
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于L1范数正则项约束的不连续资料三维/四维变分融合研究
[王根1, 2  , 盛绍学
, 盛绍学1 , 刘惠兰1 , 吴蓉3 , 杨寅4 ]
, 盛绍学|
|


作者简介:王根(1983-),男,江苏泰州人,工程师,主要从事卫星资料同化、GRAPES数值模拟和多源数据融合研究.E-mail:203wanggen@163.com
经典三维/四维变分融合基于误差服从高斯分布,在极小化迭代时涉及到求解目标泛函梯度,若资料不连续则不可微,从而无法求解相应梯度,故理论要求所融合的资料必须具有“连续性”。采用扩展经典三维/四维变分融合方法,显式地基于L1范数把先验知识作为正则项约束项耦合到经典变分融合模型。在实施过程中把资料映射到小波域,采用新的融合模型在“小波空间”完成资料融合后,再采用小波逆变换映射回“观测空间”。通过线性平流扩散方程作为四维预报模式进行理想试验,试验设计融合背景和观测资料不连续,即在某些点左右导数不相等,试验结果表明文中采用的方法可行。进一步将该方法用于多源降水资料融合试验,采用基于GAMMA拟合函数的概率密度匹配法(Probability Density Function matching method,PDF)进行CMORPH反演降水资料订正,再将订正后的资料与地面站观测资料进行融合。通过与参考场结构相似性度量,得到该方法能更好地保留代表一些天气现象的“离群点”。该融合方法为不连续资料融合,尤其是“跳变点”的变分融合奠定了理论基础并提供了可借鉴的方法。
First author:Wang Gen(1983-),male,Taizhou City, Jiangsu Province, Engineer. Research areas include satellite data assimilation, numerical simulation of GRAPES and multi-source data fusion.E-mail:203wanggen@163.com
Classical 3D/4D variation fusion is based on the theory that error follows Gaussian distribution. When using minimization iteration, the gradient of objective function is involved, and the solution of which requires the continuity of data. This paper adopted the extended classical 3D/4D variation fusion method, and explicitly applied the prior knowledge, which was based on L1-norm, as regularization constraint to the classical variation fusion method. Original data was firstly projected into the wavelet domain during the implementation process, and new fusion model was adopted for data fusion in wavelet space, then inverse wavelet transform was used to project the result to the observation space. Ideal experiment was carried out by using linear advection-diffusion equation as four-dimensional prediction model, which made a hypothesis of the discontinuity with the data between background and observation, and that meant the derivatives between left and right were not equal on some points. The result of the experiment showed that the method adopted here was practicable. A further research was also done for multi-source precipitation fusion. Firstly, CMORPH inversion precipitation data were corrected through PDF (Probability Density Function, PDF) matching method based on GAMMA fitting function. Then corrected data was fused with the observation one. By comparison with the reference field, the result showed that this method can keep some outliers better, which might represent certain weather phenomenon. The L1-norm regularization variation fusion in this paper provided a possible way to deal with discrete data, especially for jump point.
多源融合技术在提高水文— 气象预测能力、气候和海洋系统建模等方面发挥了核心作用[1]。其基本思想是不断融入状态变量(如风、温度和压力等)观测值到物理状态中(如云和降水等微物理过程), 随时间进行迭代通过变分融合系统减少状态变量的不确定性[2]。数据融合方法通常利用观测结果更新当前先验模型状态估计(背景场)进而产生统计意义上的“ 最优” 后验状态(分析场), 并用于预测下一个时间的物理状态[3]。目前已有数值天气预报中心已经或正在建立变分融合系统。虽然各中心在建立时设计方案各有不同, 但原理上融合方案都要最小化一个平方型的评价函数, 即最小平方估计[4]。最小平方估计对远离值非常敏感, 即使仅有几个边远值, 也会使最小平方估计结果完全脱离实际。文中把目前国际上通用融合方法记为“ 经典变分融合” , 常用方法分为两大类:一是群递归滤波方法, 其本质是把随时间演化得到的统计特性融合到系统以追踪最优状态(如基于卡尔曼滤波驱动的数据融合方法)[5~7]; 二是变分法, 如三维/四维变分(3DVar/4DVar), 其本质是依靠模式直接优化每一瞬间所有可用的观测资料[8, 9]。经典变分资料融合通常需要解决“ 光滑” 优化问题, 其解决方案是通过定义一个最小加权欧氏距离, 即观测和背景与真值的差值估计[10], 权重由背景和观测误差协方差矩阵给定。从估计理论出发, 该问题等价于高斯噪声状态下的最大似然(Maximum Likelihood, ML)估计[11]。经典3DVar/4DVar变分融合基于误差服从高斯分布, 在极小化迭代涉及到目标泛函梯度求解, 若资料不连续则不可导, 从而无法求解相应梯度, 故理论要求所融合的资料必须具有“ 连续性” [12]。
但实际上很多资料具有“ 不连续” 性, 从而引入了一个新的问题, 即如何进行“ 不连续” 资料融合?为此, 本文在Ebtehaj等[13]研究的基础上, 显式地把分析状态底层结构信息, 即初始背景场作为正则项耦合到经典变分融合框架中。并在理论分析算法可行的基础上, 开展理想试验和不连续性多源降水资料融合试验。目前国内外关于多源降水资料融合主要分为“ 二源” [14~16]和“ 三源” 融合[17]。“ 二源” 融合研究较多的是融合CMORPH反演降水资料与地面站观测资料, 采用概率密度匹配法(Probability Density Function matching method, PDF)和最优插值(Optimal Interpolation, OI)[14]。因OI的数理理论要求资料具有连续性, 且OI是基于全局二次曲面最优, 易出现过度光滑一些“ 离群” 但正确的值, 从而导致结果易出现负值, 需进行后处理。“ 三源” 融合, 即融合地面— 雷达— 卫星反演资料。其具体思路为先采用PDF方法订正雷达和卫星估测降水的系统误差, 再采用贝叶斯融合方法将三者进行融合[17]。
本文基于Ebtehaj等[13], Tikhonov等[18]和王根等[19]的研究方法得到新的变分融合法, 为“ 不连续” , 如降水、云和大气可降水量(Precipitable Water Vapor, PWV)等一些“ 快变” 量融合奠定基础。该方法显式地包含“ 不连续” 资料底层分析状态的先验知识作为L1范数正则项[13], 通过线性平流扩散方程进行理想试验(同化的背景资料和观测资料不连续, 且具有强的“ 突变点” )。并进一步将该方法用于经过PDF订正后的CMORPH反演降水资料与地面站观测资料融合, 以验证该方法是否能够提高分析状态的稳定性。引入正则化的方法为“ 连续” , 如气温、海洋表面温度( Sea Surface Temperature, SST)[20]等一些“ 慢变” 量融合提供了一定借鉴。
经典3DVar/4DVar变分融合方法的核心为最小二乘估计理论[4]。区别于OI和卡尔曼滤波等方法[6], 变分具有灵活性, 主要体现在2个方面:①可以同时加入不同来源的观测资料; ②可以对目标代价函数加入约束项如正则项, 约束项可由拉格朗日乘子法加入到代价函数进行极小化迭代求得“ 数值解” 或者直接求“ 解析解” 。
假设在初始时间t0未知真实状态是离散空间中每个包含m个元素的列向量x0, x0=[x0, 1, …, x0, m]T∈ Rm, 在时间间隔[t0, …, tk]观测和随机误差分别为yi∈ Rn和vi, i=1, …, k, 其中n< < m。则观测与状态的关系为公式(1)[13]:
yi=H(xi)+vi (1)
式中:H:Rm→ Rn表示非线性观测算子将状态空间映射到观测空间; vi~N(0, Ri)是零均值和方差为Ri的高斯观测误差。变分融合的关键是针对不同观测资料构建不同的观测算子。对于多源降水资料融合, 观测算子H(· )可以假设为线性算子[14]; 而对于卫星辐射资料, 该算子为辐射传输模式[19, 21]。
3DVar/4DVar变分融合归结为在初始时刻极小化以下目标泛函[13, 22]:
J3D, 4D(x0, x1, …, xk)=
xi=M0, i(x0), i=0, …, k (3)
式中:yi为观测值, yi∈ Rn, i=0, …, k;
定义M0, i的雅可比矩阵为M0, i。通过求解演变模型线性化后的切线性模型的伴随模式, 即可得到相应的雅克比矩阵[19]。文中只考虑线性观测算子, 即H(xi)=Hxi, 则4DVar代价函数可以简化为下式:
J4D(x0)=
假设
则4DVar代价函数(4)式可进一步简化为极小化代价函数:
J4D(x0)
=
公式(5)是状态x0的二次光滑函数, 令导数为零, 则可得到分析状态:
结合先验知识进一步约束“ 状态变量” 的变分融合, 得到改进的后验分析估计。根据最大后验(Maximum A Posteriori, MAP)估计和贝叶斯定理, 在4DVar代价函数中加入正则化约束项, 则有[13, 23]:
式中:τ (x0)=
‖ x‖ p=(∑ |xi|p)1/p(p> 0)。
在公式(7)目标代价函数中, J和τ 分别是光滑和非光滑凸函数。在经典3DVar/4DVar变分融合时可以忽略τ 的属性, 但作为额外的先验知识可以用于提高融合结果的准确性。目前国际上用于解决大规模非光滑凸函数的优化问题主要有内点算法(interior point algorithms)[24]和近端加速梯度方法(accelerated proximal gradient methods)[25]等。本文中基于梯度投影算法(Gradient Projection, GP)进行迭代求解[13, 26]。进一步得到:
式中:c> 0, 通过约束Lp范数能得到更稳定的解。基于拉格朗日乘子法公式(8)的约束问题转化为求解无约束问题, 则有[13]:
λ 为拉格朗日乘子, 也称正则化参数, 公式(9)中要求λ 非负[27]。当λ =0时, 公式(9)变成了经典变分融合法。较小的λ 值能够减小先验知识对结果的影响; 较大的λ 值能够引入更多的先验知识。因此λ 起着重要的平衡作用, 能同时保持足够地接近观测和背景状态。通常λ 参数的确定是通过统计交叉验证获得[27]。
从概率角度出发, 公式(9)可以被视为正则化最大后验贝叶斯估计值。正则化约束是指状态量关于先验知识的概率分布[28], 即p(x)∝ exp(-λ ‖ Φ x
前期Wang等[4]把稳健性较强的M— 估计(L2— 估计、Huber— 估计、Cauchy— 估计和Fair— 估计)耦合到经典变分方法中, 本文则把先验知识作为正则项。由于资料可能存在一些正确但可用的“ 离群点” , 为保留这些点, 本文基于前期Wang等[4]的研究基础结合Ebtehaj等[13]提出的方法, 将较稳健的L1范数耦合到4DVar作为目标泛函的正则项。并代替公式(9)中的Lp, 则有:
公式(10)记为“ R4D” 。由L1代价函数性质决定其较适合融合一些“ 快变” 的变量如降水等。L1范数正则化4DVar目标泛函进一步定义为:
式中:c> 0, 此为求解带约束项的范数极小化问题。如果Φ 作为一阶偏导算子, 使用L2范数正则化(λ ‖ Φ x0
4.1.1 4DVar预报模式— 线性平流扩散方程
平流扩散方程是一个抛物线偏微分方程, 其本质上是无散度和忽略压力梯度的Navier-Stocks方程, 定义为:
式中:a(s, t)表示速度, θ ≥ 0表示黏性常数。简化的线性形式(a为常数)和非黏性(θ =0)方程常被用于资料同化和数据融合新算法的数值模拟中[29]。本文只考虑其线性形式。基于线性平流扩散和叠加原理, 公式(12)在时间t的解是通过卷积高斯核得到, 即:
式中:标准偏差为
文中离散平流扩散模型可以表示为扩散系数(D0, i)和初始空间的线性变化幅度(A0, i)的积, D0, i为托普利兹矩阵[30]。该试验预报方程为xi=M0, ix0, 可进一步表示为:
4.1.2 变分融合观测算子介绍
H=
4.2.1 观测和背景误差协方差介绍
观测和背景误差是资料变分融合重要组成部分, 其决定了系统极小化迭代时的稳定性、解的收敛性和分析场状态质量。对于文中观测误差R, 只考虑固定白噪声的高斯分布, 即R=
背景误差表示状态变量之间的相关性, 在资料变分融合时, 作为背景状态对目标泛函的权值。一阶自回归(Auto-Regressive, AR(1))高斯马尔可夫过程具有空间相关性的数学模型。本试验将AR作为背景误差; 并在Gaspari等[31]研究的基础上构建误差协方差模型。定义AR(1)的指数协方差函数为ρ (ϑ )∝ e-α |ϑ |。其中ϑ 表示时间或空间的滞后, 参数α 决定变量间相关性的衰变率, 1/α 通常被称为特征相关长度。该协方差只是函数滞后的大小相关。因离散背景误差协方差是一个埃尔米特矩阵, 可以分解为一个标量标准差和相关矩阵的乘积[32], 即B=
本试验中令σ b=0.20, σ r=0.16,
Cb=
4.2.2 背景和观测值介绍
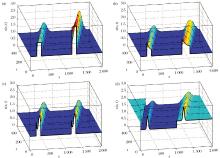
为验证本文使用的L1范数正则化的可行性, 共设计了4组对比试验。“ 真实” 状态(即“ 真值” )分别为分段函数(Piecewise Function, PF)、二次函数(Quadratic Function, QF)、正弦函数(Sine Function, SF)和平方指数函数(Square Exponential Function, SEF)。所有初始状态都假定在R2048空间, L=2 048; 平流扩散随时间演化的粘度系数θ =4[L/T]; 速度a=1[L/T]。假定变分融合时间间隔介于0至T=500[T]之间, 在此区间内每100[T]步进行观测采样(图1)。
从图1可以看出, 在构建的“ 真实状态” 中有较多点的左右导数不相等, 即在某点x0有f'(
因变分融合分析必须包括背景场和实际观测值[4], 且考虑到资料的“ 不连续性” , 文中构建“ 真实状态” 的4种函数设为
式中:
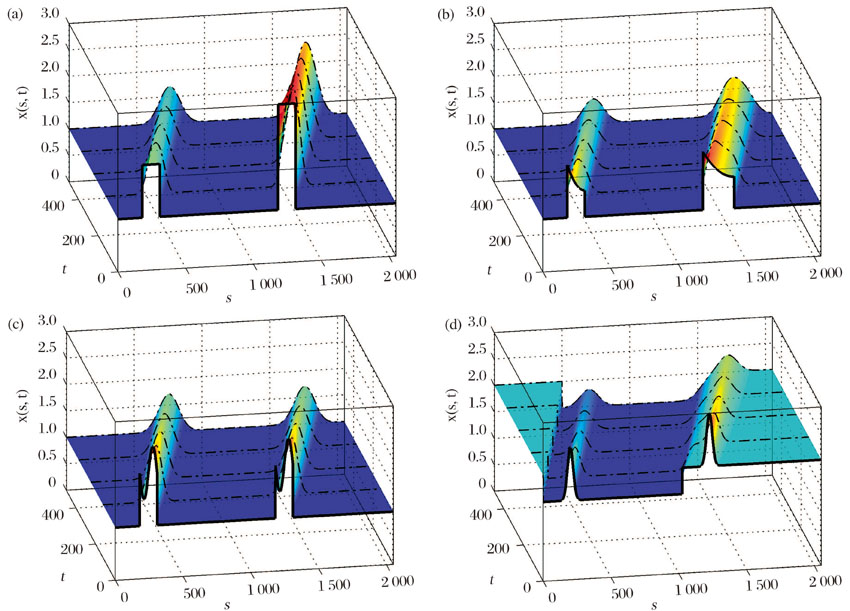 | 图1 构建“ 真实状态” (a)分段函数(记为PF); (b)二次函数(记为QF); (c)正弦函数(记为SF); (d)平方指数函数(记为SEF)Fig.1 Building true state (a) Piecewise Function (PF); (b) Quadratic Function (QF); (c) Sine Function (SF); (d) Square Exponential Function (SEF) |
采用观测算子H(· )和平流扩散方程M(· )对“ 真实状态” 计算得到“ 真实观测值” , 并在此基础上加入随机扰动后得到的值作为实际观测值, 即:
y=H(M(
式中:y为扰动后的观测值, 即为实际观测值
利用4DVar和R4D-Var 2种方法试验4组独立个例变分融合效果, 结果见图2。其中4DVar和R4D-Var分别为经典变分融合法和经典变分融合耦合L1范数正则项得到的融合结果。
从图2可以看出耦合L1范数正则项(R4D-Var)的融合效果明显优于经典变分(4DVar)融合方法, 尤其对于一些不连续点的融合。分析其原因:①在正则项中分析误差被“ 适当” 地抑制和过滤, 初始状态特征被“ 较好” 地保留; ②经典4DVar一般“ 吻合” 和遵循背景状态而不是提取真实状态; ③经典4DVar在处理白噪声的误差协方差时具有较弱的过滤效果, 存在的冗余信息导致过度拟合; ④经典4DVar基于二次泛函易造成一些“ 拐点” 平滑(拐点即为左右导数不相等的点)[4, 13]。
需要说明的是, 该试验中采用新的融合模型在“ 小波空间” 完成资料融合后, 再采用小波逆变换映射回“ 观测空间” [33]。
为验证R4D-Var的融合效果, 本文进一步对100个独立个例开展4组试验, 并采用相对均方误差(Mean Squared Error, MSEr)、相对绝对误差均值(Relative Mean Absolute Error, MAEr)和相对偏差(BIASr)3种方法进行度量, 结果见表1。3种度量方法分别定义如下[13]:
MSEr=‖
MAEr=‖
BIASr=‖
式中:
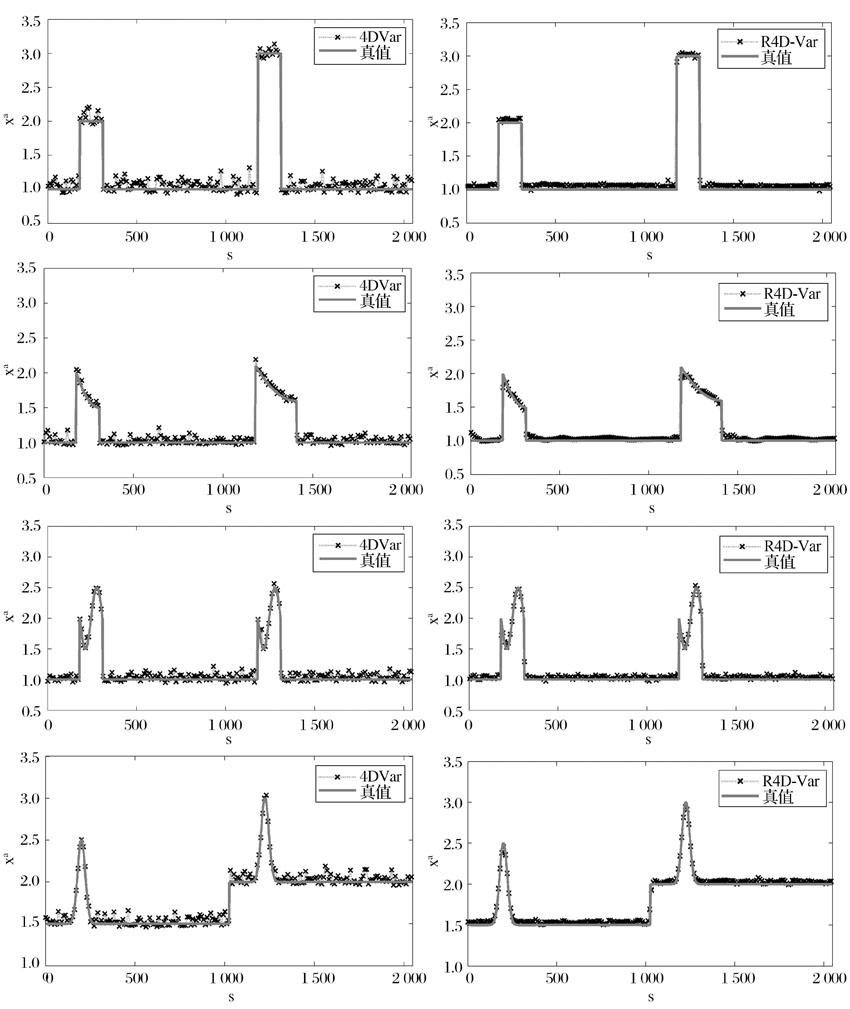 | 图2 经典变分融合和耦合L1范数正则化的融合效果对比分析Fig.2 Fusion effect analysis of classic variational fusion and coupling L1 norm regularization method |
| 表1 经典变分和耦合L1范数正则化融合的MSEr, MAEr和BIASr对比分析 Table 1 Comparative analysis fusion result of classical variational and coupling L1 norm regularization based on the method of MSEr, MAEr and BIASr |
从表1基于一些传统“ 保真度” 度量指标可以看出本文使用的R4D-Var方法整体优于经典4DVar。综合图2和表1结果可以看出, R4D-Var可行, 为不连续资料融合奠定了一定的理论基础。
由于降水资料具有“ 不连续” 和“ 非高斯” 性, 本文只开展降水资料“ 不连续” 的变分融合研究。
本文“ 不连续” 降水试验数据时间段为2011年5月1日至9月30日的CMORPH和安徽省81个国家站观测的小时降水数据。CMORPH反演降水资料从网站直接下载(网站:ftp:∥ftp.cpc.ncep.noaa.gov/precip /global _CMORPH /30min_8 km), 并累加成逐时降水后使用8 km经纬度网格降水场。因该降水资料具有明显系统偏差, 在资料融合前通过GAMMA函数[34]拟合的概率密度匹配PDF方法进行系统偏差订正。
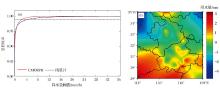
图3a为砀山站CMORPH和雨量计匹配图; 横坐标表示降水量阈值(单位:mm/h)。图3b为81个站累积概率(Cumulative Probability )在0.99时的偏差(单位:mm)。偏差定义为雨量计减去CMORPH值。以图3a砀山站为例。给出订正过程:第一步, 给定累积概率值如0.99(图中灰色线), 找到红线CMORPH相应累积概率值0.99对应的降水量2.65 mm/h; 第二步, 由0.99找到蓝线对应的CMORPH值降水量值4.85 mm。此时订正量为2.2 mm。由图3b可知, 安徽南部地区CMORPH值偏小, 尤其黄山(30.144° N, 118.16° E)地区。安徽北部CMORPH值偏大, 安徽中部相当。分析其原因与CMORPH得到面降水量有关, 也可能与安徽每年发生的台风雨和梅雨等降水有关。从气候诊断出发, 安徽南部偏湿易发生洪涝, 安徽北部偏干易发生干旱, 安徽中部处的方差变化较小。说明CMORPH资料具有较好的适用性。
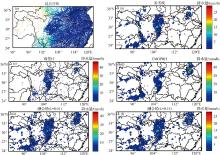
进一步对比分析经典3DVar和R3D-Var融合方法的效果(图4)。此时R3D-Var为当M=I时的R4D-Var。图4给出了区域融合站点分布(不同颜色代表站点海拔高度, 颜色超暖则海拔越高)、雨量计观测值(单位:mm/h)分布、CMORPH反演降水值(单位:mm/h)和R3D-Var不同正则化参数(λ )得到的融合场(单位:mm/h)结果。需要说明的是, 此处参考场为中国气象局国家气象信息中心融合产品, 其为CMORPH和地面雨量计观测资料二源融合产品[14]。地面观测降水资料由国家气象信息中心数据室提供。在操作过程中把分辨率0.1° × 0.1° 的参考场插值到CMORPH和融合场的分辨率, 即0.0625° × 0.0625° 。
从图4可以看出, 雨量计观测给出了单个站的降水分布情况, 无法把握降水的空间分布结构; CMORPH降水资料由红外卫星资料等反演得到, 能够把握降水场的空间结构。CMORPH反演降水和地面雨量计观测值的降水值量级相当, 与R3D-Var融合结果有较好的一致性。并与参考场的形态接近。参考场量级偏小, 其原因与所使用的融合方法(最优插值, OI)有关。区别于参考场更“ 信赖” 地面观测, 从图4e和f看出R3D-Var则较多依赖于背景场CMORPH资料, 且随着正则参数λ 变大与参考场量级更接近, 并且逐步把背景场信息融入到融合场, 能够把握住背景场的结构分布特征。
本文仅对新算法的应用进行研究, 为揭示背景场信息如何作为正则项引入到融合场, 从降水场结构出发, 采用结构相似性(Structural SIMilarity, SSIM)进行度量[35]。SSIM为局部尺度度量法。对于需要比较的2个数据集U和V的SSIM定义为:
SSIM(u, v)=
式中:c1和c2为常数, 用于稳定计算; u和v分别为数据集U和V的部分数据集;
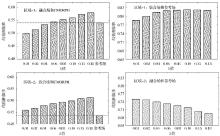
选取28° ~34° N, 104° ~107° E和32° ~38° N, 116° ~119° E 2个区域分析正则化参数λ 值的变化对结果的影响(图5), 即图4中的红色框区域。图5分别给出了λ 值为0.01, 0.02, 0.04, 0.06, 0.08, 0.1, 0.15和0.18的融合结果。图5中标记“ 融合场和CMORPH” 和“ 融合场和参考场” 为R3D-Var得到的融合场分别与CMORPH和参考场的结构相似性, 横坐标中“ 参考场” 表示参考场与CMORPH的结构相似性SSIM(虚线), 该值为比较的“ 准则” 。
从图5中可以看出, 区域1参考场与CMORPH反演降水资料的结构相似性SSIM为0.540。随着正则化参数λ 值增大, 结果与CMORPH和参考场的SSIM值也越来越大, 超过了0.8, 说明文中使用的方法与参考场具有较好的相似性。区域2参考场与CMORPH反演降水资料的结构相似性SSIM为0.436。随着正则化参数变大, 融合场与CMORPH的SSIM越来越大, 说明了正则项能够通过λ 的变化逐渐把背景场信息引入到融合模型中。随着λ 变大, 与参考场的SSIM逐渐变小。结合图4分析可知, 区域2融合降水场具有较好的连续性, 有一条明显“ 雨带” , 而参考场雨带呈现了断裂, 说明文中的方法能够把降水场的结构信息融入到模型中。
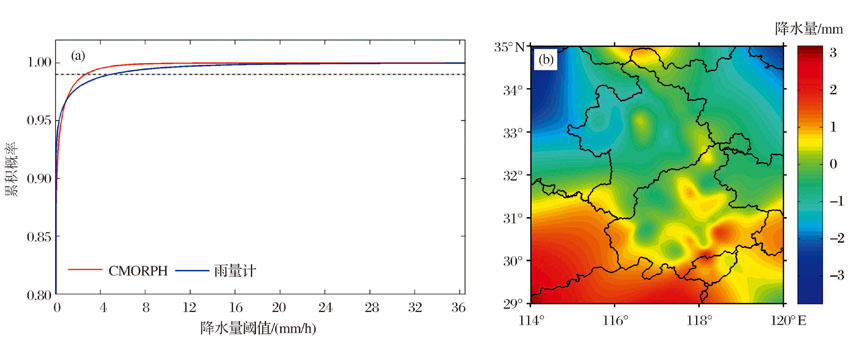 | 图3 代表站累积概率匹配图和安徽国家站偏差分布图 (a)CMORPH和雨量计累积概率匹配; (b)CMORPH降水资料对应的国家站偏差值Fig.3 Cumulative probability matching of representative station and bias distribution of national station in Anhui Province (a) Cumulative probability matching of CMORPH and rain gauge; (b) Bias value of CMORPH of corresponding station |
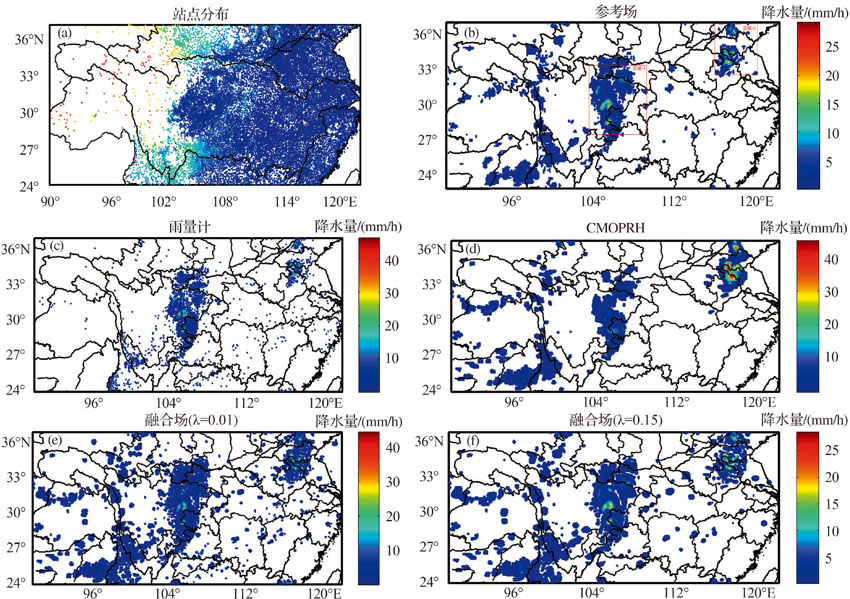 | 图4 不同正则化参数的融合降水场与参考场的降水分布结构对比Fig.4 Comparison structure of precipitation fusion based on different regularization parameter and reference field |
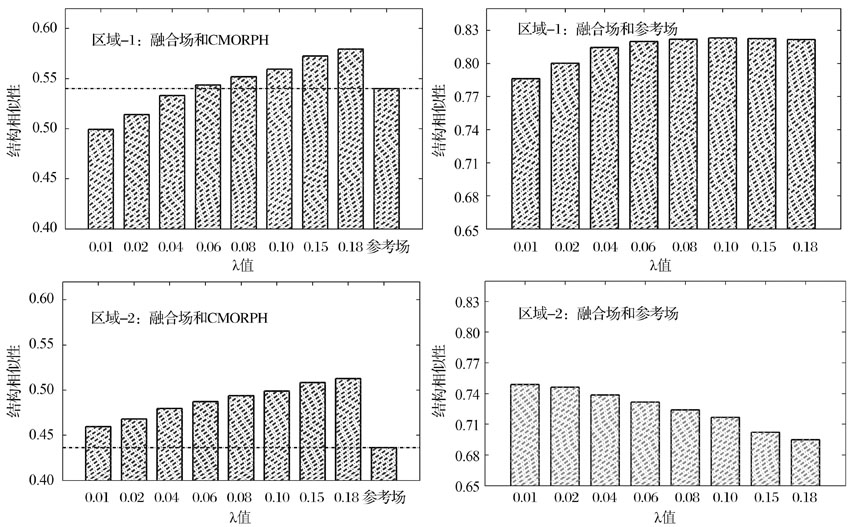 | 图5 参数不同值融合场与参考场和CMORPH的结构相似性SSIM对比分析Fig.5 Comparative analysis of SSIM between fusion field based on different value of parameters and reference field and CMORPH |
经典3DVar/4DVar变分融合要求目标代价泛函为凸函数且可微光滑。当资料具有“ 不连续性” 时, 代价函数非光滑。此时经典变分融合基于梯度进行极小化迭代的方法不再适用。文中针对不连续资料进行了变分融合算法的应用研究, 主要结论如下:
(1) 文中将背景资料特点(如不连续性)作为L1范数正则项耦合到3DVar/4DVar模型中。通过线性平流扩散方程作为预报模式, 平滑滤波和采样作为观测算子, 构建4个存在“ 拐点” 的试验, 得到文中使用的方法对这些点的融合具有较好的“ 保真性” 。经典4DVar在这些点处出现了“ Gibbs现象” 或者过度平滑了这些点的信息。由此试验得到此方法在融合一些存在天气现象的“ 离群点” 具有较好的效果。
(2) 在理论分析基础上开展了4组独立试验, 并采用相对均方误差、相对绝对误差均值和相对偏差进行度量, 得到文中使用的方法整体优于经典4DVar。
(3) 在多源降水资料融合时, 基于GAMMA拟合函数PDF法进行CMORPH反演降水资料订正。对比分析得到CMORPH反演降水资料整体比台站观测偏小。
(4) 将经典变分融合耦合L1范数正则项方法用于CMORPH反演降水和台站观测降水融合中。通过结构相似性SSIM度量不同正则化参数λ 值融合结果与参考场、背景场CMORPH的结构相似性, 得到该方法能较好地把背景场中的降水分布结构信息引入到模型, 并表现在融合场中。其融合结果与被融合资料数值量级相当, 而参考场量级偏小。
文中正则项的引入能够逐步引入背景场信息, 能够把握住水汽场的结构, 不仅为一些不连续“ 快变” 量融合, 也为一些连续“ 慢变” 量融合, 如气温、海洋表面温度等融合的研究奠定了理论基础。针对降水资料的非高斯和不连续性融合难题, 尤其是0值的处理, 小波域稀疏性正则化变分融合有望能够解此难点[36]。经典变分融合一般调用有限内存L-BFGS(Limited-Memory BFGS)极小化算法进行求解。而当目标泛函非光滑时, 文中提到的用于解决大规模非光滑凸函数优化问题的内点算法、近端加速梯度方法和梯度投影等算法具有较好的应用前景。因本文仅对算法的应用进行研究, 且开展的个例研究较少, 代表性不够。另正则化参数也是结合经验给定。后期将开展自适应正则化参数和文中算法大量实际个例研究, 将成果业务化到降水监测、预报和预警中, 以期更好地开展公共气象服务。
致 谢:在此衷心感谢Ebtehaj A M博士给予的理论解释和指导, 及评审专家在百忙之中为本文提出的宝贵意见。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|