断渗入,边坡后缘土与边坡整体脱离产生拉裂缝。另一方面,水的入渗降低了土的抗剪强度,同时,水压力也使得边坡的抗滑力减小,下滑力增加,边坡的稳定性降低,当抗滑力不断减小至小于下滑力,导致滑坡发生。具体表现为边坡后缘产生拉裂缝,使边坡土体大部分与边坡基部分离,坡脚处出现应力集中,发生剪切破坏。本次试验中MEMS传感器能够成功捕捉到边坡滑动特征。通过传感器的数据情况分析可认为此次滑坡为牵引式滑动,即边坡坡脚处先产生拉裂缝,带动边坡顶部及后缘随之滑动,与卢应发等[39]提出的牵引式破坏模式一致。
试验B为坡角为45°,并布设锚杆的情况。表2中试验B观测的宏观现象表明:在开始试验 30 min后,边坡后缘产生拉裂缝直至贯通,由于锚杆的锚固作用使边坡后缘拉裂缝靠后;在试验开始50~60 min后,边坡坡脚处产生拉裂缝,随后60 min内边坡未再出现破坏,认为此时的边坡即为最终状态,坡角为40°。图3b,3d和3e的MEMS监测数据反映的信息与宏观试验现象一致。由图3b和3d可知,在试验开始30 min后,可明显观察到各传感器监测的运动参数只存在渐变,未发生突变,即该边坡只产生蠕滑,没有发生整体破坏,表明锚杆对边坡加固从而达到增加其稳定性的作用。传感器1,3和4的加速度和角度随时间的变化较大,传感器2的变化最小,表明坡体内部、坡脚发生较明显的蠕滑,斜坡面蠕滑次之,而边坡后缘则相对较小。最终经过2个小时的监测,各传感器的参数基本稳定,不再有较明显的变化,推测边坡不再发生破坏,与宏观观测现象一致,最终边坡坡角由初始的45°变为40°。
试验A与试验B的边坡蠕滑分别发生在试验开始后的25和30 min,试验B边坡发生蠕滑所需的时间相对于试验A较长,表明锚杆对边坡具有加固作用,这是由于锚杆加固后使边坡内的潜在滑体变大,从而使潜在滑体需要接受更长时间的降雨才能发生蠕滑。据图3f分析,在边坡整体稳定的前提下,边坡的角速度会随着边坡的蠕滑偶尔发生微弱变化,能够部分反映出边坡的变化情况。
对比分析试验A和B,即坡角均为45°,但对有锚杆和无锚杆的边坡进行对比分析后表明:当边坡坡角为45°时,对边坡施加持续降雨条件会使边坡发生破坏,当对坡角为45°的边坡进行锚杆加固后,对边坡施加持续降雨条件,边坡土体可以通过蠕滑降低坡角从而使边坡稳定,而未发生整体滑动破坏。
4 结 语
通过MEMS传感器对边坡各布设点的监测数据的对比分析,结合宏观试验现象,得出以下结论:
(1)将多枚MEMS传感器埋入边坡中,能够成功捕捉到滑坡发生前坡体内部的蠕滑情况,以及滑坡发生时坡体内部的运动情况,有助于研究边坡的滑动机制,同时证明MEMS传感器在智能监测领域应用的可行性。
(2)本试验中,对于无锚杆加固砂土坡,加速度、角度和角速度在边坡内部与坡脚处率先发生突变,在边坡后缘与表面随后发生突变,即边坡内部与坡脚处先破坏,边坡后缘与坡面后破坏,为典型的牵引式滑坡。
(3)砂土坡在采用锚杆加固后能够满足稳定性要求,锚杆可以作为“骨骼”对边坡起到支撑作用。当降雨发生时,边坡发生蠕滑,坡角降低,达到新的稳定状态。根据加固后的坡体内部传感器所反映的运动指标的渐变性蠕滑特征,表明边坡土体运动主要集中在边坡内部与坡脚处,坡面受到降雨的影响发生微弱蠕滑。
参考文献
Behavior of rock in slopes
[J].
Progressive failure in slopes of over consolidated plastic clay and clay shales
[J].
Probabilitic model of progressice failure of slopes
[J].
Reliability model of progressive slope failure
[J].
Experimental Study on Load Transfer Law and Anchorage Characteristics of Rock-soil Anchorage
[D].
岩土锚固荷载传递规律与锚固特性试验研究
[D].
Roadway Surrounding Rock Control
[M].
巷道围岩控制
[M].
Geotechnical engineering and its application
[J].
岩土锚固工程技术及其应用
[J].
Theoretical and numerical analysis of bolt drawing test
[J].27(Suppl
.
锚杆拉拔试验的理论和数值分析
[J].
A calculation model of bolt and its application in rock slope bolt support
[J].
一种锚杆计算模型及其在岩坡锚杆支护中的应用
[J].
Study on numerical simulation method of three-dimensional bolt
[J].
三维锚杆数值模拟方法研究
[J].
Study on the action mechanism of prestressed bolt
[J].
预应力锚杆作用机制研究
[J].
Study on load transfer characteristics of cementing prestressed anchor cable anchorage section
[J].
胶结式预应力锚索锚固段荷载传递特性研究
[J].
Intelligent safety monitoring and on-site disaster warning technology of highway slope safety
[J].
公路边坡危岩智能安全监测及现场灾害报警技术
[J].
Study on the Monitoring and Prediction of the Slope of Jian-shan Phosphate Rock
[D].
尖山磷矿边坡监测及预测预报研究
[D].
Application of UAV low-altitude photogrammetry in loess landslide investigation and evaluation
[J].
无人机低空摄影测量在黄土滑坡调查评估中的应用
[J].
Conventional instrument combined with GPS automatic remote control of the slope monitoring system
[J].
常规仪器与全球定位仪相结合的全自动化遥控边坡监测系统
[J].
The coaxial cable of the electromagnetic wave reflection technique monitoring of landslide research
[J].
同轴电缆电磁波反射技术监测滑坡研究
[J].
A new method of landslide monitoring—TDR technology analysis
[J].
滑坡监测的一种新方法——TDR技术探析
[J].
Monitoring and warning system of high and steep slope of DMCC based on GPS and GIS
[J].
基于GPS和GIS的大冶铁矿高陡边坡监测预警系统
[J].
Research and Application of a New Type of Measurement Method
[D].
一种新型的索力测量方法研究及应用
[D].
Application of fiber Bragg grating displacement sensor in slope monitoring
[J].
光纤光栅位移传感器在边坡监测中的应用研究
[J].
Feasibility study on application of BOTDR strain monitoring technology in health diagnosis of large-scale foundation works
[J].
BOTDR应变监测技术应用在大型基础工程健康诊断中的可行性研究
[J].
Urban sustainability evaluation based on remote sensing and network data support: Progress and prospect
[J].
遥感与网络数据支撑的城市可持续性评价:进展与前瞻
[J].
Current status and application of MEMS sensors
[J].
MEMS传感器现状及应用
[J].
What's the slope? Use an accelerometer to measure slope
[J].
Wireless MEMS-based system for real-time geotechnical instrumentation of active slopes
[J].
Design and characterization of a compact array of MEMS accelerometers for geotechnical instrumentation
[J].
An exploratory study on using miniature sensors to monitor landslide motion
[C]
Study of Wireless Sensor Network (WSN) using for slope stability monitoring
[C]
An early warning system of unstable slopes by multi-point MEMS tilting sensors and water contents
[C]
Case histories of slope failure and landslide disaster prevention by using a low cost tilt sensor monitoring system
[M]
Distributed tilt sensors for an early warning monitoring of Earthquake-induced landslides and slope failures
[C]
Monitoring of unstable slopes by MEMS tilting sensors and its application to early warning
[C]
Design and implementation of a certain kind of long-span continuous displacement measurement system based on MEMS acceleration sensors' array shaped as a line
[J].
Monitoring system for slope stability under rainfall by using MEMS acceleration sensor IC tags
[C]
Simplified monitoring and warning system against rainfall-induced shallow slope failures
[J].
A multi-source early warning system of MEMS based wireless monitoring for rainfall-induced landslides
[J].
Experimental Study on Large-scale Physical Model of Landslide and Bolt Anti-slide Pile Interaction
[D].
滑坡与锚杆抗滑桩相互作用的大型物理模型试验研究
[D].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}