

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
城市区域(超)低空空域无人机活动通道划设规则与方法
[白龙1  , 路紫
, 路紫2*, * , 杜欣儒1 , 郜方1 ]
, 路紫, 杜欣儒|
|


作者简介:白龙(1991-),男,河北石家庄人,硕士研究生,主要从事区域开发研究.E-mail:bailong051234@163.com
(超)低空空域已成为空域资源充分开发利用的重要组成部分并得到各国广泛关注,无人机活动是其重要形式并显现出巨大的社会经济前景。首先分析了(超)低空空域资源开发利用的时代背景和城市区域(超)低空空域无人机活动面临的挑战,并综述了国内外无人机活动的法律体系保障和通道划设研究进展;其次归纳总结了城市区域(超)低空空域无人机活动高度—密度规则、覆盖区规则和隔离区规则的存在形式及其优化方案;最后在构建无人机(群)空中网络的基础上,针对不同无人机活动类型对空中通道的需求,展望了从3D城市模型基础方法到最优函数地图方法的演进。研究认为:无人机活动通道划设中既包括高度—密度一般规则,也包括覆盖区、隔离区特殊规则,在3D城市模型基础上应用最优函数地图方法有助于最优活动通道的选择;依据城市区域地面建筑与居民实际情况确立的通道划设规则与方法对于(超)低空空域资源开发以及协调空地矛盾,乃至国家空域系统的实施都具有重要作用。
First author:Bai Long (1991-), male, Shijiazhuang City, Hebei Province, Master student. Research areas include regional development.E-mail:bailong051234@163.com
The exploitation of (ultra) low airspace resource has become an important component of optimizing the utilization of airspace and has received worldwide attention. It is the major form for UAV activity, which reveals great socioeconomic prospects. Firstly, the background of exploiting (ultra) low airspace resource and challenge for UAV activities were analyzed in regional areas. Then, legal rights for UAV activities and routes design in overseas and domestic research were reviewed. Second, the forms of regional rules for UAV activities in (ultra) low airspace were summarized, which included height-density rule, coverage area rule and isolation area of rule. Third, based on the air network of UAV(s) and aiming at the demand of aerial lanes for different requirements, the development from the method of 3D city model to the Cost-to-go was prospected. The findings are as follows: UAV activities’ aerial lanes design includes high-density as general rules and coverage area rule, isolation area rule as special rules. On the basis of 3D city model, improved method of Cost-to-go is applied to the choice of the optimal aerial lanes; based on ground buildings and residents’ actual conditions in regional area, the rules and methods are good for the (ultra) low airspace resources development and better solve the problem of UAV activities coordination. Furthermore, the rules and methods play an important role even in the implementation of the national airspace system.
空域是一定的空气空间[1], 在空域立面上因飞行器飞行高度不同存在自然属性和社会属性的差异, 空域划分给定了不同飞行器适合飞行的空间。军/民航占据了高空、超高空空域位置, 其空域资源开发利用已较为充分。1 000 m以下低空空域和100 m以下超低空空域的开发利用是伴随着空域开放与管理改革而逐步推进的。在国外, 现代航空理论和实践的变革基本是在新一代航空运输体系(Next Generation Air Transportation System, NextGen)基础上以实现陆空交互为目标而引发的[2], 灵活空域使用(Flexible Use of Airspace, FUA)的构想进一步强调了以动态组织为基本手段实施空域— 地域行为管理, 其在提高准确性和效率方面展现出一定优势[3], 在这个过程中越来越关注低空空域资源开发利用的跨领域合作。此外, 近年来通用航空产业的发展使新的低空空域利用形式不断涌现, 进一步呈现出低空空域资源开发利用的进步。2015年7月美国联邦航空航天局(Federal Aviation Administration, FAA)和通用航空组织召开峰会, 旨在创新低空空域空中交通解决方案。FAA作为空域监管权力部门, 其“ 管辖权已涉及所有领空— — 从草丛顶部叶片到无限高” , 它一方面保持对国家空域系统关键部分的领导, 另一方面鼓励通用航空的创新和发展, 不断促发低空商业市场以服务消费者[4]。我国2014年即颁布《低空空域使用管理规定(试行)》, 将低空空域定义为真高1 000 m(含)以下, 并按照低空空域开放、动态管理、灵活使用思想促进低空航线建设、运营维护体系建设和信息保障体系建设, 以强化(超)低空空域资源的开发利用。我国“ 十三五” 规划及其100个重大工程项目中提出天地一体化战略, 其具有典型的全覆盖天地/海陆空协作属性, 同时在新空间发展概念中也包括了“ 民航、通航” 基础设施网络, 未来有望实现天地多维空间互操作[5], 实现低空空域不同时间段内的合理空域配置, 并实现各层次空域资源可持续利用和协调, 这给国家空域系统变革过程中(超)低空空域资源的开发利用带来了新机遇。
从地球科学视角看, (超)低空空域与地域间边界模糊关系复杂, 处于空域资源至地域资源的过度层, 空域开发与地域人类经济开发犬牙交错, 国际民航组织(International Civil Aviation Organization, ICAO)所提出的低空空域资源的引致经济价值和催化经济价值均是以此为基础的[6]。相对高空而言, (超)低空空域飞行受地表波动和气流影响以外, 受城市区域地面建筑物影响更为显著, 资源利用风险系数更高、矛盾更明显。
无人机活动作为(超)低空空域利用的主要形式之一, 在使城市区域(超)低空空域资源价值属性进一步体现[7], 并导致低空空域缓冲区最终消亡的同时, 还面临许多不确定社会因素的挑战。美国联邦在对城市区域控制中就界定地表闲置区域和地平高度152.4 m以上空域是任意使用的, 但是美国最高法院建议在裸眼可见范围内不构成对隐私权的侵犯, 不需要保持在152.4 m空域以上, 可见其(超)低空空域所有权正向公共权利延伸。然而实际使用中, 可飞行区域与严格限制侵入的私人领地之间是难以清晰划分的, FAA的规则中并没有明确指出在什么情景下使用无人机将构成侵权。且这个高度还需协调高层建筑与飞行的关系, 这与机场附近的高层建筑须获得航空监管部门许可不同, 在机场区域飞机运行具有法律优先权。可见, 高度与区域限制等仍是无人机活动面临的重大挑战。
近年来特别是2014年美国国家运输安全委员会做出无人机是飞机的裁决, 以及美国国会宣布商业无人机业务构成部分国家空域系统后, 大量无人机操作员在FAA注册商业运行, 接受FAA和美国航空法的保护。FAA在颁布无人机设备使用规则的同时, 指出要通过引进新的无人机活动规则以管辖空域中一切移动的对象, 要充分评估无人机低空飞行带来的脉冲噪音、轨迹云等问题[8], 到2015年美国已有20多个州批准了无人机法律, 代表性城市有芝加哥、洛杉矶、迈阿密和圣克拉拉等。
我国无人机在不断改进过程中完成了各重要领域的复杂任务, 无人机权益也备受关注。《通用航空飞行管制条例》明确规定无人机用于民用业务飞行时, 须当作通用航空飞机对待, 即依据《中国民用航空空中交通管理规则》在执行飞行时向空中交通服务部门办理申请手续和飞行计划, 无人机飞行高度和区域进入等方面均需依据《轻小型民用无人机系统运行管理暂行规定》。但到目前为止, 关于(超)低空空域资源使用的相关法规仍较欠缺, 如(超)低空无人机活动的空中通道划设规则等都有待进一步界定。
国内外关于无人机活动通道的研究是以无人机航路为对象展开的。无人机往往飞行于城市区域(超)低空域, 因此穿越不规则障碍空间的航路设计就成为无人机活动的重要问题。其航路设计基本是以实现建筑物跟随、建筑物回避为目的, 以为无人机提供最优飞行航路为目标的研究与规划。国内外学者已经做了大量关于(超)低空空域无人机航路设计的研究。Karaboga[9]为了解决函数值的优化问题提出了群体智能算法, 通过群体中个体间的交流、转换和协作实现最优航路选择; Clothier等[10]设计了Barrier-bow-tie模型, 旨在通过实时优化空中航路实现动态规避碰撞事故; 张启瑞等[11]在全局航路设计中提出面向密集建筑物空间的局部回溯航路设计方法, 还通过添加相应约束条件来描述密集建筑物空间航路设计问题, 实现了对不规则障碍空间中“ 航路死区” 的突破。可见, 无人机活动的航路技术已较好地为其建筑物“ 威胁规避” 提供了支撑。同时, 关于无人机自动化导航系统及其飞行控制研究进展明显, 为无人机活动通道设计提供了技术支持[12]。相对而言, 至今仍较少关注城市区域无人机活动的通道划设规则及其方法。开展空域科学和城市科学相结合的无人机活动通道划设的研究十分必要。
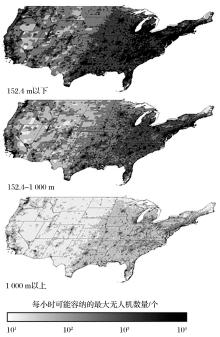
作为联邦监管机构的FAA于2012年在现代化改革法案中曾提出无人机活动通道划设问题。其出发点是, 高层建筑和高架运输线对(超)低空空域资源的争夺对航空监管提出了新的要求, 需要对城市区域空中通道实行灵活控制与管理, 以协调城市高空项目选址和飞行需求的关系。这意味着地方(城市)可以公用权的方式或其他公共方式行使空域管理权, 也意味着监管部门可对城市特定区域限定无人机活动。如果建筑物依法依规建设并符合建筑标准, 就可按照(超)低空空域管制要求规范无人机飞行。如美国菲尼克斯(Phoenix)限定了高层建筑的最大高度, 基此将特定区域的高层建筑(包括建筑物尖顶、雕像、时钟塔楼、公共纪念碑、广告牌和信号发射塔)置于空域管制中, 通过国家监管机构与城市协商确定这些区域的(超)低空空域管制高度, 进而在市区内开辟无人机空中通道。鉴于不同类型地区不同海拔高度具体情境的差异又引申出无人机密度的研究, 如Dalamagkidis等[13]在考虑人口密度和建筑物等因素后, 基于空中飞行器碰撞风险估算对不同高度(152.4 m以下, 152.4~1 000 m, 1 000 m以上)每小时容纳的无人机最大密度进行了划定(图1), 并将1 000 m高度作为无人机商业活动的分界点。以上高度— 密度规则构成了无人机活动通道划设的一般规则。
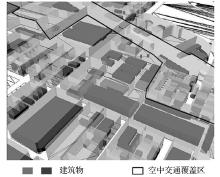
为适应城市区域(超)低空空域无人机活动通道系统的建设, 美国还尝试采用“ 可用和可降” 概念构建区域规则, 在此我们将其称为空中交通覆盖区规则, 它经垂直延伸建立了层状空域, 并在不同层状空域划设无人机活动通道, 以便清晰给出无人机活动中的可降落区域以及与固定物体间的潜在冲突区域。空中交通覆盖区应是一种批准使用的特殊区域, 其设施须纳入许可使用范围, 需得到地面资产所有者的同意并能规避风险(针对公共安全和隐私场所、具有文化价值的购物中心、学校和教会场所等)。可见空中交通覆盖区是一种促进商业无人机在没有当地监管部门构建特定的无人机飞行航线情况下的适用规则, 通过可降落区域的框定以有效缓解无人机的噪音、光反射和隐私权侵犯。城市区域空中交通覆盖区的划设特别关心空域使用问题。如沃斯堡(Fort Worth)是一座拥有长期规划历史的城市, 其规划既关注城市平面设计也关注立体视觉, 已经形成三维城市建设与发展模式, 无人机空中交通覆盖区规划必须针对建筑物高度和空域使用的实际情况进行适当规避(图2)[14]。
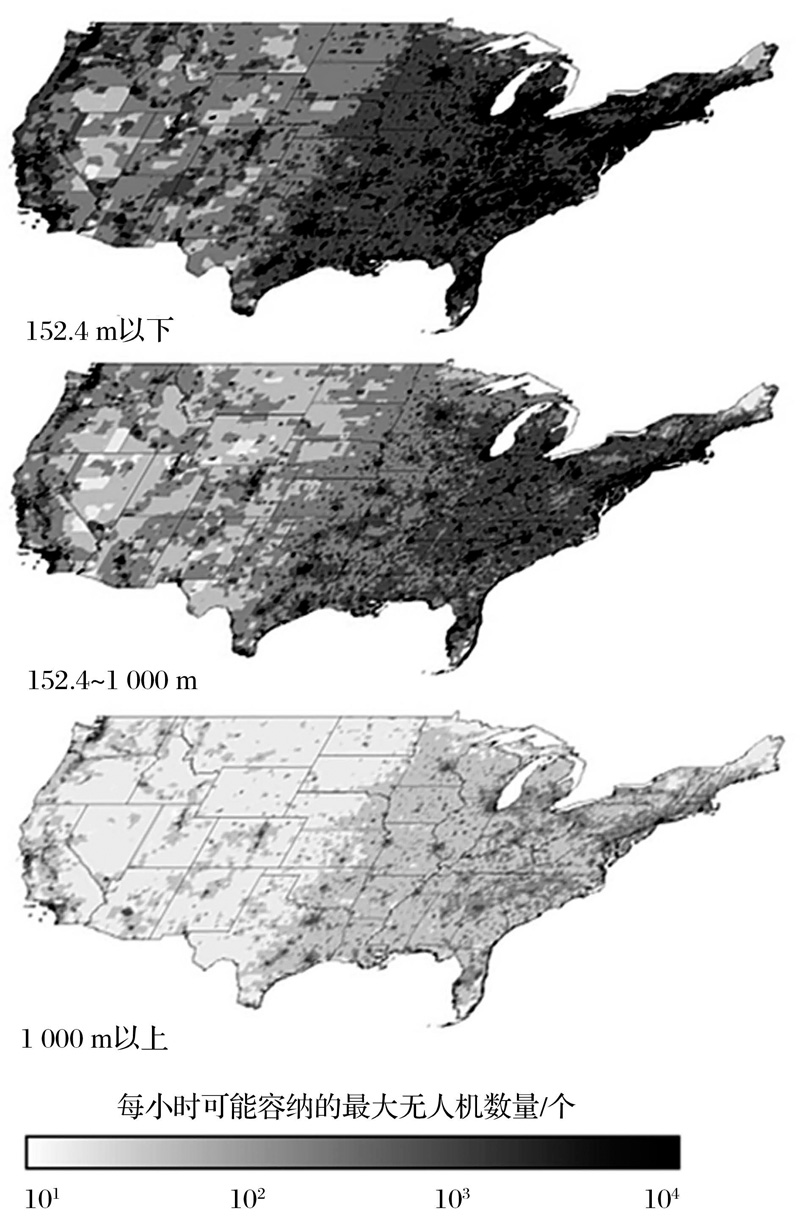 | 图1 美国不同高度层可能存在的无人机最大密度示意图(据参考文献[13]修改)Fig.1 Diagram of possibility of maximize UAV in different levels in UAS (modified after reference [13]) |
在无人机活动管理中, FAA和地方政府间实行的严格权力划分基本是围绕空中交通隔离区划设而形成的, 其经过历史演变和经验总结已成为(超)低空空域管理的重要模式。长期以来FAA和地方政府一同在联邦法规框架下构建禁飞区以限制无人机使用。FAA空中交通隔离区的划设更多是从全局出发并兼顾环境保护区、民航机场、市中心上空的空域使用等。FAA强调:在高度城市化地区如果市政当局缺乏对空中通道的实际控制, 将会面临城市区域超高层项目与无人机飞行项目的双重损失。而地方政府空中交通隔离区的划设, 更多是出于交通和公共安全等目的, 从具体城市区域自身发展的必要性和实际情况出发[6], 重点在“ 有关航空安全以及涉及公众健康和公众普遍利益的” 空域部署无人机, 如禁止在人口稠密地区使用无人机飞行, 在城市限定地点随意起飞或着陆, 占用或飞越建筑物密度很大的低空, 忽略噪音和地面照明眩光等视觉负面影响的夜间飞行, 未经许可在繁忙交通峰值期间飞行, 未经许可通过商业楼宇走廊(穿越高楼“ 峡谷” )飞行等。可见两者在空中交通隔离区划设时, 尽管有目的上的差异但应用目标是一致的(图3)。
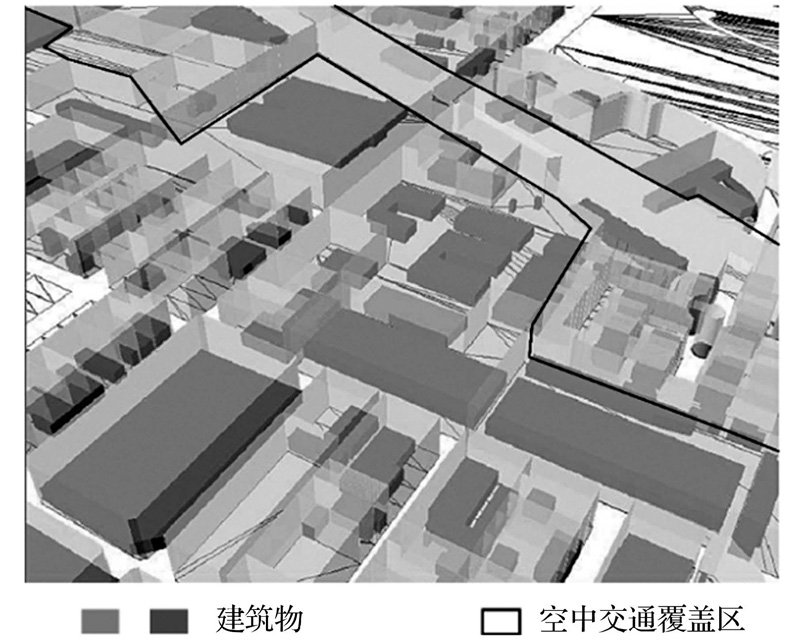 | 图2 空中交通覆盖区划设示意图(据参考文献[14]修改)Fig.2 Diagram of coverage area of air traffic (modified after reference [14]) |
 | 图3 美国联邦政府和地方政府划设的孟菲斯城无人机空中交通隔离区示意图Fig.3 Isolation areas of UAV delimited by federal government and local government in Memphis |
在当前(超)低空空域资源开发与技术应用背景下, 可以将无人机(群)空中网络系统概括为运用视距通信链技术等, 能使无人机节点间有效进行数据共享的协同网络系统, 以合作缩短任务完成时间并增加空中飞行安全[15]。该网络系统由(超)低空空域资源配置、大气气流和气象、无人机操作技术以及地面环境要素所构成[16]。其(超)低空空域资源配置强调监控设施支持下, 实现实时空中交通管理以优化无人机活动通道, 使无人机应用逐步进入民用航空领域; 大气气流和气象要素关注危险天气条件下无人机航线更改、大气气流影响规避与应急管理; 无人机操作技术正在向完整指令代码构建和固定频率加密信息传输方向发展; 地面环境要素不仅要包括地面数据资料收集, 还要包括航线定义和安全操作分析。通过对这些组构要素的协同控制, 可实现无人机活动通道的选择与调整, 依托系统内的自我规划、自我优化、自我配置、自我保护和自我修复等功能保证航空器安全运行。
相对于中高空空域而言, 无人机(群)网络系统具有高流动性、节点稀疏性、可伸缩性、目标独特性等特点[17]。高流动性提出了其拓扑网络快速的动态变化问题和对网络连通性的需求; 节点稀疏性针对无人机节点在一定空域内较低分布密度的情况, 提出了在无人机网络系统中节点间补盲问题, 引发了指定空域内无人机网络密度(如MANET模型等)的讨论[18]; 可伸缩性强调无人机(群)之间的工作和通信, 这逐渐成为无人机(群)网络系统建立的主要目的; 目标独特性提出了飞行“ 不确定性” 和网络“ 临时性” 以及一定的“ 延时性” 问题[15]。基于以上特征, 在该网络系统中数据流量巨大、数据结构多样、汇集位置复杂, 为了保障无人机(群)空中网络系统的协调和协作功能, 需要分析无人机需求特征以进一步优化无人机活动通道的划设方法, 实现对(超)低空空域资源的充分开发利用。
前文已述, 城市区域对商业无人机活动时间和位置的限制, 主要采取对特定空域实施飞行禁止的方式, 即地方政府强制无人机运营商只能在已设定的空中通道内活动。如果反过来将禁止模式替换为选择模式, 对其部分禁止而部分解除, 精确定义无人机空中通道, 将有利于(超)低空空域资源的开发利用。在此分若干无人机活动典型类型, 对其空中通道划设的需求予以描述, 以利于系统构建通道划设方法。
(1) 交通流实时监测和导引的需求。无人机因能较便利地改变飞行高度和任何情况下紧急起飞, 适于动态监测城市交通流热点地区和运动中的车队。Baindur等[19]的研究证实采用无人机收集交通流数据可用于分析流速、流量和流的密度及其之间关系; Lenhart等[20]认为无人机对交通流的视频采集有其灵活性优势, 可以成为评估城市交通流动态变化以及交通流导引的一种新尝试。划设无人机在交通流量实时监测和交通流导引的空中活动通道, 主要是要满足对主干道繁忙交通峰值时间的需求和对流动车队移动的需求。
(2) 新闻采集的需求。2011年11月美国网站记者Matthew成立“ 无人机记者职业协会” , 将无人机新闻采集的特点总结为:基于俯拍的高空间纵深感纪实弥补了传统新闻传播的固定视角, 特别适用于灾难现场等。2014年9月以后已有一批影视传播公司和新闻机构获得FAA授权的无人机新闻采访资格。无人机在新闻传播中主要是对特定区域进行拍摄, 具有突发性和随意性特点, 在其使用过程中需临时划设飞行区域和飞行通道, 其范围的界定和持续的时间都需要与城市区域协调以保证科学划设。
(3) 环境监测的需求。基于无人机平台的大气环境监测系统可以实现对环境的立体监测, 且无人机环境监测范围广、受地形干扰小, 能有效弥补传统环境监测基站、检测车对环境应急监测的不足。目前多无人机协作系统监测污染气团研究已经有所突破。构建陆空一体化的环境应急监测与管理体系是未来无人机在环境检测方面的发展方向[21]。使用无人机按照固定路线进行环境飞行监测可获取不同时段的环境数据, 因其时空相对固定, 通道变化情况较少, 应急机制相对简单, 较易按照区域规则执行。
(4) 急件快投的需求。瑞士邮政(Swiss Post)、瑞士全球货运公司(Swiss World Cargo)与美国马特奈特公司(Matternet)已合作研制并测试了Matternet ONE无人机投递系统, 并在特殊投递环境和投递物品中形成运输能力。Matternet ONE无人机可在距离地面50~100 m的超低空沿内置导航系统设定的目的地和路线飞行。无人机快投业务所需要的严格商业货运通道最具复杂性, 在执行区域规则的过程中突发情况较多, 这是由其商业目的、无人机型号的多样性决定的。商业运行通道除了点对点的航线外, 往往还要考虑在住宅区为所有者建立固定的活动缓冲区。
基于城市区域无人机活动类型的需求, 其飞行通道划设既要有一定的政策支持和使用权限, 也要依据一定的方法在符合城市功能区和建筑物实际情况下选择最优通道, 以穿越繁忙城市中心和交通流量较大的主干道上空。
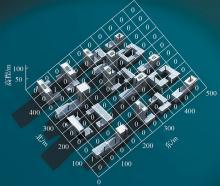
(超)低空空域无人机活动通道的划设, 因飞行区域边界模糊而需要通过可靠的地面建筑参考点予以界定, 这是低空空域的特殊之处, 因此3D城市模型成为无人机活动通道划设的基础方法, 这是一个综合运用空间信息技术、真实反映城市地物的平面位置关系和地物高程信息的应用模型, 可直观进行城市内部空间分析和效果展示。针对不同无人机活动类型对通道的不同需求, 也针对城市建筑环境、地形、道路的复杂性, 3D城市模型已在无人机活动通道划设中得以运用。如Kong等[22]结合栅格数字化区域, 通过地物的三维赋值, 构建了城市区域无人机活动通道的障碍栅格图(图4), 用栅格数字化区域模拟无人机的可飞行区域(0栅格)和需规避建筑障碍区域(1栅格), 实现了无人机活动通道的“ 规避热点图” 设计。
在3D城市模型基础上依据实时更新栅格点数据, 结合高度密度规则、覆盖区规则、隔离区规则, 可构建无人机活动通道划设的最优函数(Cost-to-go)地图方法(图5)。这种新的通道划设尝试, 将无人机活动最优通道问题简化为“ 目标搜索” [22], 即通过城市区域无人机活动通道的障碍栅格图, 实现对街道两侧的高层建筑可视化, 以最小空间成本为目标标记目标栅格(目标A), 计算所有活动通道的时间、速度、水平距离、高度后进行无人机活动通道选择(实线表示最优活动通道、虚线表现其他活动通道)。保证无人机从Ai点快速到达目标A点时与建筑物的间隔, 减少急转指令, 使所选择的无人机活动通道安全可行并节省时间。可见, 3D城市模型基础上的最优函数地图方法, 能实现对无人机活动通道进行最优选择并提高空中交通管理决策水平的目的。
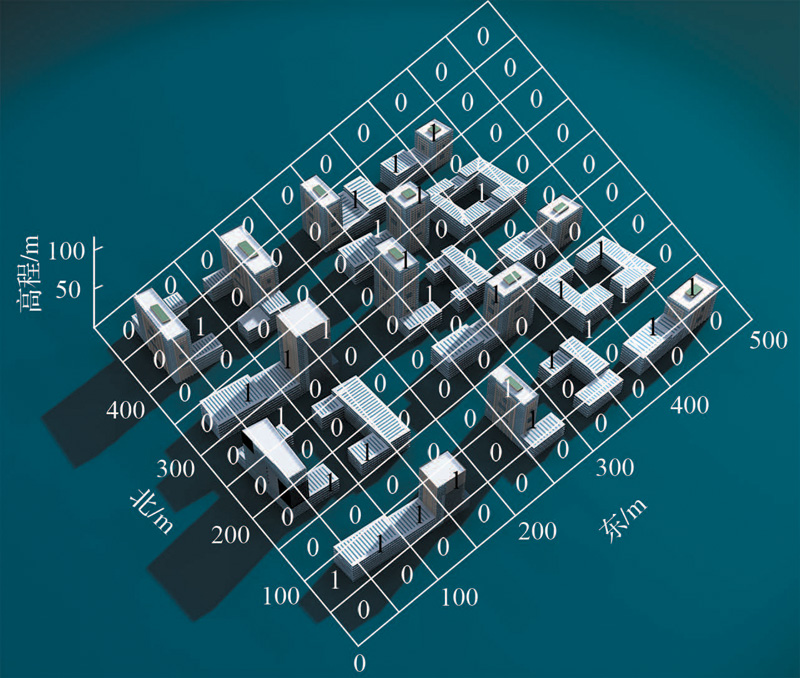 | 图4 城市区域无人机活动3D城市模型障碍栅格图(据参考文献[22]修改)Fig.4 UAV obstacle raster map based on 3D city model in regional areas (modified after reference [22]) |
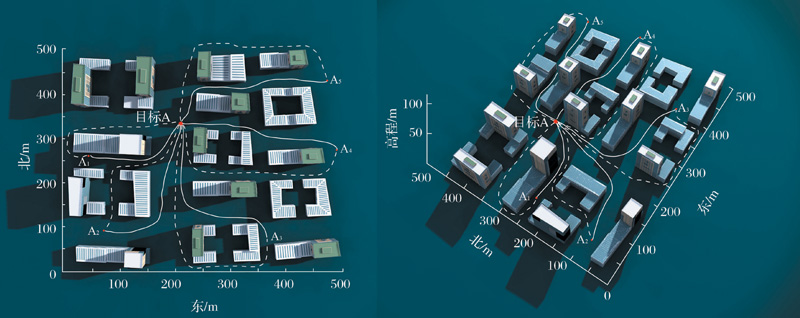 | 图5 基于最优函数地图方法的无人机活动通道选择示意图(据参考文献[22]修改)Fig.5 UAV activities’ aerial lanes selection based on the method of cost-to-go model (modified after reference [22]) |
(1) (超)低空空域资源作为空域资源最接近地表的一部分, 在其开发利用过程中体现出空间资源价值和产能创造的一般特征, 同时源于其与人类地表活动的直接相关性, 表现出与城市高空建筑对低空空域资源的争夺, 其城市区域(超)低空空域无人机活动的连续性问题聚焦于资源利用中限制性因素分析、可飞行区域分析、法律和行政条文对应分析, 具体需落实于规则制订、区域划设和网络构建。
(2) 借鉴美国FAA和地方政府对无人机活动通道划设的实践经验, 可确定城市区域(超)低空空域无人机活动通道划设的高度— 密度一般规则和空中交通覆盖区、空中交通隔离区特设规则, 以保障和促进(超)低空空域资源的有效利用, 协调无人机飞行与地面建筑高度的矛盾。
(3) 基于无人机(群)空中网络系统的要素组构以及城市区域(超)低空空域无人机活动类型需求, 针对城市区域空域资源的边界模糊性及地面建筑的复杂性, 可以3D城市模型障碍栅格图方法为基础, 进一步向最优函数地图方法演进, 实现无人机活动最优通道的选择, 保障无人机(群)空中网络系统的协同管理。
(4) 城市区域(超)低空空域无人机活动通道划设是一种针对人口密集地区解决潜在无人机活动无缝化问题的理想方案, 将进一步提高城市区域(超)低空空域资源灵活使用的精度。过度约束商业无人机的使用以及无人机相关规则、方法上的缺陷都会威胁到(超)低空空域经济的发展。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|