
{kind=link}
多传感器联合反演高分辨率降水方法综述
[郭瑞芳1, 2  , 刘元波
, 刘元波1, * ]
, 刘元波]
|
|


作者简介:郭瑞芳(1986-),女,内蒙古乌兰察布人,博士研究生,主要从事降水遥感研究. E-mail:gr120206@126.com
精确测量具有强烈时空变异性的降水,是水文气象学颇具挑战的科学研究目标之一。基于多传感器联合反演降水(Multi-sensor Precipitation Estimation,MPE)的方法已成为卫星反演降水的主流趋势。首先介绍MPE方法的定义与分类,回顾MPE方法的历史发展阶段及研究现状;然后介绍主要的MPE算法,包括TRMM多卫星降水分析算法(TMPA)、气候预测中心算法(CMORPH)、全球卫星降水制图算法(GSMaP)、美国海军研究实验室联合算法(NRLB)和神经网络降水算法(PERSIANN);对比这5种主要算法的优缺点和反演精度(PERSIANN精度范围为-56%~200%,其他产品为-67%~10%),指出存在的主要问题,并且评价不同类型MPE算法的性能;最后结合目前存在的问题探讨MPE方法研究发展趋势。
Precipitation is a basic output flux of atmospheric process and a driving force of hydrological process. Accurate observation of precipitation with highly spatial and temporal variability has long been a challenging scientific goal in the field of hydrometeorology. Multi-sensor Precipitation Estimation (MPE) has been the mainstream trend for retrieving precipitation. And it has been a unique way of providing global high accuracy and High Resolution Precipitation Products (HRPPs). This paper describes the definition and classification of MPE, and briefly summarizes the development and status of its history. The development of MPE can be divided into two parts based on the year 1997. The commonly used MPE algorithms to produce global HRPPs include TRMM Multi-satellite Precipitation Analysis (TMPA) algorithm, climate prediction center morphing (CMORPH) algorithm, Global Satellite Mapping of Precipitation (GSMaP) algorithm, Naval Research Laboratory Blended (NRLB) algorithm and Precipitation Estimation from Remotely Sensed Information using Artificial Neural Network (PERSIANN). Then, the existing problems are put forward through comparing assets and liabilities and accuracy of the five algorithms. The MPE can be roughly categorized into two methodologies: adjustment-based techniques (TMPA and NRLB) and the motion-based techniques (CMORPH and GSMaP). The adjustmentbased techniques have the longest data record, but inherently rely upon an assumption of indirect relationship between IR temperatures and rainfall rates. The motion-based techniques can provide rain rate at desired intervals. One disadvantage of this approach, however, is that the cloud tops detected by the IR imagery can move at speeds different than the precipitation features below them, and precipitation may not be properly accounted for. At present, no one algorithm performs best in any regime. HRPPs algorithms generally tend to perform best in the convective situations during summer but dropped off considerably when moving into winter and higher latitudes with varied orography. PERSIANN overestimates heavy rainfall (200%) while underestimates rainfall (56%) in the mountains. The other four HRPPs underestimate rainfall ranging from 3 to 7 mm/d(10%~67%). For future development, advanced and/or new MPE algorithms will be proposed with analyzing existing algorithms. Furthermore, the Global Precipitation Measurement (GPM) mission will be improved and extend the TRMM measurement to high latitudes, with a more frequent sampling and higher sensitivity to light and heavy rainfalls. In addition, more focus will be taken on quantitatively evaluating accuracy of HRPPs.
大气降水是全球水文循环的重要变量, 对于维持地球上生命、日常生活及能量平衡具有重要意义[1~2]。降水的时空变异性很强, 常呈现非正态的分布, 所以定量估算降水是非常重要且具有挑战性的难题[3]。传统的测量降水方式为雨量站观测, 但是其空间分布不均匀, 在海洋和高海拔地区分布稀疏, 而且不同雨量站测得的降水数据之间存在不一致性[1, 4]。地基天气雷达可以监测中小尺度降水信息, 但是它造价较高, 分布在人口密集的地区[5]。所以, 利用这些手段很难准确地获得大区域和全球性的降水信息。利用卫星遥感反演降水技术可以克服这些测雨技术不足, 为获取全球降水信息提供了途径。
早期的遥感反演降水主要依赖于被动遥感, 包括静止卫星(Geostationary, GEO)、可见光/近红外传感器和被动微波传感器。GEO卫星主要搭载了可见光/近红外传感器, 被动微波传感器搭载在近地轨道卫星(Low-earth-orbiting, LEO)上。1997年美国发射的热带降雨观测卫星(Tropical Rainfall Measurement Mission, TRMM), 搭载了世界上第一台降水雷达(Precipitation Radar, PR), 开启了利用主动遥感反演降水的时代[6]。表1总结了常用的应用于反演降水的卫星传感器的特征。
遥感反演降水发展至今, 已有50多年历史, 很多学者从不同角度对卫星反演降水算法进行了总结[1~5, 7~23]。根据数据源的不同, 目前已有可见光/红外(Visible/Infrared, VIS/IR)、被动微波(Passive Microwave, PMW)、主动微波(Active Microwave, AMW)与多传感器联合(Multi-Sensor, MS)4种类型反演降水方法(表2)。
目前, 与降水相关的很多领域对不同时空尺度(区域— 瞬时尺度到全球— 气候尺度)的降水数据需求不断增加, 如水文气象学科, 包括水资源、洪水预测、气象预测和水分收支平衡研究均需要使用降水产品[43]。为了满足这些需求, 利用卫星遥感技术已经发展生产了许多降水产品[44]。根据反演原理的不同, 反演算法从统计经验法到半物理法到基于物理原理方法, 使用数据源从比较单一的VIS/IR、微波(Microwave, MW)到MS, 降水产品的精度和时空分辨率不断提高[23]。MPE方法已经成为反演高精度、高分辨率降水产品的主要途径。本文首先介绍MPE方法定义和分类, 简要介绍发展过程与现状, 然后回顾MPE的主要算法, 包括TRMM多卫星降水分析算法(TRMM Multi-satellite Precipitation Analysis, TMPA)、气候预测中心算法(climate prediction center morphing method, CMORPH)、全球卫星降水制图算法(Global Satellite Mapping of Precipitation, GSMaP)、美国海军研究实验室联合算法(Naval Research Laboratory Blended, NRLB)和神经网络降水算法(Precipitation Estimation from Remotely Sensed Information using Artificial Neural Network, PERSIANN)算法, 最后对比这五种主要算法的优缺点和反演精度, 指出存在的主要问题和可能的改进途径。
| 表1 用于反演降水的主要卫星传感器主要特征 Table1 The basic characters of satellite sensors for precipitation retrieval |
单一的VIS/IR、PMW反演降水都各有优缺点。VIS/IR时空分辨率高, 但是缺乏物理基础, 属于间接估算, 估算瞬时降水速率精度不够; 而PMW时空分辨分辨率低, 但是有较直接的物理关系, 估算瞬时降水速率精度较高。基于VIS/IR和PMW各自的优点和缺陷, MPE方法应运而生, 目的在于充分利用不同数据和方法的优势, 克服单一方法反演降水的不足[45, 46]。
Turk等[47]等给出MPE方法的定义为:结合直接方法(基于PMW反演降水方法)和间接方法(基于IR亮温反演降水方法), 收集不同时空分辨率数据源, 利用尺度转换和归一化处理生产降水产品的过程。该定义仅适用于部分的MPE方法。本文将MPE方法定义为:以GEO-IR和/或LEO-PMW为主要数据源, 并以星载降水雷达、地基雷达、其他卫星数据以及地面站点降水数据、雷电、风等其中一种或者几种为辅助数据, 利用数学和/或物理方法反演降水速率的过程。
迄今为止, 已经提出了很多种MPE方法。根据主要数据源的不同, 可以分为PMW-IR、PR-PMW、PR-IR和PR-PMW-IR。最常见的MPE方法是PMW-IR。根据MS联合方法的不同, 主要可以分为2类:标定法和云迹法[48]。标定法是建立GEO-IR和MW的经验关系, 以此对IR做校正或者调整, 利用校正后的IR估算的降水速率。最常见的标定法是用PMW反演/估算的降水速率校正或者调整IR估算的降水速率, 从而得到精度较高的降水速率数据。标定法可以细分为3类:①地球静止业务环境卫星(Geostationary Operational Environmental Satellites, GOES)降水指数(GOES Precipitation Index, GPI)校正法, 利用MW校正GEO-IR反演/估算的降水速率[49~51]; ②回归法, PMW反演/估算降水速率直接建立与IR亮温(Temperature Brightness, Tb)的回归关系, 基于此回归方程校正降水速率[52~55]; ③直方图或者概率匹配法, PMW反演/估算的降水速率的累计分布函数和IRTb进行匹配, 从而获取IRTb和降水速率的对应关系[35, 39, 58, 59]。云迹法是基于IR获取云迹对PMW反演/估算进行插值, 从而得到大范围的降水速率数据[36~38, 66]。目前, MPE方法大多数属于标定法, 而云迹法较少。表3列出了已有的MPE方法。
| 表3 MPE方法分类 Table3 Classification of MPE |
MPE方法发展过程可以划分为两个阶段, 以1997年为分界。第一阶段为初步发展阶段, 主要是探讨MPE方法, 研究区为局地, 研究时间段较短, 采用的数据源以地面测量数据、GEO和PMW数据(主要是SSM/I数据)为主, 反演的降水数据分辨率较粗(2.5° × 2.5° , 月)。该阶段主要标志是发展了调整GPI(AGPI)方法, 并且发展了全球降水气候项目(GPCP)月降水数据集和气候预测中心降水合成(Climate Prediction Center Merged Analysis of Precipitation , CMAP)数据集。1997年后, MPE方法进入了蓬勃发展阶段, 随着数据源的多元化, 尤其是TRMM卫星的发射, MPE方法逐渐成熟, 研究区从局地转为全球, 分辨率越来越精细(0.25° × 0.25° , 3小时)。该阶段主要标志是发展了TRMM、GSMaP、CMORPH、NRLB、PERSIANN等高时空分辨率降水数据集
MPE方法发展于20世纪80年代末, 由世界气候研究计划项目(World Climate Research Programme, WCRP)首次提出的。WCRP在1985年组织检验了可以用于反演全球降水的各种方法, 得出结论:结合不同卫星数据及其反演/估算降水方法, 如联合GEO-IR阈值法、LEO-PMW反演/估算降水法和地面观测数据, 可以获取全球的月降水数据。1986年WCRP启动了GPCP[67]。
最早的MPE方法是AGPI, 用于反演气候尺度(2.5° × 2.5° , 月)的降水数据。AGPI首先建立PMW反演的降水速率与IR估算的降水速率的比例系数, 然后用此系数校正IR估算的降水速率[49, 58, 59]。之后, Xu等[51]对AGPI做了改进, 提出了通用AGPI(UAGPI)算法, 同样用于反演月降水数据。GPCP降水数据集版本1(GPCP V1, 2.5° × 2.5° , 月)[60, 61]、GPCP日降水数据集(GPCP 1DD, 1° × 1° , 天)[63]和GPCP降水数据集版本2(GPCP V2, 2.5° × 2.5° , 月)[62]均用到了AGPI。GPCP降水数据集版本2有2方面的扩展, ①结合出射长波辐射降水指数(Outgoing Long-wave Radiation Precipitation Index, OPI)数据, 将GPCP降水数据集版本1(1987年开始)进一步扩展到1979年; ②结合电视和红外辐射观测卫星(Television and Infrared Observation Satellite, TIROS)业务垂直探测器(TIROS Operational Vertical Sounder, TOVS)数据, 获取了40° ~50° S 和40° ~50° N较高纬度的降水数据。
CMAP是另一种利用MPE方法反演的降水数据集(2.5° × 2.5° , 月)。Xie等[68, 69]尝试联合IR和PMW数据与地面站点数据获取全球月降水数据, 建立了18个月(1987年7月— 1988年12月)的月降水数据集。结合OPI, Xie等[26]将该数据集延续到17年(1979年— 1996年)。基于以上的研究, Janowiak等[70]提出气候异常检测系统-OPI方法, 也是用于反演月降水数据。
Vicente等[52]首次提出用MPE方法反演瞬时降水速率, 建立PMW降水速率和IR Tb的回归关系, 然后校正IR估算的降水速率数据, 用校正后的IR反演降水速率。此后, 很多学者尝试获取小时到天尺度的降水数据[50, 71~73]。特别是Jobard等[71]提出基于PMW-IR的雨和云自动分类(rain and cloud classification, RACC)方法反演瞬时降水; Liu等[74]提出利用IR云顶特征与PMW散射和发射信号反演瞬时降水速率。利用VIS、NIR和IR光学技术, 进一步发展云检测、云分类以及云参数反演的方法, 可以支持检测不同类型的降水。联合PMW和多光谱方法成为MPE方法的重要思路之一[55, 75, 76]。
第一届国际降水会议(International Precipitation Workshop Group, IPWG)上Levizzani等[77]提出多光谱方法检测云顶信息, 包括云的特征(有效半径, 光学厚度, 超冷水滴等)、云的类型(海洋— 大陆, 对流— 层状云), 以及其他云参数可以提高PMW反演降水的能力。特别是由Joyce等[36]提出的CMORPH算法, 该算法利用IR获取云迹对PMW数据做插值, 最后得到高时空分辨率的降水产品。Ushio等[37]发展了GSMaP-MVK算法, 该算法与CMORPH算法相似。Bellerby[78]提出了Lagrangian 模型算法, 结合了基于高分辨的GEO-IR数据获取的2D云运动踪迹和PMW数据。Behrangi等[66]基于Lagrangian模型(Lagrangian Model, LMODEL)算法提出了微波前向校正平流反演降水算法(REFAME)。
1997年后, 随着TRMM卫星和地球观测系统(Earth Observation System, EOS)卫星的发射, 分别搭载有微波成像仪(TRMM Micrpwave Imager, TMI)、先进微波扫描辐射计(Advanced Microwave Sounding Radiometer-Earth, AMSR-E), 为MPE方法发展提供了更广泛的数据支持。而且, 至此以后MPE方法主要是用于生产高分辨率(空间分辨率小于0.25° , 时间分辨率为天或者小时)的降水产品。Turk等[79~80]提出基于直方图或者概率匹配法的PMW-IR方法, 该方法最早由Manobianco等[81]提出。越多的PMW传感器过境, 匹配的有效性越高。该方法主要目的是结合特种微波成像仪(Apecial Sensor Microwave/Imager, SSM/I)、TMI、先进微波垂直探测器-A型(Advanced Microwave Sounding Umit-A, AMSU-A)、先进微波垂直探测器-B型(AMSU-B)等微波传感器和GEO-IR数据生产全球高时空分辨率的降水速率数据。利用MW-IR直方图或者概率匹配法MPE方法有很多, 如TMPA算法[35]、NRLB 算法[39]、微波近红外反演降水算法(MIRRA)[54]、Anagnostou算法[56]、微波近红外反演降水速率算法(MIRA)[57]、微波-近红外联合降水算法(MICRA)[64]、被动微波— 近红外算法(PMIR)[65]等。
IR-PMW是MPE 的主要方法, 除IR-PMW之外, 还有PMW-PR方法, 如TRMM 2B31算法[82], IR-PR方法[83]和PR-PMW-IR方法(如TRMM 3B43算法)。PR的主要作用有:①提供云的结构和云运动变化状态信息; ②PR估算的降水垂直分布廓线; ③为反演的降水结果提供参照标准。另外, PERSIANN[40~42]是以地基降水雷达数据为参照数据, GEO-IR为主要数据源, 利用神经网络方法反演的降水产品。Grecu等[84]提出了结合云、地面雷电(Lightning, LIS)数据和IR数据反演对流雨的方法, 认为结合TRMM PR、TMI和LIS数据可以用于检测热带、亚热带地区的降水结构, 证实以地面或者星载LIS数据可以有效地提高反演降水近20多年, MPE方法层出不穷, 但是用于生产全球降水数据集的并不是很多。目前, 应用于全球降水检测与研究的降水产品有GPCP、CMAP、TRMM、GSMaP、CMORPH、NRLB、PERSIANN等。其中GPCP包括GPCP V1、GPCP V2、 GPCP 1DD和每五日GPCP 4种降水产品。TRMM降水数据集包括多种降水产品, 如TRMM 2A12、TRMM 2A25、TRMM 2B31、TRMM 3B42、TRMM 3B43等。详细信息可见http://trmm.gsfc.nasa.gov/data_dir/data.html。GSMaP包括有GSMaP_TMI、GSMaP_MWR、GSMaP_MWR+、GSMaP_MVK、GSMaP_MVK+。
目前, 已有MPE方法反演的全球高分辨率降水产品(High Resolution Precipitation Products, HRPPs)主要包括TMPA、CMORPH、NRLB、PERSIANN和GSMaP(表4)。下面详细介绍每一种算法的输入输出数据、主要原理及算法主要流程。
TMPA是由Huffman等[35]提出的多卫星传感器降水分析算法。TMPA降水产品由美国国家航空航天局(National Aeronautics and Space Administration, NASA)TRMM科学数据信息系统的降水处理系统生产。该算法采用一个基于定标的排序方案, 将MS数据以及地面降水数据结合起来, 获得时、空分辨率分别为0.25° × 0.25° 、3小时的降水产品。
| 表4 HRPPs反演算法基本信息 Table4 The basic information of HRPPs retrieval algorithms |
TMPA算法首先利用PMW数据反演得到降水速率[31~33], 将± 90分钟时间段内的降水速率平均到0.25° × 0.25° 格网上。AMSR-E以2个月为标定时间段, 其他PWM数据标定时间段为2个月, 采用一个基于定标的排序方案[85], 利用TRMM联合仪器(TRMM Combined Instrument, TCI)数据对降水速率进行标定, 得到高质量(High Quality, HG)的降水速率。对于GEO-IR数据, 将其转换为3小时、0.25° × 0.25° 的Tb数据, 在1个月时间段内, 选择3° × 3° 窗口, 利用时空直方图法, 结合HG降水速率生成HQ-IR标定系数, 以此系数校正Tb估算降水速率。然后将HG降水速率与IR Tb估算的降水速率结合起来, 结合的原则是:在没有HG的降水速率数据的区域用IR Tb估算的降水速率, 否则用HG的降水速率, 生成3B42RT产品。将3小时的降水速率累计为月数据(Monthly Multisatellite, MS), 利用Huffman等[61]方法与站点数据结合生成站点结合(MS-Gauge, SG)数据, 计算SG/MS比值, 将该比值应用到3小时的降水速率数据, 最终获得3小时0.25° × 0.25° 的TRMM 3B42产品。
CMORPH是由Joyce等[36]提出的气候预测中心算法。该算法利用GEO-IR数据获取云迹信息, 对PMW反演的降水速率进行插值, 从而得到时、空分辨率分别为0.07° × 0.07° 、半小时的降水产品。整个过程中, 降水时空分布完全取决于PMW, 并不依赖于IR数据的大小。该数据由美国国家海洋和大气局(National Oceanic and Atmospheric Administration, NOAA)的气候预测中心(Climate Prediction Center, CPC)生产。
该算法先利用PMW反演得到降水速率[29~33], 重采样到0.07° × 0.07° 。当PMW数据有重叠时, 如果PMW来自同一传感器, 重叠区域的降水速率用均值代替; 如果来自不同传感器, 优先用TMI反演得到的降水速率, 其次是SSM/I, 最后是AMSU-B; 如果有的区域PMW数据没有覆盖, 则对其最邻近像元做反距离加权插值处理, 得到降水速率。为了与PMW反演的降水速率匹配, IR数据也重采样到0.07° , 在5° × 5° 区域内, 对GEO-IR数据循环地做空间滞后相关处理, 计算云的运动速度和方向, 得到云平流向量(Cloud System Advection Vectors, CSAVs)。因为在北半球从东向西、从南向北的平流速率太大, 所以利用NEXRAD雷达降雨数据对CSAVs进行校正。利用校正后的CSAVs对PMW反演的降水速率进行插值。
Ushio等[86]首次提出GSMaP计划, 该计划始于2002年, 由日本科学技术机构(Japan Science and Technology Agency, JST) 推进科学技术核心研究中心(Core Research for Evolutional Science and Technology, CREST)生产。2007年之后, 由日本宇航研究开发机构(Japan Aerospace Exploration Agency, JAXA)降水测量计划(Precipitation Measuring Mission, PMM)地球观测研究中心(Earth Observation Research Center, EORC, EORC)生产。目的是利用卫星数据研发基于物理模型反演降水速率的算法, 生产全球高精度、高分辨率的降水产品。GSMaP_MVK是由Ushio等[37]基于CMORPH算法基础上的提出的, 利用Geo-IR数据获得云平流矢量, 对PMW反演的降水速率进行插值, 最后用卡尔曼滤波得到时、空分辨率分别为0.1° × 0.1° 、1小时的降水产品。GSMaP_MVK+在GSMaP_MVK基础上又结合了AMSU-B产品。
该算法首先利用Geo-IR数据建立云平流矢量。利用时间分辨率为1小时的两景连续的IR影像(即t=0与t=1)组成, 计算互相关系数。如果t=1时影像在经向和纬向上滞后于t=0时影像, 互相关系数用于计算空间偏差。如此设置不同横向偏差反复计算, 寻找获得最大系数时的横向偏差, 最终得到平流矢量。结合PMW反演获得降水速率[28~31], 根据CMORPH算法CSAVs对PMW的插值算法原理, 利用平流矢量对PMW做插值处理, 得到预测的降水速率。最后利用卡尔曼滤波得到更精确的降水速率。
NRLB[39]是由美国海军研究实验室开发并且生产的降水产品。NRLB基于Geo-IR和PMW所有匹配像元, 形成IR Tb-降水速率查找表(Lookup Table, LUT), 最终得到时、空分辨率分别为0.25° × 0.25° 、3小时的降水产品。
该算法利用PMW反演得到降水速率[28~33], 以TRMM-PR为参照数据, 在没有该数据的区域, 以SMMI数据为参照数据, 利用直方图频率匹配法将其他PMW反演的降水速率的统一到参照数据, 保证PMW降水速率的有效性。然后将所有GEO-IR数据转换为3小时、0.25° × 0.25° 的Tb数据, 在以2° × 2° 像元为中心的3× 3窗口区域内, PMW反演的降水速率与时间(观测时间前后15分钟时段内)、空间一致的Tb建立概率匹配关系, 获得Tb-降水速率LUT, 将LUT应用于GEO-IR, 获取全球降水产品。随着全球运行的PMW和GEO-IR数据, 全球LUT不断进行更新, 近于实时不断的生产降水产品。
PERSIANN是美国亚利桑那州立大学(Arizona)利用神经网络方法(Artificial Neural Network, ANN)反演得到的降水产品。PERSIANN最初由Hsu等[40]提出, 以AMeDAS、NEXRAD地基雷达数据为参照数据, 以IR(GMS)Tb数据, 用自组织结构图(Self-organizing Feature Map, SOFM)方法计算获得的6个参数为输入变量, 利用神经网络方法, 反演0.25° × 0.25° 、3小时的降水产品。Sorooshian等[41]又提出PERSIANN改进算法(PERSIANN Adjusted)。与PERSIANN方法不同之处是, 利用PMW对输入参数做验证和校正, 最终反演得到0.25° × 0.25° 、0.5小时的降水速率产品。
PERSIANN CCS(PERSIANN Cloud Classification System, PERSIANN CCS)[42]是在PERSIANN 算法基础上, 增加了云分类系统和Tb-降水速率关系校正过程。PERSIANN CCS算法以Geo-IR为数据源, 利用渐增温度阈值法(Incremental Temperature Threshold, ITT)将影像分为2类:云和非云。对云像元提取云结构信息, 共包括9个参数。然后用GOES-IR数据和雷达数据对这9个参数做校正, 校正后将其作为输入参数, 以雷达数据为参照数据, 用SOFM方法对云进行分类。而且在云的不同阶段, 赋予不同的Tb-降水速率关系, 最终得到半小时、0.04° × 0.04° 降水产品。
HRPPs算法利用的数据源和方法均不同, 因此其反演降水的能力不同, 表5总结了HRPPs算法优点和缺点。CMORPH和GSMaP-MVK(+)算法属于云迹法, 其优势是不需要建立IRTb和降水的间接关系; 缺点是云的运动变化可能并不能代表地表降水的模式, 而且时间分辨率较低的PMW反演的地表降水速率的变化, 可能并不能真实反映到最终的降水产品中。PERSIANN算法具备以下特点, 可以从多个输入变量中提取有用信息, 在一个多维的输入— 输出空间下进行复杂的分类和快速计算大量数据, 当地面数据或者其他数据源存在时, 可以自动更新计算。总体来讲, 该算法计算相对简单、迅速, 但是缺乏物理基础。TMPA和NRLB算法属于标定法, 计算速度快, 与云迹法不同, 标定法反演的降水产品质量取决于IR和PMW二者分别反演降水速率的质量, 而不是太过于依赖PMW。其缺点是需要建立IRTb和降水的间接关系, 而这种关系缺乏物理基础。
| 表5 HRPPs算法优缺点 Table5 Advantages and limitations of HRPPs algorithms |
HRPPs算法存在的共同问题主要有3点, 首先这些算法均依赖于PMW反演降水速率的质量, 标定法需要PMW反演的降水速率来校正IR数据, 而云迹法的反演结果空间分布上取决于IR数据, 但是降水速率值的大小完全依赖于PMW。其次, 因为PMW时间分辨率低, 所以反演高时间分辨率降水数据需要联合不同传感器来源的PMW数据, 这些数据存在差异性, 而且不同来源的PMW数据反演降水速率采用的算法也不同, 这些因素均会影响降水产品的质量。最后HRPPs对冷季降水、弱降水、极强降水、地形降水和冷下垫面降水反演精度不够。
Tian等[87]研究发现, ①HRPPs反演大于40 mm/d的降水的精度总体上均较高, 存在夏季高估和冬季低估的现象, 不同产品的误差大小不同, 有时高估或者低估可达50%; 对于小于10 mm/d的降水, HRPPs正确检测率为60%。②在夏季, 大部分HRPPs高估可达50%; 在冬季, 所有的HRPPs检测不到山区和美国北部区域的降水(可能是雪)。Tian等[88]研究了HRPPs在天、0.25° × 0.25° 尺度上的不确定性, 总体上, HRPPs反演海洋下垫面降水的不确定性相对较小, 为40%~60%, 尤其是热带和南美地区。但是在高纬度(大于40° )尤其是冷季节时, 不确定性较大, 为100%~140%。在复杂地形的区域, 如青藏高原和安第斯山脉, 以及海岸线和水体下垫面情况下, 不确定性也较大。另外, 降水产品的不确定性和降水强度也有关系。总的来说, 在热带海洋强的对流雨区域, 不确定性最小; 而在复杂下垫面、冷季节弱降水区域, 不确定性最大。因此, 卫星降水产品的定量评价与下垫面状况、纬度、季节和降水类型等有很大关系。
世界气象组织(WMO)于2007年倡导并实施了高分辨率卫星遥感降水反演评估计划(Program to Evaluate High Resolution Precipitation Products, PEHRPP)[89], 主要是评价HRPPs的精度[48, 90], 研究区包括澳大利亚[90]、美国[90~92]、欧洲[90]、印度[93]等。除PEHRPP之外, 很多学者也对HRPPs做了研究, 我国学者以中国不同地区为研究区主要对TRMM 3B42数据做了精度检验研究[94~98]。这些研究有的评价了在天/小时、0.25° × 0.25° 尺度上HRPPs的精度[99~104], 也有很多学者等评价了在月/季/年尺度上HRPPs的精度[91, 105~107]。图1给出了HRPPs的精度范围比较结果, 总体上PERSIANN存在高估现象, 对于极强降水, 高估约200%, 但是在山区, 存在低估现象, 低估约56%。而其他产品均存在低估现象, 范围为3~7 mm/d, 低估了10%~67%。
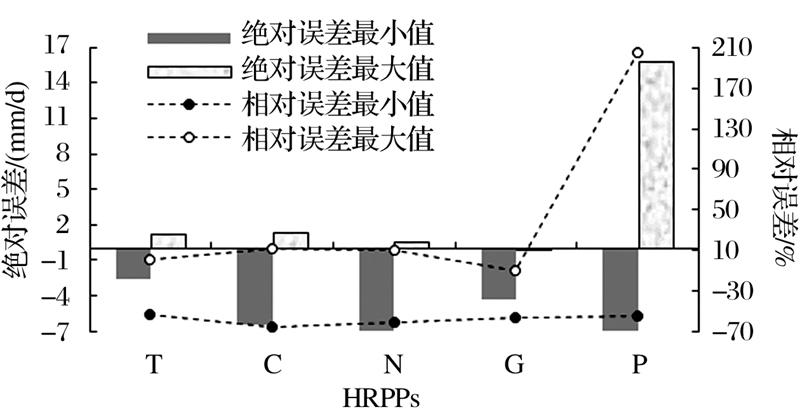 | 图1 逐日、0.25° × 0.25° 尺度上HRPPs精度比较Fig.1 The comparison of HRPPs accuracy on day, 0.25° × 0.25° scaleT: TRMM 3B42, C: COMRPH, N: NRLB, G: GSMaP-MVK(+), P: PERSIANN-CCS) |
这些已有的验证研究不仅为研发者改进MPE方法提供了依据, 而且促进了使用者对降水产品更多的了解。基于PEHRPP和其他验证研究, HRPPs精度比较结果为:PERSIANN存在高估现象, 尤其对极强降水, 高估的误差较大, 但是在山区, 对极强降水存在低估现象。TRMM 3B42和CMORPH在埃塞俄比亚地区的反演精度很高; 在印度地区, TRMM 3B42比PERSIANN精度高; 在长江流域, CMORPH表现为暖季节时低估, 而冷季节时高估; 在澳大利亚、美国和欧洲, CMORPH反演精度最高。因此, 可以得出结论①目前, HRPPs在不同情形下(下垫面情况, 季节, 纬度, 降水强度等)精度不同, 存在高估或者低估现象; 没有一种降水产品在各种情形下, 其精度均是最高的; ②HRPPs对冷季降水、弱降水、极强降水、地形降水和冷下垫面降水反演精度较低; ③不同的时间、空间尺度上, HRPPs的精度不同。因为不同的研究选择的研究区、时间段、下垫面状况、降水产品时空尺度等均不同, 所以, 想要明确具体情形下哪种HRPPs的精度最高是非常复杂的问题。
MPE方法已经发展了20多年, 其研究主要包括以下几点:①发展新的MPE算法, 旨在提高降水产品的时、空分辨率和精度; ②分析HRPPs不确定性及误差来源, 同时对比验证HRPPs的精度; ③分析HRPPs在水文模型等应用中误差估算的问题。GPCP的AIP[45, 46]和PIP[108~110]计划、IPWG的PEHRPP计划促进了MPE方法和HRPPs的发展[111, 112]。在发展过程中, MPE方法主要存在4方面的问题:①MPE方法反演降水均依赖于PMW, 不同传感器来源的PMW数据及其反演降水采用的算法不同, 这些因素均会影响降水产品的质量。②已有的HRPPs时间分辨率为0.5~3小时, 空间分辨率为0.04° ~0.25° , 并不能满足所有用户的需求。③已有的MPE算法对冷季降水、弱降水、极强降水、地形降水和冷下垫面降水反演精度不够。④HRPPs各有优缺点, PERSIANN精度范围为-56%~200%, 其他产品为-67%~10%。
基于MPE方法的研究内容和存在问题, MPE方法未来发展方向主要有3部分。第一, 通过定量对比分析MPE算法的不确定性及误差来源和分布特点, 改进已有的MPE算法和发展新的MPE算法, 从而提高反演降水的能力(包括降水产品的时空分辨率和精度)。第二, 算法改进或者提出新算法需要数据源支持, 已有的GEO、TRMM和其他搭载PMW传感器的卫星组成的虚拟星座为MPE发展提供了数据源。全球降水观测(Global Precipiation Measurement, GPM)计划作为反演降水的虚拟星座重要部分, 是继TRMM之后另一颗专用于检测降水的卫星, 于2014年2月28日发射上天, 携带了双频(Ku/Ka)降雨雷达(Dual Frequency Radar, DPR)和GPM微波成像仪(GPM Microwave Imager, GMI), 可以检测更高纬度(65° )的降水, 对弱降水更敏感, 具备检测雪的能力, 可以为MPE提供新的MW数据源。另外, 欧洲第三代气象卫星(MTG)、美国的GOES-R、中国FY-4卫星等均可为MPE方法提供新的GEO-IR数据源。第三, 加强MPE方法反演降水产品的精度检验研究, 深入分析气候区、下垫面条件、季节和纬度等不同情形下降水产品的精度检验研究, 是推动MPE方法发展的重要保障。
| 附表1 卫星反演降水相关的术语 Appendix table Relevant Abbreviations and Definitions about satellite-based retrieval precipitation |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
|
| [61] |
|
| [62] |
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
|
| [78] |
|
| [79] |
|
| [80] |
|
| [81] |
|
| [82] |
|
| [83] |
|
| [84] |
|
| [85] |
|
| [86] |
|
| [87] |
|
| [88] |
|
| [89] |
|
| [90] |
|
| [91] |
|
| [92] |
|
| [93] |
|
| [94] |
|
| [95] |
|
| [96] |
|
| [97] |
|
| [98] |
|
| [99] |
|
| [100] |
|
| [101] |
|
| [102] |
|
| [103] |
|
| [104] |
|
| [105] |
|
| [106] |
|
| [107] |
|
| [108] |
|
| [109] |
|
| [110] |
|
| [111] |
|
| [112] |
|