
因GPS反射波时刻存在,测量型GPS接收机的天线除直接接收到卫星发射的信号外,还能接收到经天线周围物体一次或多次反射的卫星信号,2种信号产生干涉,引起观测值偏离真值,产生多路径误差[6]。长期以来,多路径误差研究的目的一直是如何消除其影响提高测量精度。近年来,随着研究成果的不断深入,发现从反射波中能够提取出与环境有关的信息,这一技术被称之为GPS-IR(GPS-Interferometric Reflectometry)[7,8,9,10,11,12,13,14,15,16],GPS-IR已成为GPS应用的新亮点。尽管都是利用GPS反射波,GPS-IR与GPS-R有着本质的不同,首先,GPS-IR使用的观测设备是常规的测量型接收机和天线,不需要2幅天线,也无需更改天线的朝向;其次GPS-IR所用的观测值主要是载波信噪比(Signal-to-Noise Ratio, SNR),测量型GPS接收机都具备输出这种观测值的功能。
虽然利用GPS-IR技术监测雪深、水面高度和土壤湿度已经进行了一些初步研究,但对于GPS-IR的技术机理还未阐释清楚,例如:
鉴于现有研究对GPS-IR技术的反射波接收、低高度角信噪比观测值的使用、信噪比残差的形态等机理还未阐释清楚,且几乎是通过实验进行验证,本文将从理论和实验2个方面对其进行分析,为GPS-IR技术应用提供借鉴。
1 常用反射物的导电性能
式中:
反射物的损耗由其损耗角正切表示为[20]:
式中:
表1中是GPS-IR应用领域中有关反射物的相对介电常数和电导率的近似值,反射物的电导率均很小。
| 海水 | 81.0 | 3000.00 | 0.42000 | 0.54000 |
| 淡水 | 81.0 | 0.50 | 0.00007 | 0.00009 |
| 雪 | 1.4~3.0 | 0.01 | 0.00008~0.00004 | 0.00010~0.00005 |
| 土壤 | 3.0~40.0 | 0.10~50.00 | 0.00003~0.19000 | 0.00004~0.24000 |
2 反射波的接收机理
研究经一次反射后GPS信号的极化特性发生了变化,且测量型接收机底部安装有抑径板的情况下,GPS反射波的接收机理。
2.1 反射波的极化特性
(1) 线极化波的反射特性
电磁波的反射、透射与入射的能量关系由反射系数和透射系数确定,当GPS信号从空气入射到非磁性介质表面上时,均匀平面波的垂直极化波和平行极化波的菲涅尔公式为[20]:
式中:
图1

图1
线极化波反射系数的模
Fig.1
The modulus of the reflection coefficients of linear polarized waves
图2

图2
线极化波透射系数的模
Fig.2
The modulus of the transmission coefficients of linear polarized waves
由图1也可知,随着高度角的增大,平行极化波的反射系数先减小再增大,介电常数越大,反射系数的变化幅度越大;反射系数的最小值为0,此时
由公式(7)可知,此时海(淡)水、雪和土壤对应的高度角分别为6.3°,40.2°和30.0°,统称为极化高度角,此时平行极化波发生全透射现象,反射波中只剩垂直极化波;当高度角不等于极化高度角时,平行极化波不会发生全透射现象。由图2可知,随着高度角的增大,平行极化波的透射系数也逐渐增大。
因空气的介电常数小于海(淡)水、雪和土壤的介电常数,由斯耐尔折射定律可知,入射的垂直极化波和平行极化波不会发生全反射现象。
综上所述,GPS信号从空气入射到海(淡)水、雪和土壤表面会同时存在反射和透射现象。当高度角越大或介电常数越小时,GPS入射波中的垂直极化波和平行极化波的能量透射到反射物中就越多。
(2) 圆极化波的反射特性
任何一个圆极化波可以分解成2个相互正交的线极化波之和,垂直极化波和平行极化波即为其中一对正交的线极化波。GPS卫星发射的是右旋圆极化波信号,将其反射后的垂直极化波和平行极化波进行叠加,即可获得右旋圆极化波经一次反射后的反射波特性,其计算公式为[22]:
式中:
图3

图3
圆极化波反射系数的模
Fig.3
The modulus of the reflection coefficients of circular polarized waves
综上所述,GPS反射波中同时存在右旋圆极化波和左旋圆极化波,且高度角越小,右旋圆极化波越多。因此,测量型GPS接收机天线能够接收GPS反射波中的右旋圆极化波。
2.2 接收机抑径板的影响
GPS接收机底部安装有阻止反射波进入接收机的抑径板,理论上,抑径板能够全部抑制接收机底部来的反射波,但实际最多可抑制27%[6],这是因为反射波在抑径板处发生了衍射现象。用惠更斯原理能够定量解释这一现象,当反射波遇到抑径板时,其传播方向发生改变,并能绕过抑径板边缘而继续向前传播。
衍射现象显著与否和抑径板的大小与反射波波长之比有关,若抑径板的宽度远大于波长,衍射现象不明显;若抑径板的宽度与波长差不多,衍射现象就比较明显;若抑径板的宽度小于波长,则衍射现象更加明显。GPS卫星发射的L1和L2载波的波长分别为19.03和24.42 cm,与常用GPS接收机抑径板的宽度相近,且电磁波传播的能量是场分布形式,反射波在抑径板处发生较明显的衍射现象,从而反射波能够被接收机天线接收。
3 反射波的影响机理
研究在不同高度角情况下,GPS反射波对SNR的影响规律。
3.1 直射波和反射波振幅的关系
式中:
图4

设GPS信号经反射物反射后到达接收机,直射波和反射波的振幅分别为[15]:
式中:
接收机天线增益随高度角的变化而变化,所以信号振幅是随时间不断变化的标量。对于测量型GPS接收机天线,为了有效抑制反射波引入的观测误差,通常将接收机天线增益设计成
不同波的振幅关系为:
式中:
由公式(12)和(13)可知,直射波决定着合成波的总体变化趋势,而反射波则表现为局部的波动。设反射波和直射波的振幅比
由公式(12)可知
3.2 信噪比和振幅的关系
式中:SNR为合成波信噪比;SNRd为直射波信噪比;noise为SNR的观测噪声。
将公式(16)代入公式(15),得:
式中:dSNR为信噪比残差,其计算公式为:
由公式(12)可知,直射波信噪比远大于信噪比残差,在GPS接收机输出的SNR中,SNRd决定着SNR的总体变化趋势,即相当于SNR的趋势项,而dSNR则表现为局部的周期性波动,认为其主要是由反射波影响所致。由图2可知,高度角越小,GPS入射波能量透射到反射物中就越少,其反射波的强度就越大,此时dSNR受反射波的影响就越严重。
3.3 基于信噪比残差的反演模型
反射波和直射波间的相位延迟
式中:
来自反射面的反射波角频率为:
若定义
令
式中:
由公式(11),(22)和图2可知,当高度角变化范围较小时,直射波和反射波的振幅变化也较小,余弦曲线的振幅变化也不大,此时dSNR序列呈近似“余弦曲线”形态。
因为接收机天线增益模式设计,卫星从地平线升起到地平线消失,使得SNRd序列呈近似“抛物线”形态,SNR序列就呈近似“抛物线+余弦曲线”形态。可使用二阶多项式拟合得到SNRd,再由公式(17)实现二者的分离,即得信噪比残差。只要获得dSNR及其对应历元的高度角,通过模型解算就可以得到垂直反射距离、初始相位等参数。
4 实验分析
4.1 海面观测实验
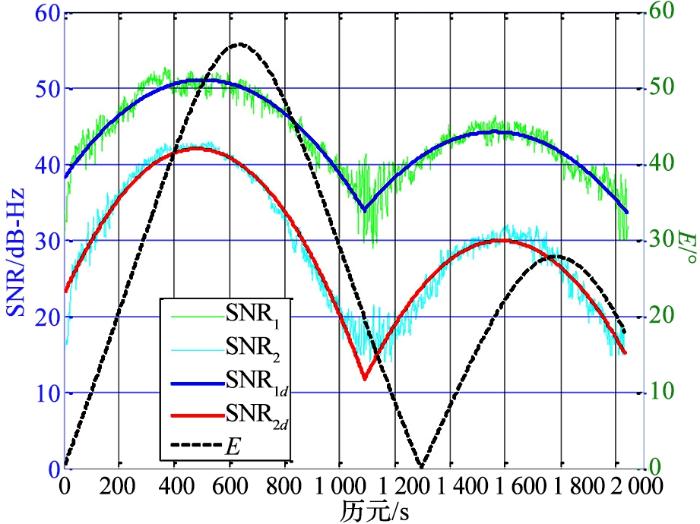
实验使用的GPS数据是美国板块边缘观测计划SC02站于2014年年积日43的PRN26卫星的观测数据,数据采样间隔为15 s,接收机为Trimble NETRS,天线类型为TRM29659.00。其在一天内2个“上升—下降”阶段首尾相接的SNR变化曲线如图5所示。
由图5可知,在一天内,同一颗卫星的L1和L2载波的SNR序列总体变化趋势基本相同,L1载波SNR大于L2载波SNR,但L2载波SNR比L1载波SNR变化幅度大。在高度角较高时,接收机天线增益较大使得SNRd变大、dSNR变小,反之亦然。反射波的强度与高度角密切相关,总体来看,在低高度角时,SNR受反射波影响严重,此时信噪比残差的振幅较大。这些和上述理论分析结果相一致。
图5
4.2 湖面观测实验
4.2.1 实验数据采集
于2011年年积日133在武汉市东湖岸边开展了实验。实验采用Trimble R8接收机,能够接收GPS和GLONASS信号,本文只使用GPS信号。实验观测条件较好,视野开阔无遮挡,可以较好地接收来自湖面的反射信号(图6)。实验观测时长约4 h,采样间隔为1 s。根据气象台发布的信息,实验期间风速为1~3 m/s,湖面波浪起伏比较平缓,约为数厘米。湖面水位在4 h之内可以认为是不变的。
图6

4.2.2 实验数据处理
限于篇幅,只绘制了PRN5卫星在“下降”阶段的变化曲线(图7)。
PRN5卫星L2载波的信噪比残差序列及其拟合结果如图8所示。
因此,GPS-IR只利用低高度角(如30°以下)时的信噪比残差,从信噪比残差变化也进一步说明了接收机能够接收到反射波。
图7
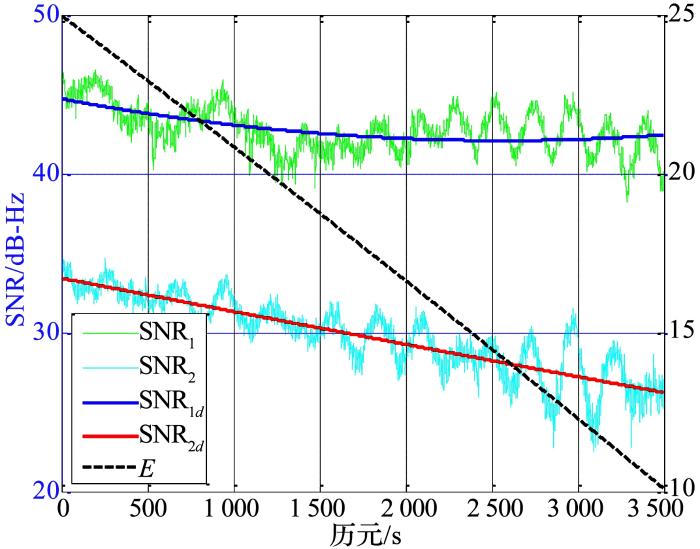
图8

图8
PRN5卫星的L2载波dSNR观测值与拟合值
Fig.8
Observations and estimates of L2 carrier dSNR of PRN5 satellite
5 结 论
基于电磁场与电磁波理论,阐释了GPS卫星发射的信号经反射物一次反射后极化特性发生改变,接收机底部安装有抑径板的情况下,测量型GPS接收机天线仍能接收反射波,且GPS-IR技术应用中只使用低高度角信噪比观测值的原因。根据测量型GPS接收机天线对直射波和反射波设计出不同的增益模式,分析了直射波和反射波在振幅上的区别,根据这一区别以及信号振幅与信噪比的关系,给出了直射波和反射波信噪比的形态,实现了直射波和反射波信噪比的分离,从而建立了基于信噪比残差的反演模型。
参考文献
GNSS Reflected Signal Processing: Fundamentals and Applications
[M].
GNSS反射信号处理基础与实践
[M].
The current status of research on GNSS-R remote sensing technology in China and future development
[J].
我国GNSS-R遥感技术的研究现状与未来发展趋势
[J].
Ground based GNSS-R observations for soil moisture
[J].
GNSS-R测量地表土壤湿度的地基实验
[J].
Advances in GNSS-R studies and key technologies
[J].
GNSS-R研究进展及其关键技术
[J].
Two new algorithms for position estimation of GNSS-R specular reflection point
[J].
两种新的GNSS-R镜面反射点位置估计算法
[J].
GPS Surveying and Data Processing
[M].
GPS测量与数据处理
[M].
Scientific utility of the Signal-to-Noise Ratio (SNR) reported by geodetic GPS receivers
[J].
Using GPS multipath to measure soil moisture fluctuations: Initial results
[J].
Can we measure snow depth with GPS receivers?
[J].
Inferring snow water equivalent for a snow-covered ground reflector using GPS multipath signals
[J].
Forward modeling of GPS multipath for near-surface reflectometry and positioning applications
[J].
Inverse modeling of GPS multipath for snow depth estimation—Part I: Formulation and simulations
[J].
Inverse modeling of GPS multipath for snow depth estimation—Part II: Application and validation
[J].
Comparative experiments on soil moisture monitoring with GPS SNR observations
[J].
利用SNR观测值进行GPS土壤湿度监测
[J].
Measuring water surface height by using reflected signal of geodetic-quality GPS receiver
[J].
利用GPS接收机反射信号测量水面高度
[J].
Analysis of tide variation monitored by GNSS-MR
[J].
GNSS-MR 技术用于潮位变化监测分析
[J].
GPS multipath and its relation to near-surface soil moisture content
[J].
A physical model for GPS multipath caused by land reflections: Toward bare soil moisture retrievals
[J].
Passive microwave remote sensing of snow depth and snow water equivalent: Overview
[J].
基于被动微波遥感的积雪深度和雪水当量反演研究进展
[J].
Electromagnetic Field and Electromagnetic Wave
[M].
电磁场与电磁波
[M].
Li Xuejun,
Detecting and Surveying of Underground Pipelines and Pipeline Information System
[M].
地下管线探测和管网信息系统
[M].
Scattering of GPS signals from the ocean with wind remote sensing application
[J].
Introduction of Telecommunication System
[M].
通信系统概论
[M].
Snow depth estimation using GPS triple-frequency carrier phase combination
[J].

 甘公网安备62010202000687
甘公网安备62010202000687{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}