李涌涛 , 李建文, 潘林
, 李建文, 潘林
Li Yongtao, Li Jianwen, Pan Lin
中图分类号: P228
通讯作者:
*通信作者:李建文(1971-),男,浙江省富阳人,教授,主要从事卫星导航系统工程相关技术研究.E-mail:
收稿日期: 2018-07-9
修回日期: 2018-10-13
网络出版日期: 2018-11-20
版权声明: 2018 地球科学进展 编辑部
作者简介:
First author:Li Yongtao(1990-), male,Yuxi County,Yunnan Province,Master student. Research areas include ionospheric TEC modeling and data analysis. E-mail:641594920@qq.com
作者简介:李涌涛(1990-),男,云南省玉溪人,硕士研究生,主要从事电离层TEC建模与数据分析研究.E-mail:641594920@qq.com
展开
摘要
随着北斗三号全球卫星导航系统16颗组网中圆地球轨道(MEO)卫星的发射成功与新信号的播发,北斗正式进入全球系统的建设阶段,同时国际全球导航卫星系统(GNSS)监测评估系统(iGMAS)也从卫星端到地面接收端等各方面对北斗三号系统的运行性能进行系统测试和评估。从数据完整率、多路径误差、伪距噪声和载噪比等4个方面,对12颗北斗三号MEO卫星上播发的新信号B1C和B2a的观测数据质量进行分析评估,并与全球定位系统(GPS)和伽利略(GALILEO)系统进行比较分析。结果表明,北斗三号系统内B1C的观测数据完整率优于B2a,多路径误差、伪距噪声和载噪比B2a信号优于B1C,北斗三号12颗MEO卫星的工作性能相当,即北斗三号在各卫星建设中的一致性与统一性。伪距噪声方面北斗三号较GPS和GALILEO略大,观测数据完整率、多路径误差和载噪比等方面北斗三号则与GPS和GALILEO相当。
关键词:
Abstract
With the successful launch of the sixteen MEO satellites of the Beidou-3 global satellite navigation system and the broadcast of new signals, Beidou has officially entered the global construction stage while the international GNSS Monitoring and Assessment System (iGMAS) is also performing systematic testing and evaluation on various aspects of operational performance from satellite end to ground receiving end of Beidou-3 system. This paper analyzed and evaluated the observation quality of new signals B1C and B2a broadcasted by the twelve new Beidou-3 MEO satellites on the observation data integrity rate, multipath error, pseudorange noise and Carrier-to-Noise Ratio (CNR) compared with GPS and GALILEO. The results show that the observation data integrity rate of B1C signal is better than that of B2a signal in the Beidou-3 system. In the aspects of multipath error, pseudorange noise and CNR, B2a signal is better than that of B1C. The performances of the twelve MEO satellites of Beidou-3 are equivalent, that is, for Beidou-3, the consistency of satellites can be guaranteed. In terms of pseudo-range noise, Beidou-3 is slightly worse than GPS and GALILEO While the observation data integrity rate, multipath error and CNR of Beidou-3 are equivalent to those of GPS and GALILEO.
Keywords:
按照北斗卫星导航系统的“三步走”发展战略,在2020年前后,将建成北斗全球系统,提供全球服务。2017年11月5日我国北斗三号全球卫星导航系统第一颗和第二颗卫星成功发射,拉开了我国北斗全球系统组网工程建设的序幕[1]。截止2018年10月,我国已成功发射16颗北斗三号中圆地球轨道(Medium Earth Orbit,MEO)卫星,并且已经在之前发射的12颗MEO卫星上播发新体制信号B1C (1 575.420 MHz)和B2a(1 176.450 MHz)[2]。随着全球四大导航卫星系统的建设,各系统之间的兼容与互操作已成为全球导航卫星系统(Global Navigation Satellite System,GNSS)的发展趋势,并且兼容与互操作都与GNSS信号有关,其中B1C信号与全球定位系统(Global Positioning System,GPS) L1信号和伽利略(GALILEO)系统 E1信号形成兼容互操作,B2a信号与GPS L5C信号和GALILEO E5a信号形成兼容互操作[3,4]。在北斗三号系统卫星组网及新信号调制发播的同时,国际GNSS监测评估系统(International GNSS Monitoring and Assessment System,iGMAS)也从卫星端到地面接收端等各方面对北斗三号系统的运行性能进行系统测试和评估;且相应的北斗GNSS接收机的研制及调试也在加紧进行,目前iGMAS全球跟踪站上的GNSS接收机也已具备接收北斗三号卫星B1C和B2a信号的能力。
随着全球卫星导航系统的发展及北斗三号组网的建设,用户对GNSS服务质量的要求也逐渐提高。就观测数据而言,一方面观测数据的质量直接影响GNSS的定位精度和可靠性,良好的观测数据质量是对后续提供高质量及高稳定性服务的保障,并且数据质量还与接收机的生产研发、跟踪站的选址建设以及确定卫星轨道的定轨加权策略等均有着密切关系[5];另一方面,观测数据质量也能反映出相应接收机的工作性能水平,以及信号发播端卫星系统的完好性、可用性和连续性等基本服务性能水平,进而对接收机的研制及卫星系统建设提供及时的参考。因此对北斗三号新发播的B1C和B2a信号数据质量的分析评估显得尤为重要[5,6,7,8]。
由于在GNSS信号的产生、传播、接收过程中,不可避免地会受到多种因素的影响,因此分析评估GNSS数据质量需从多方面考虑。本文选取5个iGMAS全球GNSS跟踪站观测数据,从观测数据完整率、多路径误差、伪距噪声和载噪比等4个方面,对北斗三号系统卫星观测数据质量进行分析评估,并与GPS和GALILEO观测数据质量进行比较分析。以期对北斗测量型GNSS接收机的研制、指标检定,全球跟踪站选址,北斗三号卫星定轨、钟差计算、GNSS数据处理,北斗及iGMAS相关GNSS观测数据质量标准的编写提供一定的参考。
观测数据完整率是接收机观测到卫星的实际历元数据量与理论历元数据量的比值[7,8]。观测数据完整率反映了观测时段内接收机接收到GNSS各系统数据的完整性。完整的观测数据是进行数据处理及其他应用服务的前提;观测数据完整率也受接收机性能、卫星工作性能及观测站周围环境的制约,从而可以反映接收机及卫星工作性能等相关问题[5]。因此数据完整率是一项能直观反映观测数据质量的综合性指标,也是数据质量分析中不可缺少的环节[8]。
计算单频点观测数据完整率如公式(1)所示。
式中:DIf为单频点观测数据完整率(%);n为观测时间段内观测的卫星总数;Aj为观测时间段内第j颗卫星在某频点的实际观测历元总数;Bj为观测时间段内第j颗卫星在某频点的理论历元总数。
多路径误差是由非直达导航信号引入的测距误差。受多路径效应的影响,GNSS伪距及相位观测值的精度受到严重损害,严重时甚至还会引起信号失锁[9,10]。多路径误差作为测距信号中的主要误差,严重影响导航定位精度,且该项误差通过差分或者建模的方法进行消除效果并不理想[11,12,13,14,15],因此在数据质量分析时应着重考虑。
伪距多路径误差的计算,需要依赖双频观测数据。采用伪距观测方程和载波相位观测方程组合,消除对流层和电离层延迟影响,当多频观测数据时,采用频率相差较大的2个导航信号进行双频组合计算[6,7],多路径计算如公式(2)所示。
式中:M
对于同一颗卫星在连续观测且无周跳的情况下组合的模糊度参数不会变化,在无周跳的多个历元间按公式(3)进行计算[16],得到多路径误差。
式中:
伪距噪声泛指导航信号产生端、传播路径、接收机端产生或引入的各种随机误差对伪距测量的综合影响值[4,5,6]。噪声作为一种偶然误差,具有一定的随机性,对观测值噪声进行分析,以便对伪距观测质量的优劣做出评价[14,15]。并且大多数用户使用廉价的单频导航接收机,伪距噪声则成为大多数用户最为关心的基本性能[1]。伪距噪声计算步骤如下:
(1)按照公式(4)对各频点各卫星伪距观测值分跟踪弧段计算历元间3次差:
式中:Δρ(ti)为某频点相邻历元伪距观测量组差值,单位为m;ρ(ti)为历元ti接收机观测到卫星在某频点的伪距观测量,单位为m;ΔÑρ(ti)为某频点相邻历元伪距观测量一次差值的组差值,单位为m;ΔÑΔρ(ti)为某频点相邻历元伪距观测量二次差值的组差值,单位为m。
(2)按照公式(5)求得伪距噪声σρ:
式中:Nρ为接收机观测到卫星在某频点相邻历元测码伪距观测量的3次差值的个数。
(3)对所有卫星某个频点的伪距噪声取平均值,并作为各系统频点的伪距观测噪声,求各系统各频点的伪距噪声的平均值作为系统的伪距噪声。
载噪比(Carrier-to-Noise Ratio,CNR)是载波信号功率与噪声功率谱密度之比。表征接收机接收到的信号质量和对信号的追踪捕获性能[17,18],是反映载波相位观测质量的指标之一[8,19]。良好信号跟踪载噪比的阀值为30~35 dBHz[20]。载噪比的计算如公式(6)所示。
式中:
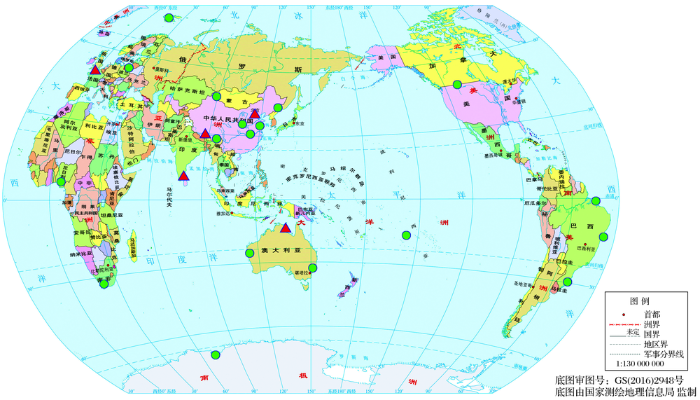
观测数据为从iGMAS全球分布的23个GNSS跟踪站(图1中圆点和三角点)中选取5个(图1中三角点),分别为北京站bjf1(中国)、拉萨站lha1(中国)、伦敦站icuk(英国)、达尔文站dwin(澳大利亚)和康提站kndy(斯里兰卡);并选取2018年5月20~29日(DOY140-149)10天连续24 h的观测数据,采样间隔为30 s,进行相关数据质量分析。以上5个跟踪站所用接收机均为国内同一厂家制造,型号及类型相同。
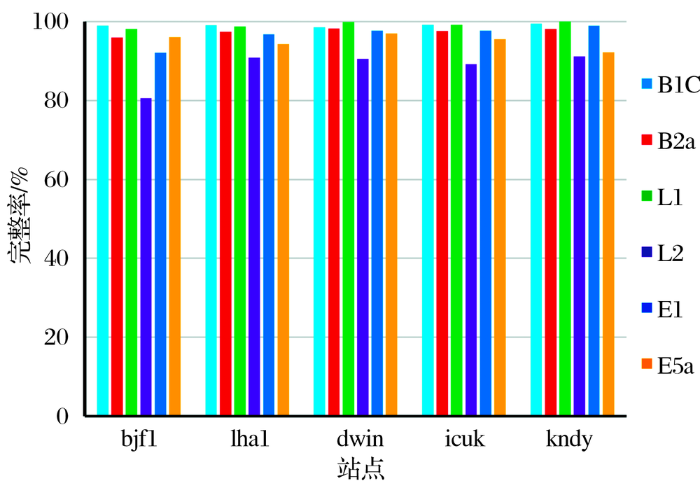
计算5个跟踪站连续10天的观测数据完整率的均值及各系统均值(表1和图2)。北斗三号12颗MEO卫星上B1C和B2a信号的完整率均在96%以上,两者均值达到98.32%,说明各接收机工作状态和测站观测条件良好。GPS的L2信号的数据完整率最低,GALILEO的E5a次之,总体而言北斗三号的数据完整率优于GPS和GALILEO。
表1 DOY 140-149 各测站观测数据完整率均值(单位:%)
Table 1 Mean integrity rate of each station observation data DOY 140-149 (unit:%)
| 信号 | bjf1 | lha1 | dwin | icuk | kndy | 均值 |
|---|---|---|---|---|---|---|
| B1C | 98.97 | 99.14 | 98.59 | 99.22 | 99.54 | 98.32 |
| B2a | 96.01 | 97.48 | 98.33 | 97.70 | 98.23 | |
| L1 | 98.20 | 98.80 | 99.90 | 99.20 | 100.00 | 93.87 |
| L2 | 80.60 | 90.90 | 90.60 | 89.30 | 91.20 | |
| E1 | 92.20 | 96.80 | 97.80 | 97.80 | 99.00 | 95.89 |
| E5a | 96.10 | 94.30 | 97.00 | 95.60 | 92.30 |
图2 DOY 140-149 各测站观测数据完整率均值
Fig.2 Mean integrity rate of each station observation data DOY 140-149
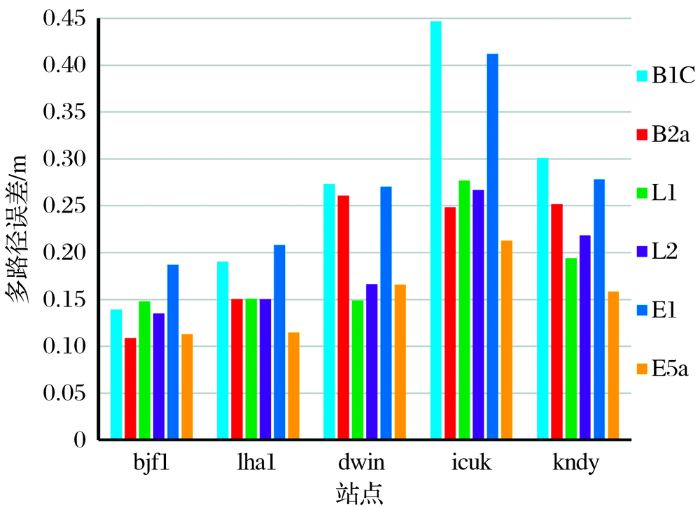
统计5个跟踪站连续10天各系统相应频点的多路径误差均值及各系统均值(表2和图3)。由表2和图3可知,由于各测站的观测环境差异,不同测站同一信号的多路径误差也存在明显差异,其中icuk和kndy 2个测站北斗三号、GPS和GALILEO 3个系统的多路径误差较大。同一系统内,北斗三号B1C的多路径误差较B2a的大;在GPS中2个信号L1和L2的多路径误差相当;在GALILEO中E5a的多路径误差小于E1,为7~10 cm,同一系统内不同信号之间多路径误差的差异可能与载波的频率大小及信号的解调方式有关。不同系统中,北斗三号B1C和B2a信号与GALILEO信号E1和E5a的多路径误差相当,GPS系统的L1和L2信号的多路径误差小于前两者,为3~5 cm。
表2 DOY 140-149 各测站多路径误差均值(单位:m)
Table 2 Mean multipath error of each station observation data DOY 140-149 (unit:m)
| 信号 | bjf1 | lha1 | dwin | icuk | kndy | 均值 |
|---|---|---|---|---|---|---|
| B1C | 0.1394 | 0.1905 | 0.2734 | 0.4469 | 0.3008 | 0.2371 |
| B2a | 0.1086 | 0.1504 | 0.2610 | 0.2483 | 0.2514 | |
| L1 | 0.1479 | 0.1505 | 0.1488 | 0.2770 | 0.1940 | 0.1855 |
| L2 | 0.1352 | 0.1501 | 0.1662 | 0.2668 | 0.2186 | |
| E1 | 0.1871 | 0.2083 | 0.2705 | 0.4122 | 0.2784 | 0.2122 |
| E5a | 0.1128 | 0.1147 | 0.1660 | 0.2130 | 0.1586 |
图3 DOY 140-149各测站多路径误差均值
Fig.3 Mean multipath error of each station observation data DOY 140-149
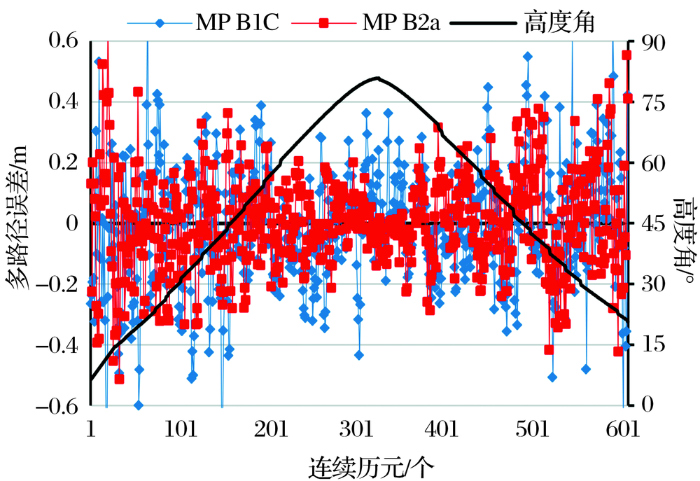
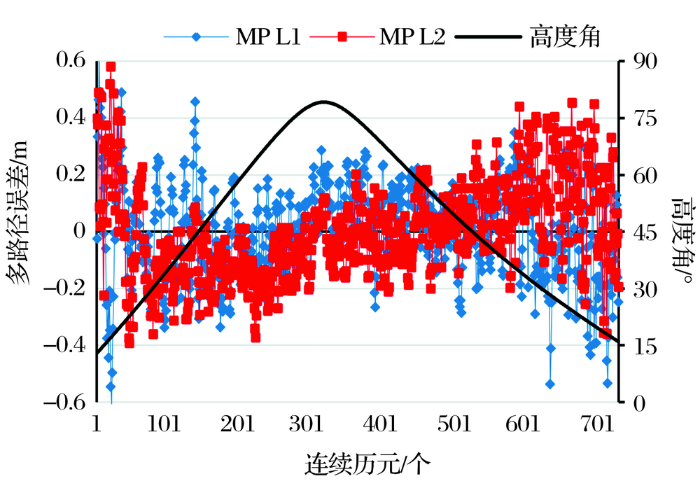
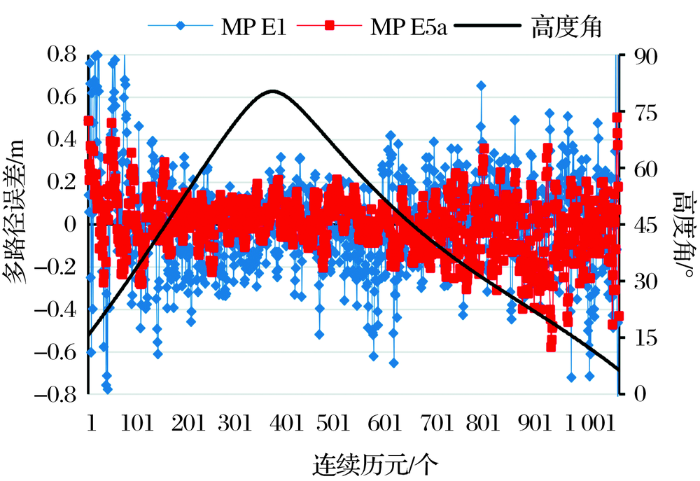
由于多路径误差不但受周围环境影响,且卫星高度角的变化也会对其造成一定的影响。以lha1为例,统计分析拉萨lha1年积日145天北斗三号C27、GPS系统G06和GALILEO系统E08 3颗卫星上相应信号的多路径误差。北斗三号系统中,卫星高度角小于30°时B2a的多路径误差与B1C相当;卫星高度角大于30°时,B2a的多路径误差小于B1C,且2个信号的多路径误差变化均较为稳定(图4)。GPS系统中,卫星高度角小于30°时L1和L5 2个信号的多路径误差波动较大,说明信号对周围环境比较敏感;卫星高度角大于30°时,2个信号的多路径误差变化较为稳定(图5)。GALILEO系统中,E5a的多路径误差变化较E1稳定,且变化波动范围较小,与表2和图3的分析一致;卫星高度角小于30°时E1和E5a两信号的多路径误差波动较大,卫星高度角大于30°时,E5a的多路径误差比E1的小而且波动也较为稳定(图6)。
图4 DOY145 lha1站北斗三号C27卫星B1C、B2a信号多路径误差
Fig.4 Multipath error of Beidou-3 C27 satellite B1C, B2a signal at lha1 station DOY145
图5 DOY 145 lha1站GPS系统G06卫星L1、L2信号多路径误差
Fig.5 Multipath error of GPS G06 satellite L1, L2 signal at lha1 station DOY145
图6 DOY 145 lha1站GALILEO系统E08卫星E1、E5a信号的多路径误差
Fig.6 Multipath error of GALILEO E08 satellite E1, E5a signal at lha1 station DOY 145
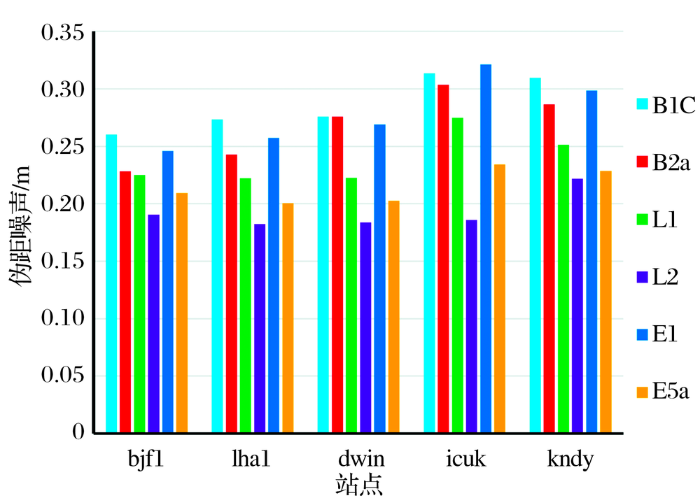
统计5个跟踪站连续10天各系统相应频点的伪距噪声均值及各系统均值(表3和图7)。由表3和图7可知,由于各测站的观测环境差异,不同测站同一信号的伪距噪声也存在明显差异,其中icuk和kndy在北斗三号、GPS和GALILEO各信号的伪距噪声明显大于其他3个站,与图3所反映的2个测站多路径误差情况一致。北斗三号B1C的伪距噪声比B2a大2 cm左右,GPS和GALILEO 2个系统的系统内信号伪距噪声均相差较大,其中L1小于L2,两者相差1~3 cm,E5a小于E1,两者相差3~8 cm。在三系统中L2的伪距噪声最小,小于B1C和B2a的伪距噪声6~10 cm,小于E1和E5a的伪距噪声2~11 cm。
表3 DOY 140-149各测站伪距噪声均值(单位:m)
Table 3 Mean pseudorange noise of each station DOY 140-149(unit:m)
| 信号 | bjf1 | lha1 | dwin | icuk | kndy | 均值 |
|---|---|---|---|---|---|---|
| B1C | 0.2600 | 0.2733 | 0.2757 | 0.3135 | 0.3094 | 0.2769 |
| B2a | 0.2281 | 0.2427 | 0.2759 | 0.3036 | 0.2866 | |
| L1 | 0.2251 | 0.2223 | 0.2227 | 0.2747 | 0.2514 | 0.2161 |
| L2 | 0.1904 | 0.1824 | 0.1839 | 0.1858 | 0.2219 | |
| E1 | 0.2460 | 0.2573 | 0.2689 | 0.3214 | 0.2987 | 0.2468 |
| E5a | 0.2095 | 0.2005 | 0.2027 | 0.2343 | 0.2285 |
图7 DOY 140-149各测站伪距噪声均值
Fig.7 Mean pseudorange noise of each station DOY 140-149
北斗三号虽然在系统内B1C和B2a信号的伪距噪声相差较小,由三系统的伪距噪声均值可知,GPS系统的伪距噪声最小,其次是GALILEO,再次为北斗三号。说明北斗三号伪距观测质量还有较大的提升空间。
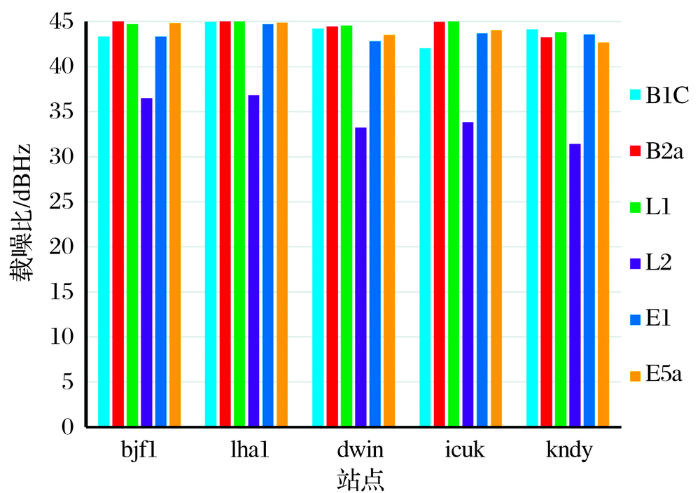
统计5个跟踪站连续10天各系统相应频点的载噪比均值及各系统均值(表4和图8)。由表4和图8可知,北斗三号新信号B1C和B2a载噪比相差不大,均大于40 dBHz,达到良好信噪比的阈值30 dBHz,且北斗三号系统新信号载噪比与GALILEO相当,优于GPS系统。GPS上L2信号载噪比较差,但也已达到30 dBHz良好阈值。
表4 DOY 140-149 各测站载噪比(CNR)均值(单位:dBHz)
Table 4 Meancarrier-to-noise ratio (CNR) of each station DOY 140-149(unit:dBHz)
| 信号 | bjf1 | lha1 | dwin | icuk | kndy | 均值 |
|---|---|---|---|---|---|---|
| B1C | 43.34 | 44.96 | 44.23 | 42.06 | 44.15 | 44.19 |
| B2a | 45.08 | 45.39 | 44.44 | 44.98 | 43.27 | |
| L1 | 44.74 | 46.03 | 44.54 | 45.69 | 43.80 | 39.66 |
| L2 | 36.49 | 36.82 | 33.24 | 33.86 | 31.44 | |
| E1 | 43.33 | 44.74 | 42.82 | 43.71 | 43.58 | 43.81 |
| E5a | 44.82 | 44.89 | 43.51 | 44.04 | 42.70 |
图8 DOY 140-149各测站载噪比均值
Fig.8 Mean Carrier-to-Noise Ratio (CNR) of each station DOY 140-149
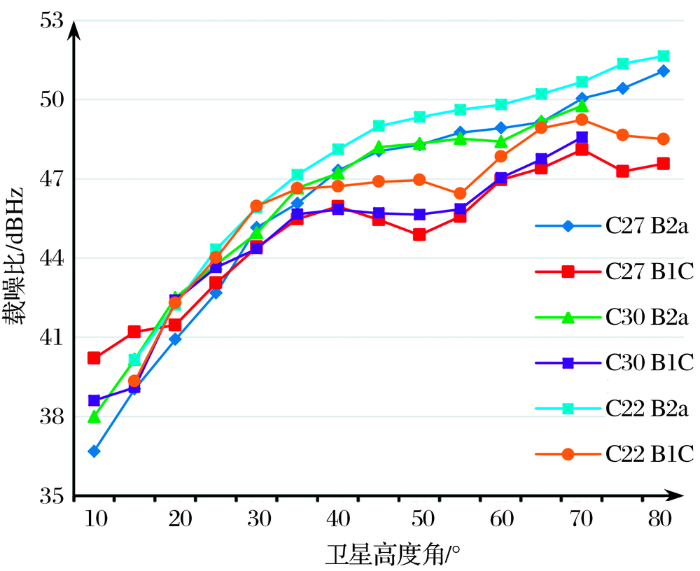
统计拉萨站lha1年积日145天北斗三号C22、C27和C30卫星上B1C和B2a信号的载噪比(图9),由图9可知,在高度角小于30°时B1C和B2a信号的载噪比相差比较小,随着高度角的增加,在30°~80°时B2a的载噪比优于B1C的载噪比3~5 dBHz。总体而言3颗卫星B1C和B2a的载噪比随高度角变化基本一致,说明北斗3号这3颗卫星的工作性能相当,即北斗三号系统在各颗MEO卫星建设上的一致性和统一性。
图9 DOY 145拉萨站lha1北斗三号C22、C27和C30卫星载噪比
Fig.9 CNR of Beidou-3 satellites C22, C27 and C30 at lha1 station DOY 145
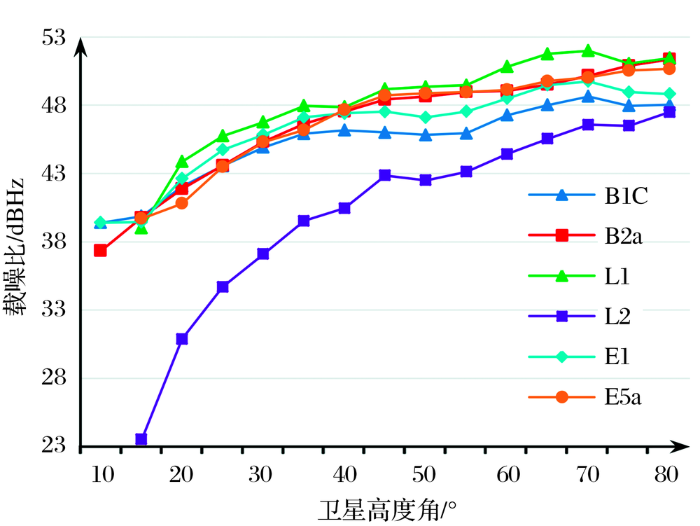
统计拉萨站lha1年积日145天北斗三号、GPS和GALILEO 3系统相应信号的载噪比(图10)。由图10可知,各系统信号载噪比均随高度角的增加而呈上升趋势,其中北斗三号B2a的载噪比优于B1C的载噪比1~2 dBHz;GPS上L2信号的载噪比较差,其原因是某些GPS卫星上L2信号本身载噪比较差,L1与L2的载噪比也相差较大;GALILEO上E1和E5a信号的载噪比相差在1 dBHz以内。北斗三号的B2a、B1C与GPS上L1和GALILEO上E1和E5a信号的载噪比相当,从而反映了北斗三号在信号系统的建设上与相对成熟的GPS和建设较早的GALILEO处于同一水平。
图10 DOY 145 lha1站各系统相应频点载噪比
Fig.10 CNR of signals corresponding to each system at lha1 station DOY 145
GNSS观测数据质量是决定GNSS服务质量的重要因素,同时也是GNSS系统运行性能的综合体现,我国北斗三号目前已经发射16颗MEO卫星,对其观测数据质量的分析评估,一定程度上能反映系统的建设情况。
本文基于同一生产厂家、同一类型和同一型号接收机的5个iGMAS全球GNSS跟踪站连续10天的观测数据,从观测数据完整率、多路径误差、伪距噪声和载噪比等4个方面,对北斗三号卫星播发的新信号B1C和B2a进行综合数据质量分析评估,并与GPS和GALILEO系统进行比较,结果表明:①北斗三号B1C和B2a信号的完整率均在96%以上,其接收机观测数据的完整率达到98.32%。B2a信号的多路径误差小于B1C,为 3~10 cm,在高度角大于30°时,2个信号的多路径误差变化波动范围比较稳定。B2a的伪距噪声小于B1C,为 2~3 cm。B1C和B2a载噪比相差不大,均大于40 dBHz,系统载噪比为44.19 dBHz,且随高度角的增加B1C和B2a的载噪比也随着增大,单颗卫星上B2a的载噪比优于B1C的载噪比3~5 dBHz。总体反映了北斗三号卫星的工作性能相当,即北斗三号系统在各颗MEO卫星建设上的一致性和统一性。②与GPS和GALILEO相比,北斗三号的数据完整较好,优于GPS和GALILEO数据完整率3%~5%。多路径误差北斗三号与GALILEO相当,均次于GPS系统3~5 cm。在伪距噪声方面,GPS优于GALILEO和北斗三号,且北斗三号伪距噪声较大,这也是限制其单频用户定位精度的一个重要原因。北斗三号的载噪比与GALILEO相当,均优于GPS系统约4 dBHz。至于三系统的以上差异是否与接收机的生产技术及制造工艺有关,还有待进一步研究。
总体而言,我国北斗系统建设虽然起步较晚,但在短时间内建成16颗MEO北斗三号全球系统,且就观测数据质量而言,新信号B1C和B2a在播发和接收方面均运行正常,除伪距噪声较大外,数据完整率、多路径误差和载噪比均与相对成熟的GPS系统和起步较早的GALILEO系统处于同一水平。以上工作以期为北斗测量型GNSS接收机的研制、指标检定,全球跟踪站选址,北斗三号卫星定轨、钟差计算、GNSS数据处理,北斗及iGMAS相应GNSS观测数据质量标准的编写提供一定的参考。
致 谢:非常感谢信息工程大学、中国矿业大学和长安大学3个单位iGMAS分析中心给予的帮助和支持。
The authors have declared that no competing interests exist.
| [1] |
Progress and performance evaluation of Bei Dou Global Navigation Satellite System: Data analysis based on BDS-3 demonstration system [J].北斗三号系统进展及性能预测——试验验证数据分析 [J]. |
| [2] |
|
| [3] |
Some notes on interoperability of GNSS [J].GNSS互操作若干问题 [J].
GNSS兼容与互操作是国际卫星导航领域的热点议题,也是用户实现多系统融合导航必须具备的条件。本文首先介绍了兼容与互操作的基本概念;简要分析了多GNSS系统互操作的基本趋势及GNSS4大核心系统信号互操作的现状;分析了现有北斗卫星导航系统(BDS)在信号互操作方面存在的问题,指出其对用户接收机制造商和多GNSS用户的影响;分析了坐标基准和坐标框架在互操作方面存在的问题及其可能带来的影响,指出坐标系统的实现、维持甚至更新策略带来的误差都可能给多GNSS互操作及导航定位结果带来影响;讨论了时间基准互操作存在的问题,以及可能的解决措施。最后归纳了本文的主要结论。
|
| [4] |
Quality assessment of the Beidou-3 new generation experimental satellites observation data [J].北斗新一代试验星观测数据质量分析 [J]. |
| [5] |
Research on Comprehensive Quality Evaluation Method of BDS Tri-band Observations [D].BDS三频观测数据综合质量评估方法研究 [D]. |
| [6] |
Development and Applications of GNSS Data Quality Assessment Software [D].GNSS数据质量评估软件研制与应用 [D]. |
| [7] |
Software design and implementation for Beidou data quality analysis [J].北斗数据质量分析软件设计与实现 [J].
随着北斗卫星导航系统的发展,北斗卫星数据在许多领域得到广泛应用,对北斗数据质量的监测变得越来越重要。文中在Visual Studio 2008开发平台下基于C++语言,设计并实现北斗数据质量分析软件,分析软件具有分析观测数据中多路径误差、周跳、载噪比、数据可用率和电离层延迟等信息的功能。利用开阔环境、树林环境、玻璃幕墙环境中的观测数据对分析软件进行测试,结果表明,分析软件能够真实反映出观测数据的质量情况。
|
| [8] |
Research on Evaluation Methods for Multi-GNSS Data Quality and Integrity [D].多GNSS观测数据质量与完好性评价方法研究 [D]. |
| [9] |
|
| [10] |
|
| [11] |
A new method to assess the quality of Bei-Dou tri-band observation data [J].一种新的方法对北斗三频观测数据质量进行评估 [J].
针对北斗导航系统的测距信号,特别是载波相位观测值的精确与否将直接影响其精密应用,因此本文通过伪距多路径误差和载波相位噪声两个方面对北斗三频观测数据质量进行分析。利用伪距载波相位组合法推导出三频信号的多径误差估计模型:并针对零基线双差法对载波相位观测值精度评估时,必须要求在同一个测站有两个相同型号的接收机对两颗卫星的三频观测数据的情况.提出利用无几何相位无电离层组合法,实现单个接收机对单个卫星接收到的三频载波相位观测值精度进行正确评估。通过实测数据验证,发现采用三频多路径估计模型对伪距多径误差估计精度高.且数据利用率高;伪距多路径误差以及卫星载波相位观测值精度均与卫星高度角成正比。当卫星高度角大于40°左右,载波相位观测值精度均在3mm以内。
|
| [12] |
Triple-frequency GPS precisepoint positioning with rapid ambiguity resolution [J].
AbstractAt present, reliable ambiguity resolution in real-time GPS precise point positioning (PPP) can only be achieved after an initial observation period of a few tens of minutes. In this study, we propose a method where the incoming triple-frequency GPS signals are exploited to enable rapid convergences to ambiguity-fixed solutions in real-time PPP. Specifically, extra-wide-lane ambiguity resolution can be first achieved almost instantaneously with the Melbourne-Wübbena combination observable on L2 and L5. Then the resultant unambiguous extra-wide-lane carrier-phase is combined with the wide-lane carrier-phase on L1 and L2 to form an ionosphere-free observable with a wavelength of about 3.402m. Although the noise of this observable is around 100 times the raw carrier-phase noise, its wide-lane ambiguity can still be resolved very efficiently, and the resultant ambiguity-fixed observable can assist much better than pseudorange in speeding up succeeding narrow-lane ambiguity resolution. To validate this method, we use an advanced hardware simulator to generate triple-frequency signals and a high-grade receiver to collect 1-Hz data. When the carrier-phase precisions on L1, L2 and L5 are as poor as 1.5, 6.3 and 1.502mm, respectively, wide-lane ambiguity resolution can still reach a correctness rate of over 9902% within 2002s. As a result, the correctness rate of narrow-lane ambiguity resolution achieves 9902% within 6502s, in contrast to only 6402% within 15002s in dual-frequency PPP. In addition, we also simulate a multipath-contaminated data set and introduce new ambiguities for all satellites every 12002s. We find that when multipath effects are strong, ambiguity-fixed solutions are achieved at 7802% of all epochs in triple-frequency PPP whilst almost no ambiguities are resolved in dual-frequency PPP. Therefore, we demonstrate that triple-frequency PPP has the potential to achieve ambiguity-fixed solutions within a few minutes, or even shorter if raw carrier-phase precisions are around 102mm. In either case, we conclude that the efficiency of ambiguity resolution in triple-frequency PPP is much higher than that in dual-frequency PPP.
|
| [13] |
|
| [14] |
Research of pseudorange weight assessment algorithm based on pseudorange noise [C]∥基于伪距噪声的伪距定权算法研究 [C]∥ |
| [15] |
|
| [16] |
Experimentation and analysis of multipath effect in Pseudo-range measurement of GNSS receiver [J].
GNSS接收机伪距测量中的多径效应试验分析 [J].URL 摘要
多径效应是影响GNSS接收机观测数据质量的主要因素之一,会导致GNSS接收机测量精度降低。为研究和掌握GNSS接收机伪距测量中的多径效应特性,通过试验分析GNSS接收机采用扼流圈天线和大口径抛物面天线条件下的多径效应,城区和郊区环境条件下的多径效应,以及GNSS接收机不同跟踪环路参数条件下的多径效应。试验分析结果表明:多径效应对GNSS接收机观测数据的影响与信号特性、卫星种类、接收机通道设计及天线安装环境等各种因素相关。GNSS接收机采取三方面措施抑制多径误差,抗多径天线、基带信号处理以及数据后处理,但消除多径误差最有效的措施是先进的信号体制设计和良好的天线安装场站选择。
|
| [17] |
|
| [18] |
Research on Processing Method of GNSS Station Environment Error and Its Application Using SNR Data [D].基于GNSS信噪比数据的测站环境误差处理方法及其应用研究 [D]. |
| [19] |
Multi-GNSS Real-time Data Analysis and Software Implementation [D].多系统GNSS实时数据质量分析及软件实现 [D]. |
| [20] |
|

/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}