微波雷达双边滤波云检测新方法的研究
葛觐铭( ),胡晓宇,王晨,董自香,杜佳璟
),胡晓宇,王晨,董自香,杜佳璟
),胡晓宇,王晨,董自香,杜佳璟
A Novel Bilateral Filter Hydrometeor Detection Method for Microwave Radar
Jinming Ge(),Xiaoyu Hu,Chen Wang,Zixiang Dong,Jiajing Du
),Xiaoyu Hu,Chen Wang,Zixiang Dong,Jiajing Du
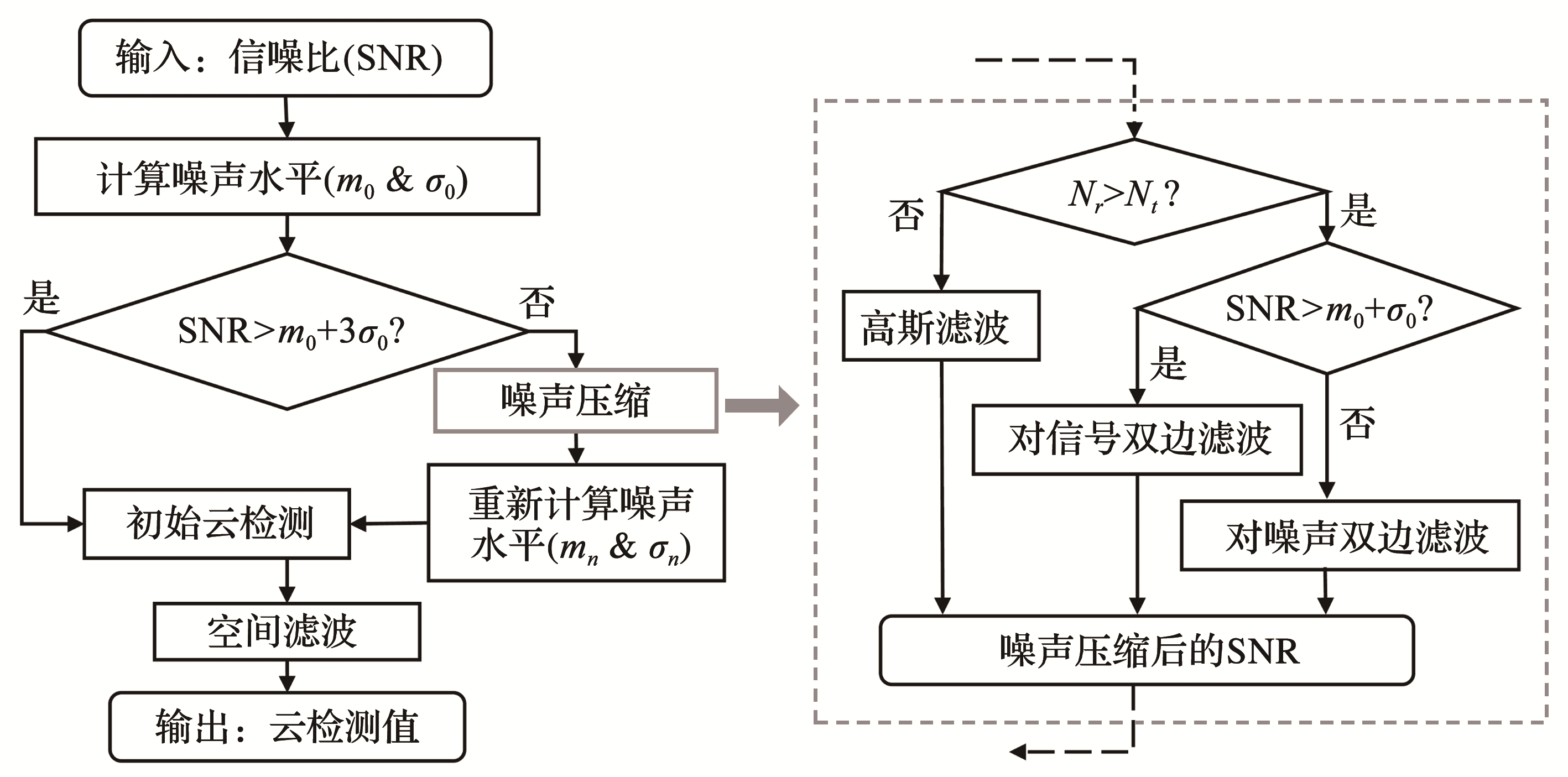
图3. 地基雷达云检测算法流程图
m和σ分别为噪声的平均值和标准差,下标
Fig.3. Flowchart of ground-based radar cloud detection algorithm
m and σ are the mean and standard deviation of the noise,respectively; Subscript 0 and n mean original and compressed noise;