

1 引 言
物理模型实验可以再现模拟对象的发展演化过程,在此基础上可以验证研究对象的变形及运动规律,广泛应用于土木工程、采矿工程及地球科学等领域[1~3]。物理模型实验主要包括底摩擦实验[4]、转鼓实验[5,6]、离心机实验[7]和常重力框架模型实验[8~10]等,虽然其侧重点不同,但都是在相似理论的基础上按照一定的比例制作物理模型。例如,通过构造物理模型实验模拟自然界的地质构造变形特征、成因机制和动力学过程[11,12],通过滑坡物理模型实验研究滑坡运动堆积规律[13],通过大型物理模型实验开展地裂缝扩展机理研究[14]等。准确采集实验过程中的定量数据对后期开展实验分析至关重要,这些数据主要包括监测点的物理变量(如雨量、位移、孔压、水位、变形和应力等)及实验前后两个时刻的三维地形地貌数据,前者主要依靠相关数据采集设备来记录实验过程的数据变化,后者主要采用三维激光扫描技术采集实验前后两期的静态地形数据[15,16]。由于测试手段的限制,实验过程中的动态地形地貌数据获取方面还不够理想,目前主要采用条纹投影法和立体摄影系统。条纹投影法分辨率取决于条纹的间距,将其应用于物理模型实验分辨率很难达到10 mm[17]。现有的立体摄影系统分辨率也较低,如Primesense Carmine 1.09分辨率仅为640×480。例如,Caviedes-Voullième等[18]将其应用于模型实验局部区域的三维地形数据获取,但由于传感器尺寸的限制,导致影像数据的动态模糊现象非常明显,同时也影响了地形地貌数据的可靠性,若将其应用于获取实验全局的地形地貌,分辨率将进一步降低。因此,探索一种更高分辨率的动态地形数据获取方法显得十分必要。
随着数字摄影测量技术的不断发展,为探索物理模型实验动态地形数据记录方法提供了新的思路。常规摄影测量通常使用一台相机在不同方位拍摄保持静止目标的交会图像序列,以此获得被测物的空间三维信息,广泛应用于考古、文物保护、工程结构、生态保护、医学工程、采矿工程、管线工程、环境工程和气象学等众多领域[19]。动态摄影测量系统由多台相机同步采集被测物图像,在此基础上获得不同采样时刻被测对象的瞬态空间三维信息,现已逐步应用到变形测量、材料和结构测试、风洞测试、手术导航、运动捕捉等领域[20]。而在地学领域,目前主要采用静态摄影测量技术开展相关研究工作[21]。Eltner等[22]曾尝试利用3台数码相机以15 s间隔开展降雨导致土壤地表变化的实验研究,因数据采集时间间隔较长,采用低帧率视频即可完成实验需要的拍摄工作,这对于获取慢速变化的地形数据是有效的。随着现有消费级数码相机性能的提升,某些相机甚至可以完成1 000 FPS的高帧率拍摄任务,这为动态地形数据的高速采集工作提供可能。
本文以某碎屑流物理模型实验为例,详细介绍基于动态摄影测量技术的四维影像重构技术的工作流程,在此基础上,探索动态地形数据的提取方法,并对这些数据进行详细的实验分析。这将促使后期实验分析工作产生巨大变化,也会得出更多有意义的实验结论。
2 实验设备
2.1 斜槽装置
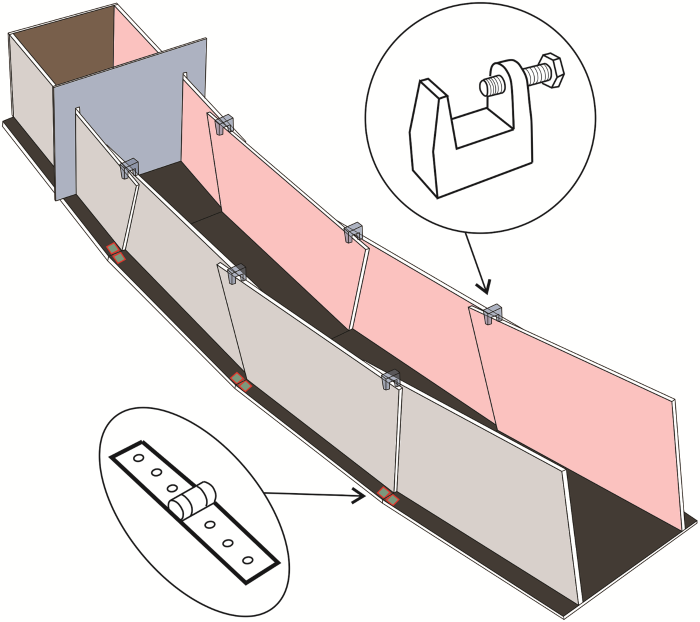
如图1所示,斜槽装置由4段独立的斜槽组成,斜槽底部使用合页链接。可以根据实验需要,将底板设置为不同的倾斜角度,并在侧板的顶部采用U型夹固定实验装置。斜槽顶端设置料仓,其开合由抽取式挡板控制,斜槽末端开放,允许部分颗粒自由滑出,而不会影响其他碎屑颗粒的停积。每段槽体(包含料仓)长宽高分别为500、223和250 mm。顶端料仓内部空间尺寸为300 mm×223 mm×250 mm。槽体侧板采用8 mm厚透明有机玻璃制作而成,为避免反光影响拍摄质量,在前侧板贴有半透明的磨砂膜,在后侧板贴有尺寸为10 mm×10 mm网格纸,以便后期尺寸校准。斜槽底板采用10 mm厚黑色有机玻璃制作而成,为提高摄影测量效果,在底板表面绘制了一定数量的纹理图案。提拉料仓门后,碎屑颗粒将在槽内加速运动,颗粒在运动过程中不断耗能减速,并最终停积在斜槽内部。
图1
2.2 数据采集设备
在斜槽顶部设置3台SONY DSC-RX100M5相机记录实验过程的慢动作视频,采用千分秒表记录实验过程的时间,将其作为提取同一时刻相片的依据。并在实验装置的正面采用Nikon D750单反相机观察实验各阶段的运动特征和颗粒的堆积厚度数据。为获取具有正确坐标的三维空间影像数据,需要在斜槽的侧壁布设一定数量的像控点(本实验共布设像控点18个)。同时,为了验证动态摄影测量地形地貌数据的可靠性,制作了可以发射若干等间距水平条纹的激光投影装置,并将其设置在斜槽装置的前端。碎屑流物理模型实验设备的全貌如图2所示。
图2

图2
碎屑流模型实验设备全貌图
Fig.2
The experiment device schematic diagram of debris avalanche
3 实验方法
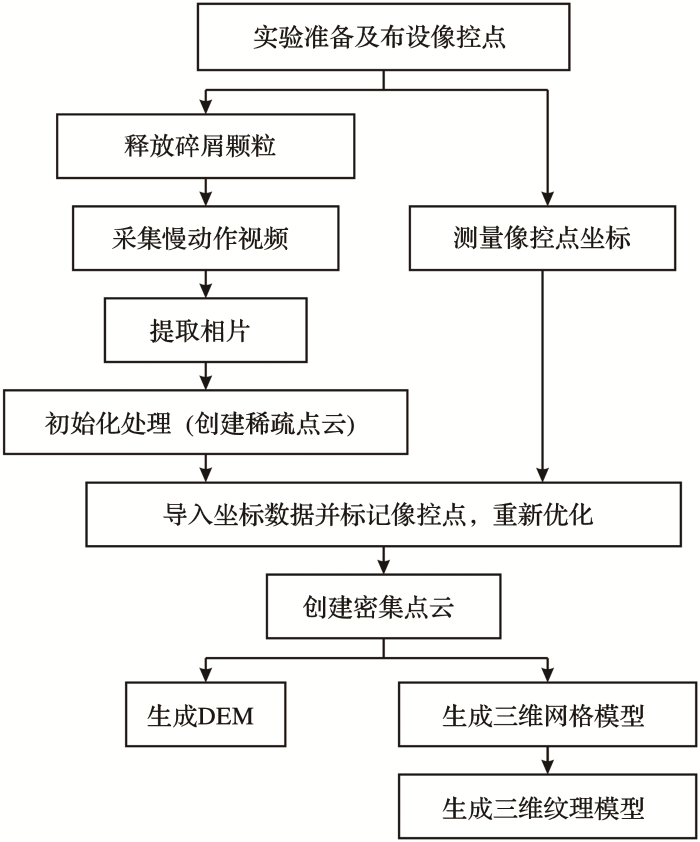
动态摄影测量的基本工作流程包括实验准备、布设控制点、测量像控点、采集慢动作视频、提取相片、初始化处理、标记像控点、创建密集点云、生成三维网格、生成数字高程模型(Digital Elevation Model, DEM)数据和生成三维纹理模型等几个步骤,具体工作流程如图3所示。
图3
3.1 实验分组
为分析颗粒粒度、坡面倾角及坡面阻挡等因素对碎屑流的影响,共设计了8组实验开展研究工作。主要根据2种粒度、3种坡面形状和阻挡位置的高低进行对比组合,研究碎屑颗粒分别在不同实验条件下的堆积体积、堆积厚度和运动时间的不同表现(表1)。
表1 碎屑流模型实验分组依据
Table 1
| 序号 | 颗粒大小 | 坡面形状 | 阻挡位置 |
|---|---|---|---|
| 实验 1 | 粗粒 | A | 无 |
| 实验 2 | 细粒 | A | 无 |
| 实验 3 | 粗粒 | B | 无 |
| 实验 4 | 细粒 | B | 无 |
| 实验 5 | 粗粒 | B-1 | 上 |
| 实验 6 | 粗粒 | B-2 | 下 |
| 实验 7 | 粗粒 | C | 无 |
| 实验 8 | 细粒 | C | 无 |
实验材料包括2种粒度,粗颗粒为机械打磨石英石,粒径为4~6 mm,细颗粒为石英砂,粒径为30目。每组实验颗粒的质量均为22.4 kg,粗颗粒堆积体积为13 997.1 cm3,细颗粒的堆积体积为17 535.6 cm3。
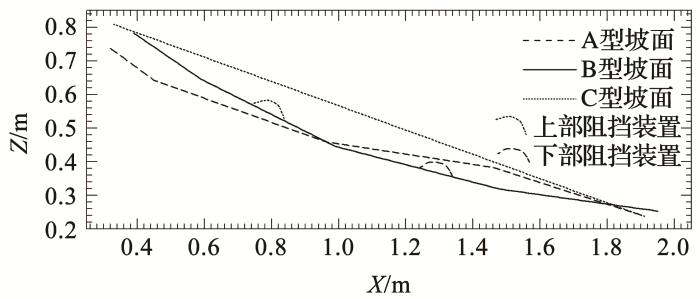
通过改变坡面的倾斜角度来研究其对颗粒运动速度的影响(坡面形状如图4所示)。A型坡面(具有明显的缓冲平台)从上往下依次为36.3°、19.7°、8.7°和17.9°,B型坡面(倾角过渡平稳)从上往下依次为34.4°、26.6°、14.5°和7.9°,C型坡面(坡面倾角保持不变)倾角为19.9°。另外,在B 型坡面上部(B-1)和下部(B-2)中心线上分别设置球缺状阻挡装置,球缺的半径为45 mm,高为35 mm。上部球缺底面圆心的坐标为X = 800 mm,Z=540 mm,所在区域的坡面坡度大约为26.6°。下部球缺底面圆心的坐标为X=1 300 mm,Z=365 mm,所在区域的坡面坡度大约为14.5°。
图4
3.2 实验数据采集
实验过程(碎屑颗粒释放→流动→停积)的影像数据主要通过斜槽顶部的3台数码相机进行采集,依据千分秒表记录的时间提取同一时刻的影像相片,并利用近景摄影测量技术创建相应时刻的三维空间影像数据。首先,按照实验分组要求准备实验材料和实验装置,确保激光条纹投影设备、正面相机和秒表计时器在实验正式开始前处于工作状态。斜槽顶部3台相机调整为相同拍摄参数,本实验相机采集系统的参数设置如表2所列。同时,若要获得满足实验精度需求的空间影像数据,需要在实验设备上设置像控点(具体布置见图2)。可以采用任何满足精度要求的坐标测量仪器测量像控点的坐标,本实验采用全站仪免棱镜测量方式采集像控点的坐标。另外,由于DSC-RX100M5相机采集慢动作视频的时间只有3~7 s,本实验碎屑颗粒在斜槽中的运动时间只有1.5~2.0 s,且慢动作视频的拍摄时间必须完全覆盖碎屑流的运动过程。因此,实验采集过程由2名实验人员配合完成,其中一人负责开启料仓门,另外一人控制相机拍摄开关,确保视频采集时间早于料仓门开启时间1 s左右。
表2 相机采集系统参数
Table 2
| 基本参数 | 参数值 |
|---|---|
| 传感器尺寸 | 13.2 mm×8.8 mm |
| 记录像素 | 1 920×1 080,250 fps |
| 有效像素 | 1 824×1 026,250 fps |
| 拍摄时间 | 约4 s(质量优先模式) |
| 焦距(35 mm换算) | 26 mm |
| 拍摄模式 | HFR |
| 曝光模式 | 快门优先(S) |
3.3 模型重建
目前主流的摄影测量建模软件主要有smart3D Capture、Pix4Dmapper和Agisoft PhotoScan等,可以根据项目的特点选择合适的计算软件。smart3D Capture和Pix4Dmapper无多帧计算功能,需要对每帧进行单独计算,工作量较大。Agisoft PhotoScan可以为多帧图像创建一个区块来进行三维建模,且可以获取每一帧的计算结果,推荐选用该计算软件作为动态摄影测量的计算方案。另外,若实验过程中相机摆动过大,为避免帧与帧之间互相影响,作者建议将所有帧拆分为单独的区块进行批量计算。首先,分别对3台相机采集的实验数据进行视频抽帧,并依据秒表计时器的时间值选择同一时刻的照片进行组合建模。然后依据近景摄影测量方法[19]即可建立实验全过程的时间序列模型。
4 数据成果及后处理
实验表明,虽然本实验的可重复性较强,但实验过程中难免会因为各种原因导致实验出现一定偏差。为避免这个问题,每组实验均需完成3次以上,并选取重复性最高(颗粒运动时间和距离相近)的某次实验开展三维建模及成果分析工作。另外,实验过程相机的数据采集帧率为250 fps,也就是说每帧的间隔为4 ms,2 s时长将产生500组实验数据,这样庞大的数据给后续数据计算和处理带来巨大的挑战,同时,我们也并不关心每个时间节点的数据。因此,本实验计算间隔设置为40 ms,即在原始数据上每间隔9帧选取1组数据参与三维建模计算。
4.1 数据成果
获取的空间影像数据主要包括三维点云数据、三维网格模型和三维图像模型等。图5为实验6在840 ms时刻的数据成果,其中三维图像模型像素分辨率达到1.19 mm/pix,这种高精度三维图像模型,足以分辨毫米级的实验细节。研究者可以根据应用需求选择相应的数据成果开展研究工作,本文的主要目的是开展动态地形数据的实验应用分析,选用点云数据作为基础数据即可开展碎屑颗粒的运动机理分析工作。
图5
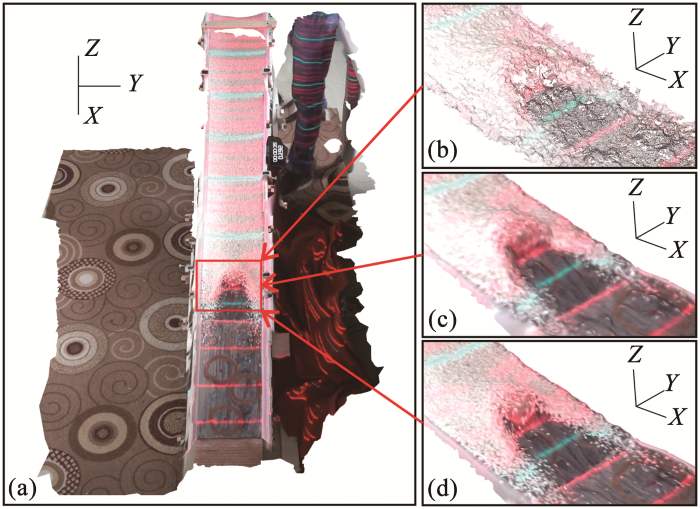
图5
动态摄影测量空间影像数据
(a)全局影像数据; (b)点云数据; (c)网格模型; (d) 图像模型
Fig.5
The 3D image data of dynamic photogrammetry
(a) Full image data; (b) Point cloud data; (c) Mesh data;(d) Texture data
4.2 数据成果对比
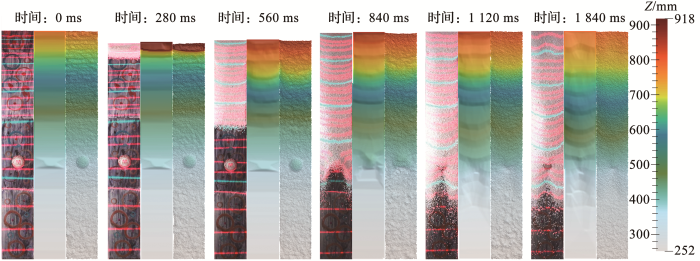
为验证动态摄影测量获取的物理模型实验数据的适用性和可靠性,通过激光投影技术[23]获取了实验全过程的动态三维地形数据。基本工作原理为:在实验设备的右侧设置激光条纹投影设备向斜槽坡面投射一系列平行的激光条纹(图2),并在实验设备正上方采集实验过程中的瞬态影像,实验结束后对影像进行畸变矫正以后就可以提取影像中的等高线,在此基础上,即可得到实验过程中的瞬态三维地形数据。图6给出了实验6在典型时间节点的3数据成果(左中右分别表示影像数据、激光投影技术数据和动态摄影测量数据)。与激光投影技术相比,显然动态摄影测量获取的地形数据细节更加丰富。当然也可以增加激光条纹的数量来获取更加精细的地形数据,但由于投影到坡面的条纹本身具有一定的宽度(本实验约为5 mm),因此,通过减小条纹间距对提高成果分辨率效果十分有限。本实验的等高距为20 mm,最后获得的地形数据出现了较为显著的阶梯现象,最显著的是,在对球缺状阻挡物的表达上已经完全失真了。另外,激光投影技术只能获取实验的三维地形数据,而动态摄影测量获取的数据包括三维地形、三维网格模型和三维图像模型,后者的适用范围明显更大。
图6
4.3 数据后处理
摄影测量获取的数据成果不仅包括颗粒表面的瞬态三维信息,还包含实验设备和附属设施的三维信息,后者不是本实验关注的对象,因此需要将其进行剪切处理。虽然这些工作也可以在相应的摄影测量计算软件中手动完成,但动态摄影测量将产生了大量的三维模型序列,若对这些数据完全采用手工方式处理,是很不明智的选择,因此,寻找一种高效的数据处理工具显得十分必要。PolyWorks可以对三维点云及网格数据进行分析及处理,是一款高效的3D测量检测和分析软件,在机械、汽车和航空航天等领域应用广泛。利用PolyWorks创建宏脚本自动化批量处理实验数据将使这项工作更加轻松。对于处理好的三维模型数据,就可以利用ArcGIS进行地图绘制和三维空间分析。同样,在Python编程语言的支持下,利用ArcGIS对这些时间序列数据进行批量化处理,将使数据的统计分析工作更加便捷和高效。
5 成果分析
以往的同类实验通常无法获取实验过程的瞬态地形数据,而对这些数据成果进行详细分析将得出很多有益的结论。另外,需要说明的是,以下讨论分析的实验结束时间是以斜坡后部颗粒无明显运动为止。这里主要通过对比相邻相片的变化量来判断颗粒的运动状况,为避免人工识别带来的误差,借助计算机的判断将使结果更加客观和可靠。PIVlab可以计算粒子图像的速度分布,还可以用来推导、显示和导出流型的多个参数。该计算程序[24]是Thielicke和Stamhuis开发的Matlab工具箱,具有良好的图形用户界面。因此,借助该工具可有效判断颗粒的运动状态,当位移计算值为零时,即判定为实验停止时间。另外,以下所有颗粒的堆积体积仅包含滑出料仓的碎屑颗粒,所有计算点的厚度是指该点沿竖向到坡面的距离,而非该点到坡面的最短距离。
5.1 堆积体积演化
将获取的瞬态地形数据与原始坡面地形数据进行差分求解后,可得到滑坡变形演化全过程的体积变化数据。如图7a所示,随着碎屑颗粒不断滑出料仓,坡面颗粒堆积体积也在不断增加,且体积堆积曲线具有明显的阶段性特征。启动阶段,由于料仓门设计为抽提式,仓门从开启到完全抽出用时大约120 ms,这段时间仓门开口经历了一个增大的过程,因此碎屑颗粒的体积增大速率较慢;加速阶段,当料仓门完全打开后,所有颗粒一起冲向坡下,体积增加速度迅速增大;持速阶段,体积的增长量保持相对稳定;减速阶段,随着碎屑颗粒运动距离的增加,能量损耗也逐渐增大,颗粒将进行减速运动并最终停积下来。需要说明的是,在120~250 ms体积变化曲线波动异常,特别是实验3和实验6尤为明显,实验过程视频资料显示,在料仓门开启后约有100 ms遮挡了相机的部分视线,造成无法获取仓门开口附近的完整地形数据。
图7
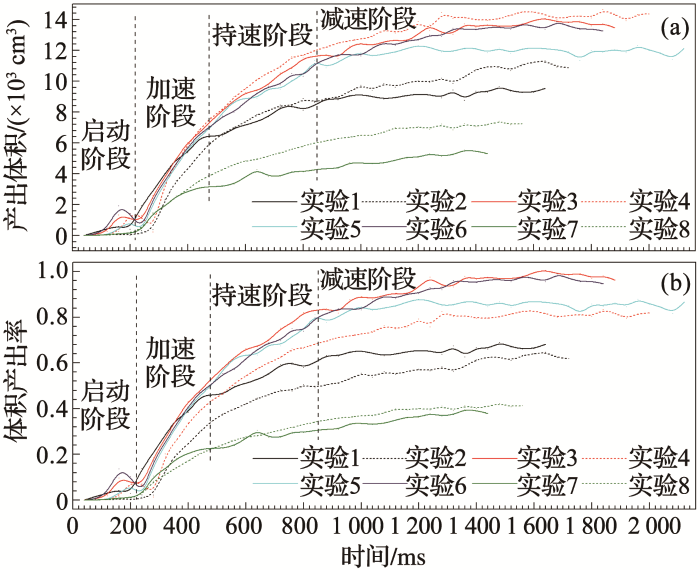
图7
碎屑颗粒体积变化曲线
(a)总体积; (b)体积产出率
Fig.7
Temporal evolution of volume for granular mass
(a) Total volume ;(b) Production rate of volume
实验发现,坡面角度、颗粒粒度及坡面阻挡等因素对碎屑颗粒的堆积体积和运动时间也具有很大影响。且坡面角度是影响堆积体积和运动时间的主要因素,如图7a所示,B型坡面(实验4~6)碎屑颗粒的堆积体积和运动时间最长,3种坡面的次序依次为:B>A>C。B 型坡面类似于向下弯曲的曲线,因最初的两段坡面倾斜角度较大,碎屑颗粒将得到充分加速运动,且平缓过度的坡脚有利于碎屑颗粒的逐级停积;A 型坡面虽然碎屑颗粒也经历了一定时间的加速运动,但当颗粒运动到第三段斜面时,遇上了倾角仅为8.7°的卸荷平台,碎屑颗粒能量受到巨大亏损,大量碎屑颗粒被阻挡在该平台之后;C型坡面各段的倾斜角度完全相同,由于坡面倾斜角度偏小,碎屑颗粒未经历充分的加速运动,导致颗粒的堆积体积和运动时间最小。
从所有对照组来看,粗粒组的运动时间更短,且由于粗粒组的初始体积小于细粒组,导致粗粒组最终堆积体积小于细粒组。而颗粒的体积产出率(滑出料仓的颗粒体积与总体积的比值)却发生了反转:对于A型和B型坡面,粗粒组的体积产出率反而较细粒组大,而对于C型坡面粗粒组的体积产出率虽然没有超过细粒组,但相比堆积体积,两组实验的体积产出率差距却变得非常小(图7b)。这说明粗粒组的产出率相比细粒组要好,这或许与粗骨料颗粒之间的碰撞更直接,能量传递效率更高,导致能量损耗速度较慢有关。另外,通过观察实验现象可知,粗颗粒的单个粗骨料体积和质量更大,也更容易滚动,导致堆积体前缘部分颗粒的运动距离和分散程度都很大。
坡面阻挡位置的变化也会影响实验的堆积体积和运动时间(图7),实验5的阻挡位置较高,碎屑颗粒还处于加速阶段的时候就遇上了阻挡装置,导致该组实验的堆积体积相较于实验3(无阻挡)明显减小,同时,由于阻挡的存在,也增加了颗粒的运动时间。实验6的阻挡位置较低,位于斜坡的底部,该组实验的堆积体积和运动时间相较于实验3减小程度有限。因此不同的阻挡位置对颗粒的运动特征影响显著不同,如果对这些阻挡的形状及位置产生的实验差异进行评价分析,可以为滑坡坝的拦挡效果评价及工程设计提供很大帮助。
5.2 堆积厚度演化
将瞬态地形数据与原始坡面地形数据进行差分求解后,同样可以获得厚度分布系列图(图8)。图8不仅能够直观展示实验过程中不同部位的厚度变化数据,还可以展示颗粒运动距离和堆积范围。通过分析,发现颗粒最终的运动距离与坡面形状关联最大,B型坡面的运动距离最大,A型和C型运动距离相近,但A型坡面的堆积厚度却比C型坡面要大。这些运动距离和堆积厚度上表现出的差异与最终堆积体积上表现出的差异是一致的。同时,最终的堆积厚度分布情况差异显著,例如实验3和实验6料仓中的颗粒全部滑出料仓(最终的体积出产率约为1.0),表现为中间大两头小,其他实验组(最终的体积出产率小于1.0)堆积厚度则表现为前小后大。这些在后部堆积厚度上表现出来的巨大差异,与料仓(物源区)的补给情况具有很大关联,当后部的颗粒无法得到物源区的有效补给时,堆积厚度将持续降低,在仓门的附近堆积厚度甚至为零。此外,阻挡位置也对堆积形态产生了重要影响,上部阻挡使得后部堆积厚度变得更大,下部阻挡由于位置靠下,对实验最终的堆积厚度影响有限。另外,随着碎屑颗粒不断向前运移,颗粒堆积厚度也在不断发生变化,斜槽的中前部堆积厚度大致表现为逐渐增加的过程,而后部堆积厚度则经历了先急剧增加而后逐渐减小的过程。关于堆积厚度的时程分析工作,将在以下展开详细讨论。
图8
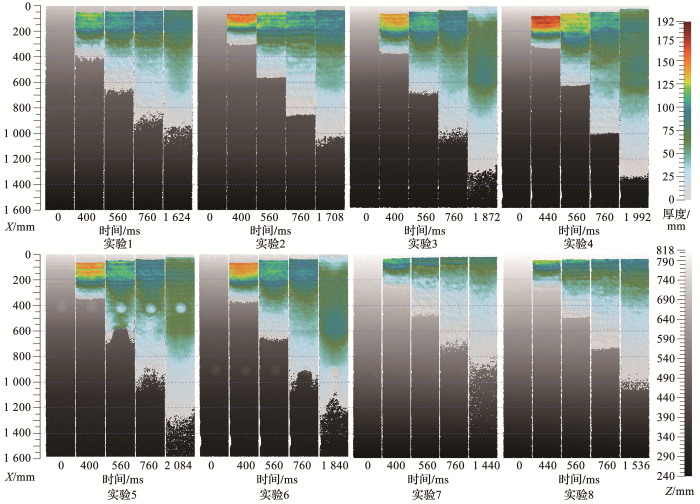
图8
碎屑颗粒厚度演化图
灰色为斜槽底板高度数据,彩色为堆积厚度数据
Fig.8
The evolution of depth for granular mass
Gray data indicate Z-values of bed and colored data indicate the deposit depth
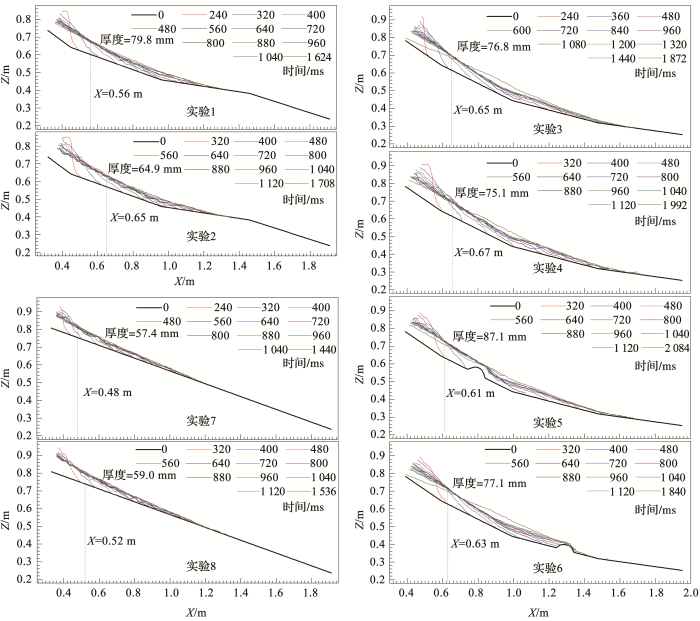
通过分析典型时刻的剖面序列数据(图9),我们可以得出:斜槽的中前部堆积厚度表现为逐渐增加的过程,而后部堆积厚度则经历了先急剧增加而后逐渐减小的过程,且碎屑颗粒运动距离的增长速度经历了开始的迅速增加后也逐渐减速并稳定下来的过程。另外,所有实验组都出现了一个明显的剖面数据交点,该点的厚度数据一旦达到最大值后将不再降低。该点似乎为剖面时间序曲线的共同交点,该点的堆积厚度增大到某值后将不再降低,暂且将其称为“厚度束缚点”。这些点的具体位置如图9所示,且它们的X坐标值与实验条件有很大联系:对于坡面形态,三者大小排序分别为:B型坡面大于A型坡面大于C型坡面;对于粒度大小,二者的排序为:细粒组大于粗粒组;对于阻挡位置高低,二者的排序为:下部阻挡大于上部阻挡。且这些排序与实验的最终堆积体积排序相同,堆积体积越大,“厚度束缚点”的X坐标值也会更大。为什么会有这样的实验现象?“厚度束缚点”的具体位置和堆积厚度为什么是这些数值?或许需要对颗粒的能量转换、能量耗散关系、颗粒之间的相互作用方式及大小等方面进行量化分析才能解开谜底,由于篇幅有限,这里不再开展更深入的实验分析。
图9
5.3 监测点时程数据
图10
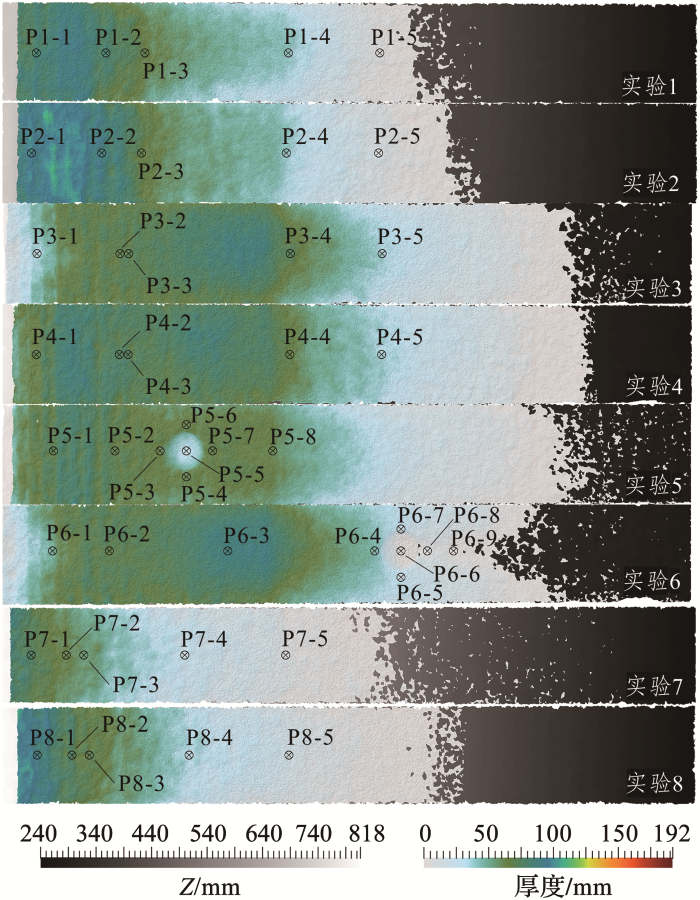
图11
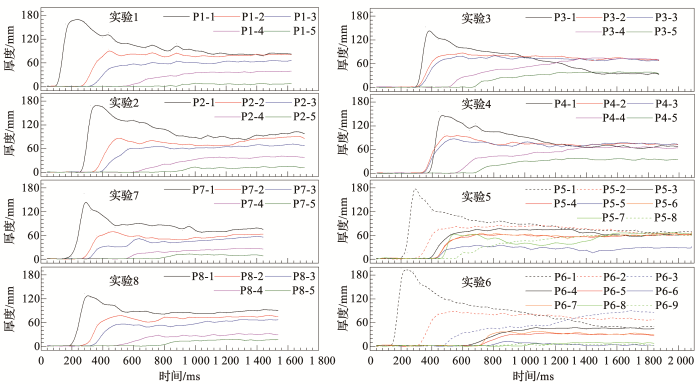
对于实验3和实验6,料仓中的颗粒全部滑出料仓(最终的体积出产率约为1.0),后部特征点(P3-1和P6-1)堆积厚度经历了先急剧增加然后逐渐减小的过程,而“厚度束缚点”(P3-2和P6-2)的堆积厚度逐渐增加到某值后维持不变,中部特征点(P3-4和P6-3)表现为先急剧增加而后保持微小的增长量,前部特征点(P3-5和P6-4)类似于“厚度束缚点”,表现为逐渐增加到某值后维持不变。对于其他实验组(最终的体积出产率小于1.0),某些监测点位置的时程曲线变化规律却又大不相同。例如:实验1(粗粒组)的后部监测点(P1-1)先急剧增加而后逐渐降低,在实验后期堆积厚度保持较为稳定的数值,而其他监测点(包括“厚度束缚点”和中前部特征点)则表现为逐渐增加到某值后维持不变。实验2(细粒组)的后部监测点(P2-1)先急剧增加然后逐渐降低,在实验后期堆积厚度又出现了微小的增长。实验4、实验7和实验8的厚度堆积曲线则和实验1情况相似。
实验5由于阻挡装置位于斜槽上部,当碎屑颗粒高速冲撞阻挡装置时,部分碎屑颗粒越过障碍物,部分颗粒则迅速向阻挡装置两侧(P5-4和P5-6)分流。障碍物前部监测点(P5-7)经历了复杂的变化过程:当碎屑颗粒高速冲撞障碍物时,临空“飞跃”的颗粒造成该点的“堆积厚度”急速增长,大约在540 ms观察到一个瞬态峰值;然后,由于后续颗粒的冲撞效应将会因为前置颗粒的存在而逐渐降低,颗粒由“飞跃”障碍物转为“翻越”障碍物,该点的堆积厚度开始逐渐降低;随着颗粒量的不断增加,当整个障碍物完全淹没在碎屑颗粒中后,该点的堆积厚度又重新恢复到正常水平。而P5-8因为离障碍物较远,临空飞跃的颗粒无法直接到达该区域,因此,该点经历了一个较漫长的增长过程才达到最大值。实验6因障碍物处于斜槽下部,当颗粒碎屑到达障碍物时,其颗粒很难出现“临空飞跃”现象,导致阻挡装置顶部(P6-6)和前方监测点(P6-8和P6-9)的厚度曲线表现为在达到相对较小的数值后保持不变。
6 讨 论
本文利用动态摄影测量技术成功完成了某碎屑流物理模型实验的四维建模工作,并在此基础上获取了实验全过程的动态地形数据。由于实验持续时间只有1.5~2.0 s,而目前的消费级数码相机的慢动作视频采集时间也很短(通常在10.0 s以内),因此,需要实验人员之间的密切配合,才能保证相机能够完整记录实验全过程的影像数据。另外,由于本实验的像控点布置在实验设备侧板上,且实验过程中应保证像控点固定不动,否则会给实验数据带来较大误差,因此,还必须保证实验设备与支座之间的联接牢固可靠。
虽然本实验共设计了8个对比组来讨论颗粒粒度、坡面角度及坡面阻挡等因素对滑坡—碎屑流物理模拟实验运动堆积过程的影响,但影响碎屑流的运动堆积过程的因素还有很多,例如颗粒材料类型、级配、含水率、障碍物的形状及大小等。另外,如不同体积和质量,相同体积不同质量等实验条件差异也会导致不同的实验结果。这一系列问题都值得开展深入研究。同时,本实验未对颗粒的运动速度开展统计分析,由于该问题相对更加复杂,需要专门进行分析讨论。后期的实验可以考虑在碎屑颗粒加入适当的示踪粒子,应用本方法同样可以获取该粒子的运动速度曲线。在此基础上,可以对颗粒间相互作用形式和能量转换关系进行定量研究,这将有助于揭露碎屑颗粒全过程运动规律的神秘面纱。另外,本文主要探索的是物理模型实验的动态地形数据获取方法,没有采集实验过程中的孔压和土压,这些数据的采集在现有技术条件下还没有很好的解决方案,或许只有无线迷你传感器才能解决。
7 结 论
本文介绍了一种基于动态摄影测量的滑坡—碎屑流物理模型实验全过程地形数据获取的技术方法,并在此基础上对提取的堆积体积变化、堆积厚度演化和监测点时程数据等动态地形数据开展详细的分析讨论。理论上该方法可以应用到所有需要获取动态地形地貌数据的物理模型实验中,具有显著的应用价值。具体结论如下:
(1)动态摄影测量技术可以高效准确地获取实验全过程的点云、网格模型和图像模型等三维时间序列数据。且该方法利用消费级数码相机即可完成数据的采集工作,具有广阔的应用前景。
(2)对获取的三维时间序列数据进行后处理后,可以得到实验的变形及运动全过程地形数据。通过对这些数据成果进行详细分析将有助于我们更好地寻找和理解实验的变形及运动规律,并得出更多有益的结论。
(3) 通过碎屑流物理模型实验,可以获取实验全过程的动态地形数据(堆积体积变化、堆积厚度演化和监测点时程等),对这些数据的量化分析可以揭露许多蕴藏在实验过程中的颗粒运动规律。因此,该方法不仅验证了斜槽倾角、颗粒粒径和坡面阻挡位置的等因素都会明显影响碎屑颗粒的运动堆积行为,还显示出强大的数据获取及实验分析能力。
参考文献
Model tests on Earth pressure and settlement of shield tunnel crossing adjacent underground retaining structures
[J].
盾构穿越临近地下挡土结构土压力及沉降影响模型试验
[J].
Mechanism and Method of Key Aquiclude Strata Reconstruction by Backfill Mining Technology
[D].
充填开采再造隔水关键层机理及方法研究
[D].
Reservoir porosity evolution characteristics and evaluation of the jurassic deep reservoir from Dibei in Kuqa depression: Insight from diagenesis modeling experiments under the influence of burial mode
[J].
库车坳陷迪北侏罗系深部储层孔隙演化特征与有利储层评价——埋藏方式制约下的成岩物理模拟实验研究
[J].
Basal contact friction experiment of composite slope containing soft rock and multiple seam in open pit
[J].
露天矿多煤层软岩复合边坡底摩擦实验研究
[J].
Effects of coarse grain size distribution and fine particle content on pore fluid pressure and shear behavior in experimental debris flows
[J].
Particle interaction inside debris flows: Evidence through experimental data and quantitative clast shape analysis
[J].
Centrifugal shaking table tests on dynamic response of bucket foundation-sandy soil
[J].
筒型基础—砂土地基动力响应的离心振动台试验研究
[J].
Depositional mechanisms and morphology of debris flow: Physical modelling
[J].
Research on the failure mechanism of the Heifangtai loess landslides based on the physical simulation experiments
[J].
基于物理模拟实验的黑方台黄土滑坡破坏机理研究
[J].
Effects of debris flow composition on runout, depositional mechanisms, and deposit morphology in laboratory experiments
[J].
Improvement and application of riedel shear systerm
[J].
走滑应变椭圆模型的改进及应用举例
[J].
Analogue modelling of intraplate strike-slip tectonics: A review and new experimental results
[J].
Spreading and deposit characteristics of a rapid dry granular avalanche across 3D Topography: Experimental study
[J].
Study on the Propagation Mechanism of Ground Fissures
[D].
地裂缝扩展机理研究
[D].
Landscape reconstruction and recreation of damaged land in opencast coal mine: A review
[J].
露天煤矿区受损土地景观重塑与再造的研究进展
[J].
Experiments on the Fluidization of Rock Avalanches Under the Effect of Entrapped Air
[D].
高速远程滑坡裹气流态化机理实验研究
[D].
Granular avalanches across irregular three‐dimensional terrain: 2. Experimental tests
[J].
2D dry granular free-surface flow over complex topography with obstacles. Part I: Experimental study using a consumer-grade RGB-D sensor
[J].
Application of unmanned aerial vehicles low-altitude photogrammetry in investigation and evaluation of loess landslide
[J].
无人机低空摄影测量在黄土滑坡调查评估中的应用
[J].
Research on Large Scale Dynamic Photogrammetry
[D].
大尺寸动态摄影测量关键技术研究
[D].
Research of Comprehensive Application of Three-dimensional Image Technology in Geologic Engineering
[D].
三维空间影像技术在地质工程中的综合应用研究
[D].
Time lapse structure-from-motion photogrammetry for continuous geomorphic monitoring
[J].
Research on High Dynamic Range Fringe Projection Three-dimensional Measurement
[D].
高动态范围光栅投影三维测量技术研究
[D].
PIVlab-towards user-friendly, affordable and accurate digital particle image velocimetry in MATLAB
[J].

 甘公网安备62010202000687
甘公网安备62010202000687{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}