微波雷达双边滤波云检测新方法的研究
葛觐铭( ),胡晓宇,王晨,董自香,杜佳璟
),胡晓宇,王晨,董自香,杜佳璟
),胡晓宇,王晨,董自香,杜佳璟
A Novel Bilateral Filter Hydrometeor Detection Method for Microwave Radar
Jinming Ge(),Xiaoyu Hu,Chen Wang,Zixiang Dong,Jiajing Du
),Xiaoyu Hu,Chen Wang,Zixiang Dong,Jiajing Du
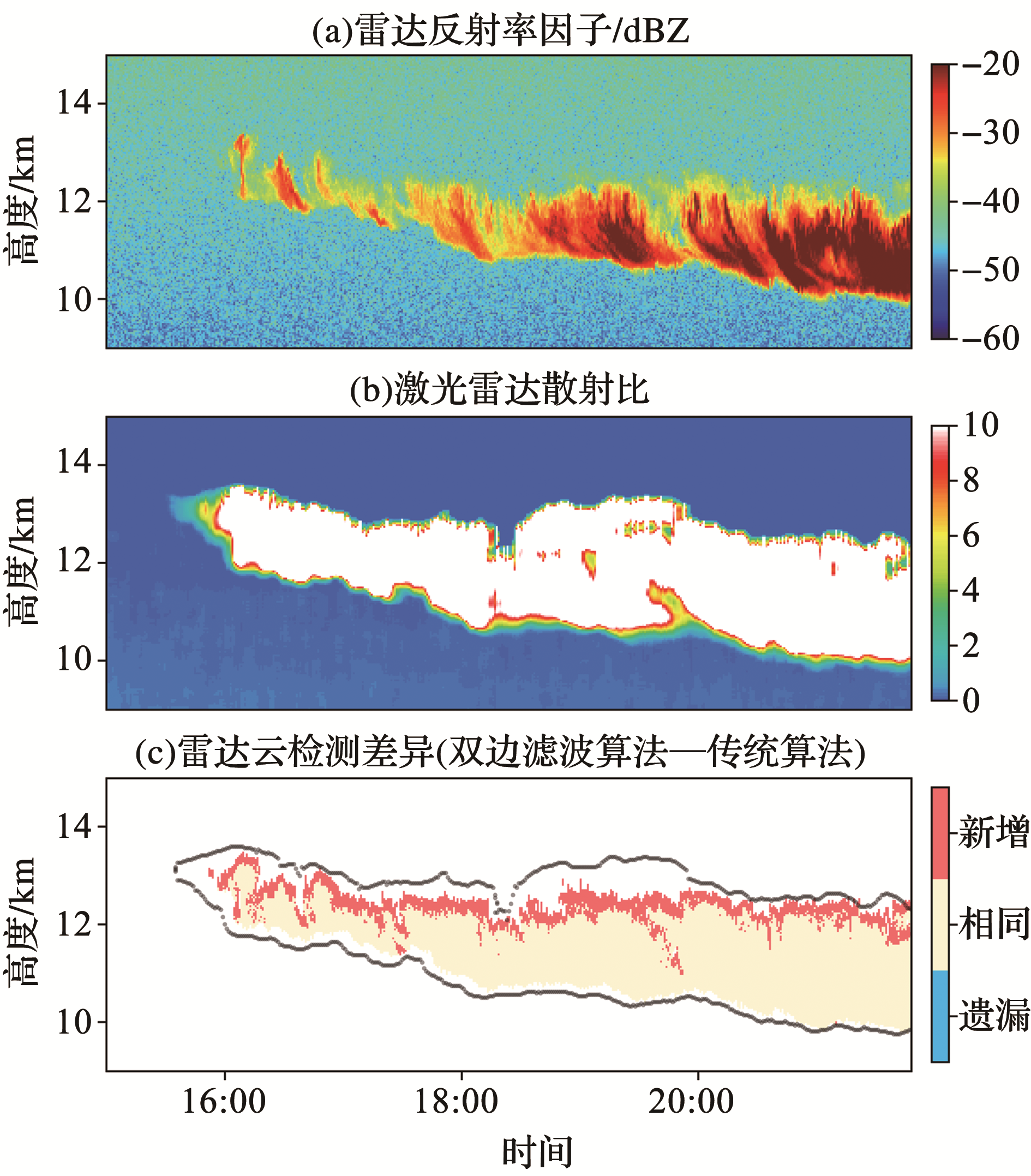
图5. 2013年8月18日15:00-22:00地基雷达云检测算法结果
(c)中红色表示双边滤波算法相比传统算法多识别的云信号,黄色表示两种方法同时检测到的云,蓝色表示双边滤波比传统算法遗漏的云信号,黑点表示激光雷达特征检验算法识别的云边界
Fig.5. The result of hydrometeor detection method for ground-based cloud radar from 15:00 to 22:00 on 18 August 2013
In Fig. (c), red indicates the cloud mask detected by the bilateral filter algorithm but not by the traditional algorithm, yellow indicates the cloud mask detected by both methods simultaneously, blue indicates the cloud mask missed by the bilateral filter algorithm compared to the traditional algorithm,and black dots indicate the cloud boundaries identified by the lidar feature detection algorithm