{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
模式时间关联误差对集合平方根滤波估算土壤湿度的影响
[毛伏平1, 2  , 张述文
, 张述文1 , 叶丹1 , 杨茜茜1 ]
, 张述文, 叶丹|
|


毛伏平(1988-),男,安徽舒城人,硕士研究生,主要从事陆面数据同化研究. E-mail: maofp12@lzu.edu.cn
为了定量评估模式时间关联误差对NOAH陆面模式同化表层土壤湿度观测估算土壤湿度廓线的影响,采用集合平方根滤波(EnSRF)与状态增广相结合的技术,开展同时更新状态变量和订正模式偏差的观测系统模拟试验,结果表明:同化时若不对存在较大系统性偏差的模式时间关联误差进行处理,EnSRF就不能有效估算土壤湿度廓线,而采用状态增广和EnSRF相结合的技术,可以在更新土壤湿度时同步订正模式偏差,土壤湿度估算精度明显提高。敏感性试验进一步表明:模式偏差大小、同化时间间隔和观测误差会以不同方式对同化结果造成影响。
To evaluate the impacts of time correlated error models on the estimates of soil moisture profiles with the Ensemble Square Root Filter (EnSRF), an observing system simulation experiment was set up, in which the near-surface soil moisture observations were assimilated into NOAH Land Surface Model (LSM). The experiments used a combination technique of EnSRF and state augmentation, in which both the model states and model errors were updated at the same time. The results showed that EnSRF could not successfully estimate the soil moisture profiles, if a large model bias was directly ignored in the process of data assimilation. On the contrary, the soil moisture estimates had a large improvement, if the model errors were corrected. Furthermore, the sensitive tests showed that the value of model bias,the magnitudes of observational errors and the time intervals would all influence the estimates in the different way.
陆面数据同化在吸收大气和海洋数据同化经验的基础上, 于20世纪90年代末逐步建立起来[1, 2], 虽然起步较晚, 但发展较快[2~5]。不过由于陆面过程的复杂性, 在模式结构、参数设定以及数值计算上或多或少都存在误差[6, 7], 其中有偏的误差(即误差的均值不等于0, 下文简称偏差)会直接影响陆面数据同化的整体效果, 因此在陆面数据同化中处理模式偏差非常必要[8, 9], 同样, 观测误差和同化算法也会影响同化效果[3]。经典卡尔曼(Kalman)滤波要求模式误差和观测误差是均值为零的高斯白噪声, 只有满足这些条件, 分析场才是最优的。然而现有陆面过程模式的预报水平还不高, 常包含误差, 有些误差还存在时间关联性(即有色噪声)[3, 10]。Zhang等[11]曾指出土壤湿度误差沿着土壤深度方向传递存在时间滞后性, 也就是说误差具有时间关联特征, 须在Kalman滤波同化过程中考虑其影响。Dee等[8, 12]指出模式预报或观测资料有偏时, 同化后的分析场也是有偏的, 同化观测资料只能部分降低偏差的影响。针对地下水模拟中存在的有偏时间关联误差, Dré court等[13, 14] 采用ColKF (Colored noise Kalman fi lter )方法同时进行模式状态更新和偏差订正, 结果显示ColKF方法优于不考虑误差影响的标准Kalman滤波。
集合Kalman滤波(EnKF)(包括其他变形形式)是在传统Kalman滤波基础上发展而来, 它采用集合样本来估算背景场的误差协方差阵, 简便易行, 目前已成为陆面数据同化研究中的主要同化方法之一[15]。尽管如此, EnKF仍需满足模式不存在偏差且误差无时间关联的条件才能得出状态的最优估计, 然而土壤湿度具有“ 记忆” 能力[16], 模式误差信息在模式运行过程中, 会伴随这种“ 记忆” 能力影响下一时刻土壤湿度的预报精度, 误差具有时间关联性。当前陆面数据同化对存在有色噪声情况的研究很少, 尤其是时间关联误差对EnKF估算土壤湿度廓线影响的全面评估方面。因此, 为了充实该方面研究并保证评估结果不受未知因素的干扰, 本文采用观测系统模拟试验(又称理想试验)手段, 在同化地表观测资料改进土壤湿度廓线的同化试验中, 首先探究有色模式噪声对分析场的影响, 然后评估状态增广(state augmentation)与EnKF相结合的同化方案处理时间关联误差和改进分析场的能力, 最后借助敏感性试验, 探讨模式误差和观测误差各自大小以及同化时间间隔对同化结果的影响, 分析本文同化方案的不足和原因。
本文采用NOAH陆面模式3.4.1版本, 该模式最先由美国环境预报中心提出, 由2层水文模式发展而来[17], 既可以单独离线运行, 也可以与WRF(Weather Research and Forecasting Model)等大气模式耦合运行, 目前已在美国国家环境预报中心等机构投入业务使用[18]。模式土壤分为4层, 文中设定的四层土壤厚度自上而下分别为5, 10, 30, 55 cm, 所用参数以及大气强迫数据均为模式自带数据包, 模式状态变量主要有土壤湿度、土壤温度、地表能量通量等。
NOAH陆面模式土壤水的运动方程基于一维Richards方程:
式中:
NOAH陆面模式使用Campbell[19]经验公式来描述土壤导水率、基质势和土壤湿度之间的非线性关系:
式中:Ks表示饱和导水率,
2.2.1 集合平方根滤波(EnSRF)
作为EnKF的一个衍生版本, EnSRF同样是用集合样本来代替模型状态后验概率密度函数, 即用集合样本来估算背景场误差协方差, 但是EnSRF不像一般EnKF那样须对观测值添加扰动, 避免了不必要的采样误差, 因此本文选取它作为理想试验的同化方法。下面对EnSRF做简要介绍, 具体参考文献[15]。
假设一个n维模式状态变量X可以分解为集合均值和偏离值两项, 即X=
式中:a表示分析场, b表示背景场, y0表示观测矢量, H表示观测算子, K和
式中:R表示观测误差协方差矩阵, T表示矩阵的转置, Pb表示背景场误差协方差矩阵, 其具体形式为:
式中:N表示集合大小, 对于单一观测而言, 并假设
2.2.2 状态增广和集合平方根滤波相结合的同化方案(AEnSRF)
经典卡尔曼滤波假设模式误差是高斯白噪声[20], 而对误差模型已知的有色噪声, 可以通过状态变量增广将模式误差包含在卡尔曼滤波框架内, 实现同化观测资料在更新模式状态变量时订正模式误差[21], 从而满足经典卡尔曼滤波的正态无偏假设。下面对AEnSRF作简要介绍。
假设模式状态变量为N, 模式噪声为
式中:M为模式算子, 下标k表示时间步, 模式噪声
把公式(10)和(11)写成矩阵的形式, 即:
对应预报方程为:
式中:f表示预报场。同化步骤与2.2.1节类似, 只是其中变量包含了误差项且预报方程变成(13)式。
以一阶线性自回归Markov模型来模拟误差随时间的演变, 具体形式如下:
上式中
式中:
所选模式共有4层, 试验中取
试验采用可加的直接随机扰动方案[7], 即在土壤湿度预报值上直接加上模式误差, 代入上述误差模型后, 土壤湿度的演变就变为:
式中:
第1类:引入的扰动是有偏的, 即wk的均值不等于0, 并取η 0等于0, 以此来突出误差在传播过程中的累积效应。
第2类:引入的扰动是无偏的, 即wk的均值等于0, 而初值η 0不等于0, 以此来强调初始误差的影响。
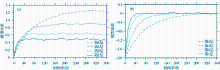
为了对所加误差模型有更直观的了解, 图1给出第1类情况w=0.1以及第2类情况η 0=-2.0时, 对应4层的马尔科夫误差模型η 随同化时间步的变化。可以发现:2类误差模型都是深层误差大于表层, 但随时间变化存在明显差异; 第1类开始值很小, 然后逐渐增大到一定量后保持不变, 而第2类则相反, 开始值较大但随时间向前推进逐渐衰减为0。
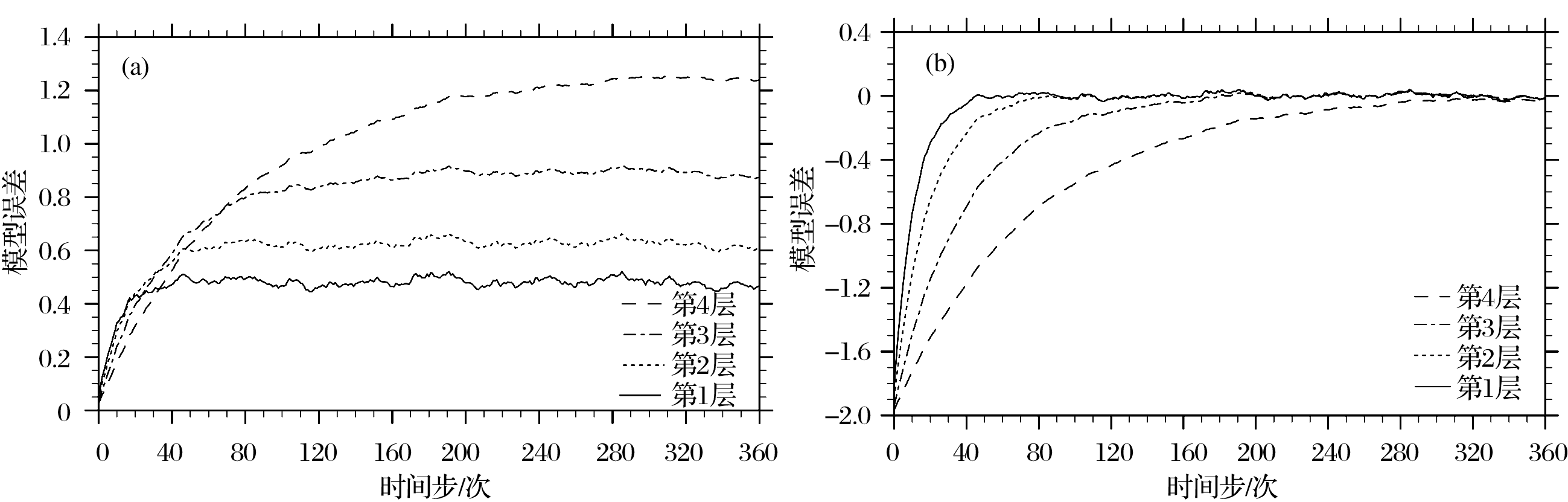 | 图1 模型误差随同化时间步的变化(a) 第1类误差模型; (b) 第2类误差模型Fig. 1 Change of the modeled errors with the time step of data assimilation(a) The 1st error model; (b) The 2nd error model |
试验点位于北美大草原(40.01° N, 88.37° W), 土壤类型为粉砂质粘壤土, 下垫面为草地, 时间从1998年5月10日至8月8日。陆面模式的大气驱动数据、土壤和植被参数值来源于观测, 而土壤湿度的真实值是这样指定的:首先将陆面模式在同一观测数据驱动下“ spin-up” 3年, 达到某种动态平衡, 最后得出的土壤湿度模拟值作为真实值。试验中使用40个样本集合, 同时为了避免样本过快收敛, 同化试验中对初始土壤湿度、植被参数、大气驱动数据在参考值的基础上加上或乘上指定时空分布的扰动[11], 具体扰动详见表1。
| 表1 同化试验扰动方案设置 Table 1 Setup of perturbations in the data assimilation experiments |
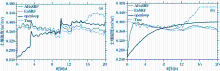
由于模式4层结果形式相似, 故以土壤第1层和第4层为例进行分析, 图2给出误差模型参量η 0=w=0.1、观测误差标准差等于0.01 cm3/cm3(观测误差标准差的单位相同, 下文省略)时EnSRF和AEnSRF估算的土壤湿度随同化时间的变化, 同化频率为每6小时/次。作为对比, 图中也给出土壤湿度真实值(True)以及模式有误差但未同化观测的集合预报值(openloop), 试验20天之后, 样本收敛, 所以图中仅给出同化前20天结果(下同)。
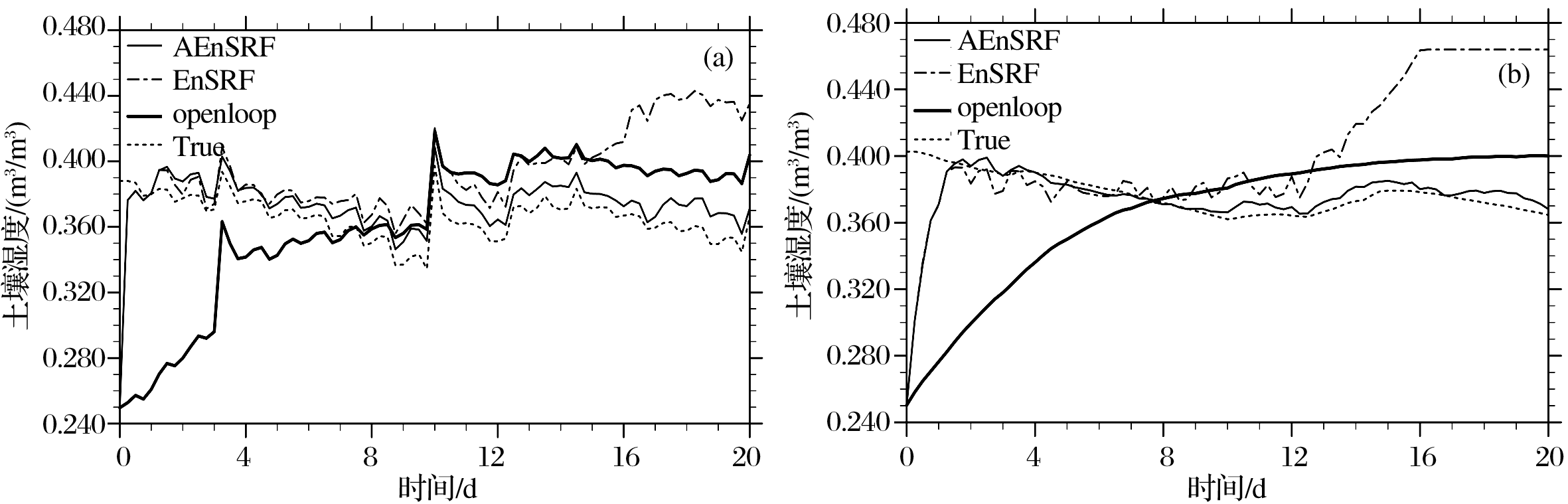 | 图2 不同方法得出的土壤湿度随同化时间的变化(a)第1层; (b)第4层Fig. 2 Change of the soil moisture estimates with time from different methods(a) The 1st layer; (b) The 4th layer |
首先看openloop, 了解在没有进行数据同化时初始场误差和模式误差对分析场的影响, openloop试验除了没有进行同化观测资料之外, 其他设置跟EnSRF以及AEnSRF设置完全一样。试验中土壤湿度初值是低估的(即存在负的初始误差), 前8天左右, 土壤湿度逐渐向真值逼近(原因是模式误差始终为正值), 之后向饱和土壤湿度靠近, 严重偏离真值, 预报失败。由于浅层对强迫场的响应要比深层敏感, 因此第1层土壤湿度呈现出与强迫场一致的波动性, 而深层的要明显低很多。
其次, 分析有初始场误差和模式误差时(误差设置与openloop完全一样)EnSRF的同化效果。按照Kalnay[23]的解释:一个好的集合样本应该保证样本离散度包含均值相对真值的误差。同化初期, 集合样本离散度能够包含均值误差, 同化对观测资料的吸收较多(土壤初始扰动的影响, 下同, 后文不再赘述), 加之误差累计不是很明显, 分析值迅速接近真值, 之后一段时间基本维持在真值附近, 但是随着模式误差逐渐积累, 集合样本逐渐收敛到饱和值, 样本离散度急剧减小, 已不能反映实际的样本均值误差, 大约在8天后无法有效同化观测资料[7, 24], EnSRF同化失败。
最后, 分析AEnSRF(即在同化更新土壤湿度廓线时同步订正模式偏差)的同化效果, 其中所有误差设置与前2组试验完全一致。试验结果表明:由于AEnSRF方法对模式误差进行了订正, 和EnSRF方法相比, 能够更明显降低模式偏差对土壤湿度估算的影响, 同化效果非常明显。
通过上述3组对比试验可知, 在模式误差较大时, 无论是集合预报, 还是不考虑模式误差的EnSRF同化试验都是失败的, 而采用状态增广的AEnSRF同化方案则能取得较好同化效果。
上述试验结果是在一系列固定参量取值下得出的, 为了全面了解AEnSRF方案的同化性能, 下面分别针对2类误差模型, 开展观测误差大小、同化时间间隔以及误差模型中参量不同取值(即模式误差形式和大小不同)对分析场影响的敏感性试验, 以探究AEnSRF同化方案的适用条件, 并进行相关讨论。
4.2.1 第1类误差模型下的敏感性试验结果
首先, 考察误差模型中w取值大小对估算值的影响, w值越大, 即误差模型每一步添加的模式偏差越大。试验中观测误差取0.01, 同化时间间隔为6小时。w=0.0时, 即不存在系统性模式偏差, EnSRF能取得很好同化结果, 但随着每一步添加的模式偏差增大(如w取0.05), 误差随时间积累趋于明显, EnSRF分析场变差, 且添加的模式偏差越大(如w取0.1), 分析场变差越明显。与此相反, 对上面3组w取值, AEnSRF得出的分析值均接近真值。总的来说, EnSRF对模式系统性偏差较敏感, 而AEnSRF则可以有效减轻模式偏差随时间的积累, 降低其对分析场的不利影响。
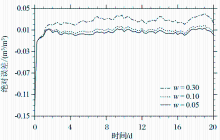
下面具体分析不同模式偏差大小对AEnSRF同化结果的影响, 试验中观测误差取0.01(不同观测误差的同化试验见后文)。由于4层结果相似, 仅以第1层为例做相关分析。从图3可以看出, 同化初期, 经过几次同化后, 估算值误差就快速降低, 但随模式向前运行, 不同大小模式偏差的影响就区分开来:若每一步添加的模式偏差较小(如w=0.05), AEnSRF估算值较准确; 随着添加的模式偏差增大(如w=0.1), 估算值误差开始增大; 当模式偏差继续增大(如w=0.3), 分析值误差亦进一步增大, 出现明显的高估。对应3组w取值, 同化时段内土壤湿度的均方根误差分别为0.0068, 0.0102, 0.0266。总之, AEnSRF同化方案能有效降低第一类模式偏差对估算值的不利影响, 在集合样本离散度一定的情况下, 随着模式偏差增大, 同化效果会变差。
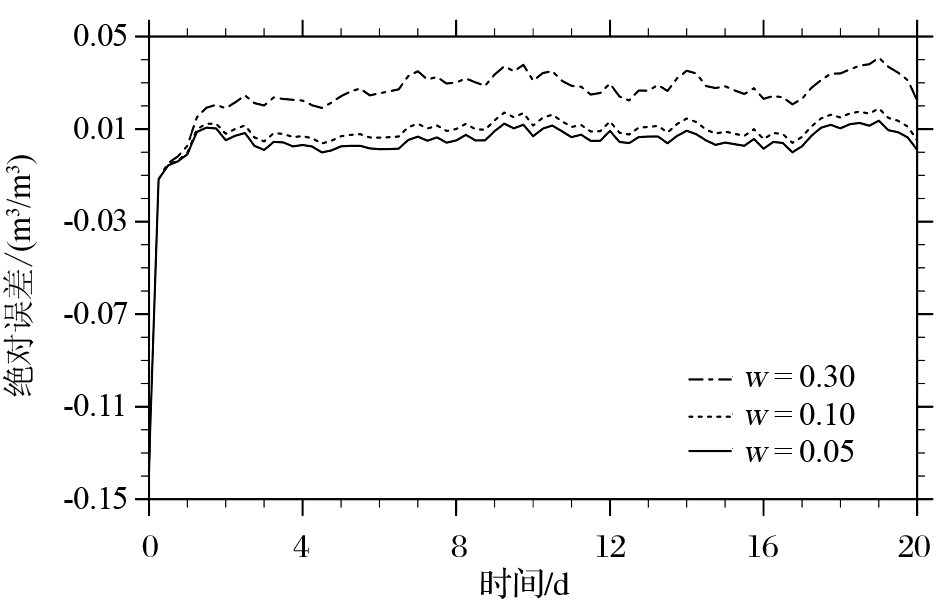 | 图3 不同w取值时第1层土壤湿度估算值的绝对误差随同化时间变化Fig. 3 Change of absolute errors of the 1st layer soil moisture estimates with time from different values of w |
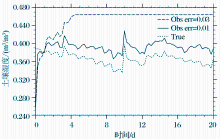
其次, 考察观测误差对AEnSRF估算土壤湿度的影响。图4给出每一步添加的模式偏差很大(对应w=0.3), 观测误差分别等于0.01和0.03时, AEnSRF估算的第1层土壤湿度随同化时间的变化, 同时表2给出整个同化时段内4层土壤湿度的均方根误差。可以看出:观测误差取0.01时, 估算结果与真值的变化趋势符合较好, 不过由于模式误差为较大正偏差, 估算值始终大于真值; 当观测误差取0.03时, 除同化初期几个时刻外, 其他时刻土壤湿度估算值远离真值, 接近土壤湿度饱和值且不随同化进行而改变, 同化失效。原因是:当模式偏差很大时, 模式预报的样本自然变差, 加之观测误差也很大, 观测资料的质量也随之变坏, 这样两方面都不能提供有效的土壤湿度变化信息, 误差随同化进行迅速累积, 最后只是由于土壤湿度不能大于饱和值的物理约束, 分析值才被迫停留在饱和值处。
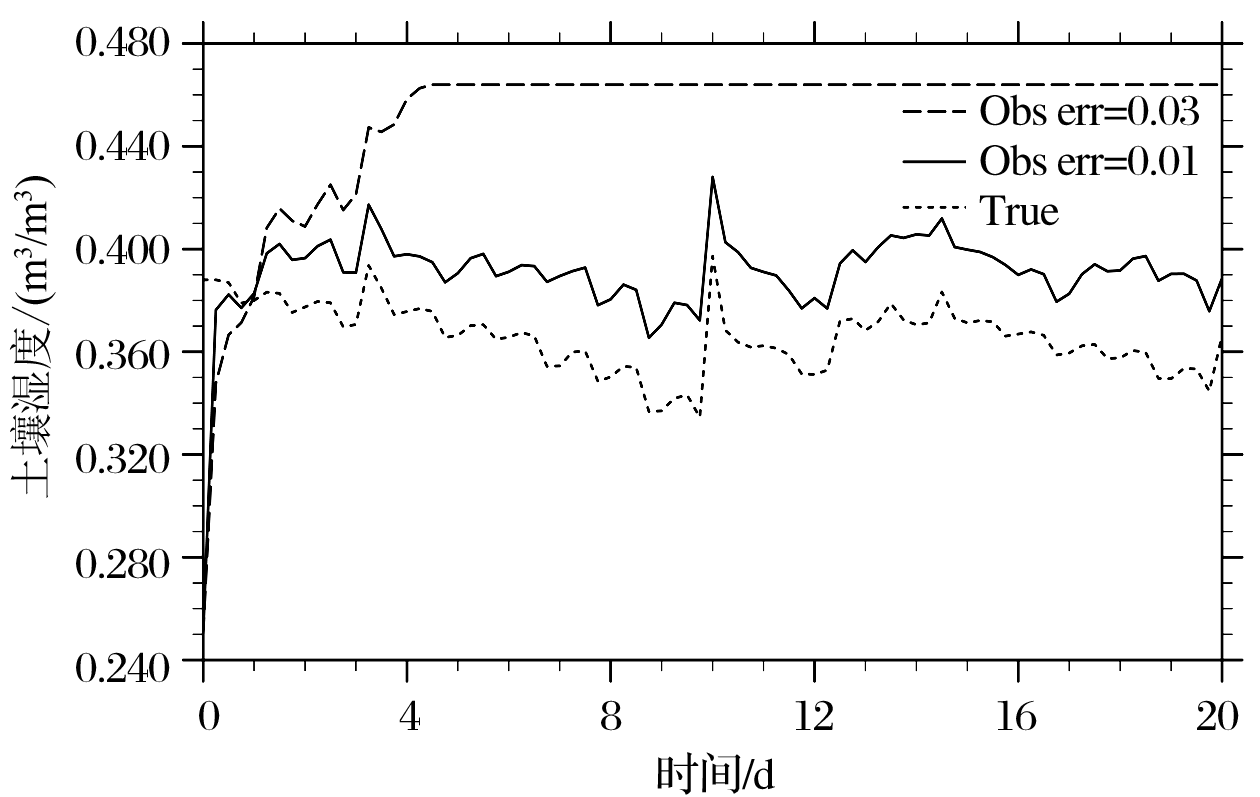 | 图4 不同观测误差时估算的第1层土壤湿度随时间变化Fig. 4 The temporal change of the 1st layer soil moisture estimates with different observational errors |
| 表2 整个同化时段(90天)内不同观测误差下4层土壤湿度均方根误差 Table 2 Root mean squared errors of 4-layer soil moisture estimates with different observational errors during the whole assimilation period (90 days) |
最后, 考察同化时间间隔对同化结果的影响, 试验选取6小时和24小时两种情形。当模式偏差很小(如w接近零)时, 样本统计得到的背景场误差协方差接近真实情况, EnSRF已经能满足要求, 24小时同化一次观测就能取得很好的结果。但随着模式偏差的增大, 伴随同化进行, 误差积累明显加快, 如果采用EnSRF方法, 则需要减小同化时间间隔, 但效果仍不好; 当模式偏差进一步增大, 这时即使增加同化频次, 分析场也不能明显改善。
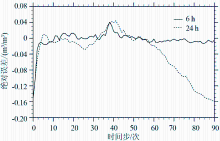
对AEnSRF同化方案, 当模式系统性偏差不是很大时, 采用6小时和24小时两种同化时间间隔, 二者分析场没有明显差别, 但是当模式偏差进一步增大, 24小时同化间隔已不能满足要求, 必须提高同化频率。由第1类误差模型的特点可知:前3层模式误差的积累效应要弱于第4层 (图1), 加之AEnSRF方法对模式偏差进行了有效订正, 在观测资料很准确的情况下(如观测误差等于0.01), 同化时间间隔对前3层的影响较小, 第4层由于远离观测且误差累积效应大于前3层, 因而同化频率对第4层影响更大, 故下面以第4层为例, 具体分析每一步添加的模式偏差很大时(对应w=0.3)估算值的误差变化(图5), 同时表3给出整个同化时段内不同同化时间间隔下土壤湿度的均方根误差。由于第1类误差模型前期误差较小, 加之采用状态增广技术对模式偏差进行了订正, 抑制了误差的快速积累, 所以在同化前60次, 两种同化时间间隔的估算值差别较小, 但60次后, 模式误差增大, 6小时同化间隔要明显优于24小时, 究其原因, 这主要是因为第1类误差模型到了后期, 误差积累趋于明显, 集合样本变差, 对观测资料的吸收变少, 出现滤波发散, 此时如若缩短同化时间间隔, 就能够减缓误差累积, 改善分析场。
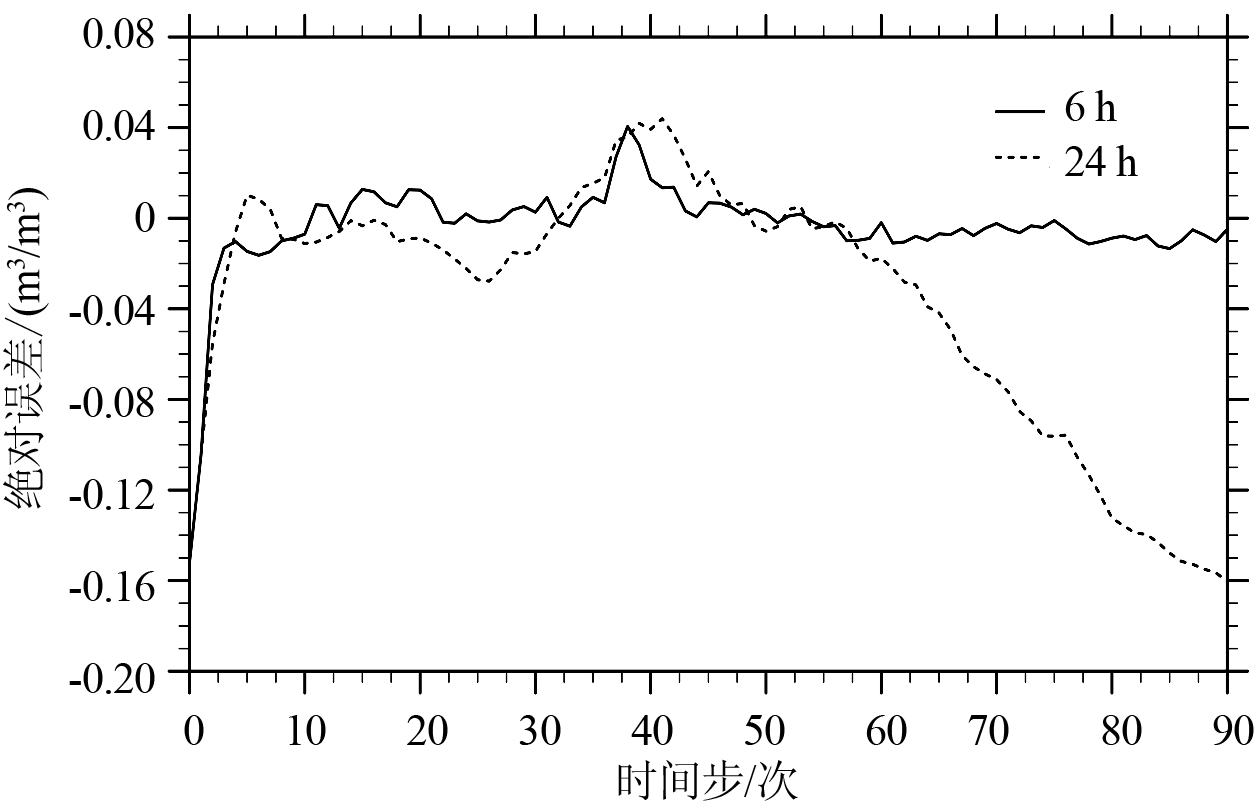 | 图5 不同同化时间间隔估算的第4层土壤湿度误差随更新步数的变化Fig. 5 The temporal change of absolute errors of the 4th soil moisture estimates with the updating steps by using different time intervals |
| 表3 整个同化时段(90次)内不同同化时间间隔下4层土壤湿度均方根误差 Table 3 Root mean squared errors of 4-layer soil moisture with different time intervals during the whole assimilation period(90 times) |
4.2.2 第2类误差模型下的敏感性试验结果
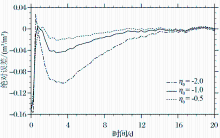
首先, 考察误差模型中参量初值η 0对AEnSRF同化结果的影响, η 0越大, 即初始模式偏差越大。试验中η 0分别取-0.5, -1.0, -2.0, 观测误差等于0.01, 同化时间间隔为6小时, 图6以第4层为例给出估算值的误差变化。同化初期只需几步更新, 估算值就很快接近真值, 但是随着同化进行, 模式偏差开始起作用, 其中0.5到2天左右, 模式偏差的负效应(η 0为负值)大于同化观测的正效应, 估算值变差; 第2到3天, 二者基本达到平衡; 随着时间推移, 模式偏差逐渐减小, 大约第3天之后, 同化观测的正效应开始大于模式偏差的负效应, 估算值逐渐向真值靠近, 最终都收敛到真值附近。这期间可以明显看出不同η 0取值的影响, η 0越大, 收敛的速度越慢, 原因是初值η 0越大, 在离散度一定的情况下, 样本离散度和样本均值误差的比值就越小, 同化对观测资料的吸收就越少, 需要更长时间的同化才能收敛到真值。当然, 也可通过增大样本离散度提高对观测资料的吸收, 进而加快收敛速度。
其次, 分析观测误差对AEnSRF同化结果的影响。试验中取η 0=-2.0, 观测误差分别选取0.01和0.03。结果表明:在误差模型初值一定的情况下, 观测误差越小, 分析值接近真值的速度也越快。因为在误差模型初值及离散度一定的情况下, 提高观测资料的精度不仅同化资料更加准确, 而且能增大卡尔曼增益值, 增加同化对观测的提取能力。
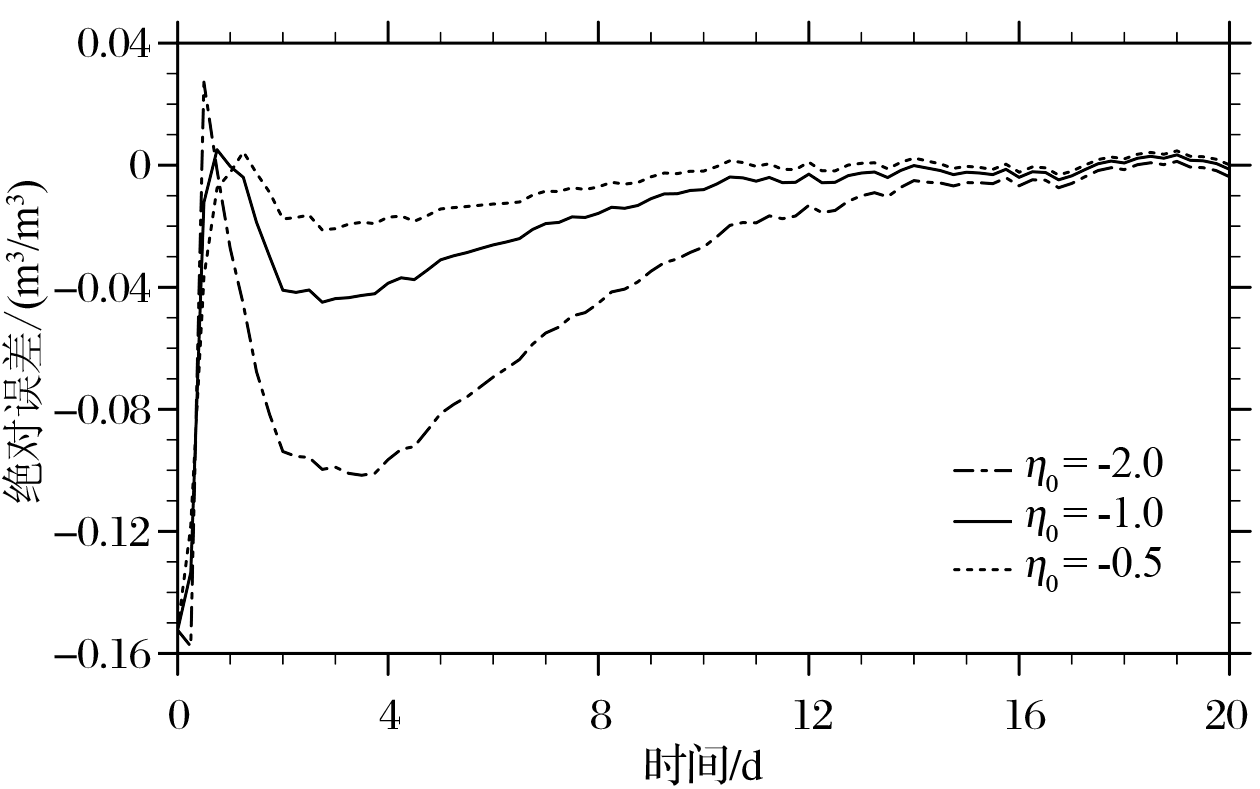 | 图6 η 0取不同值时估算的第4层土壤湿度绝对误差间的比较Fig.6 Comparison of absolute errors of the 4th layer soil moisture estimatesby using different values of η 0 |
为了更清楚地区别在相同的较大观测误差(如0.03)下, 误差模型中参量η 0和w对分析场的不同影响, 对第1类误差模型取w=0.3, 对第2类误差模型取η 0=-2.0, 对比分析它们的分析场。由前面分析结果可知:第一种情况w=0.3时同化失效(见图4), 因为在第1类误差模型中误差在传播过程会存在积累, 使得模式预报的背景值随时间推进偏差越来越大, 这时候如果观测资料再不够准确(如观测误差等于0.03), 就很难对较大偏差的背景场进行有效更新, 分析场也就无法改善; 而第2种情况η 0=-2.0时则不会出现同化失效, 因为第2类误差模型的特点是误差随同化向前推进逐渐衰减, 最后趋向零, 因此模式误差对同化后期的影响较小。
最后, 考察同化时间间隔对AEnSRF同化结果的影响。同化时间间隔分别为6和24小时, 试验观测误差等于0.01。结果显示:在误差模型初值较小时, 同化时间间隔对分析场的影响很小, 而在误差模型初值比较大的时候(如η 0=-2.0), 在同化初期, 样本离散度不能包含样本均值误差, 二者比值较小, 同化对观测的吸收不足, 此时较短的同化时间间隔可以更快地消除模式误差对分析值的影响, 但到同化后期, 由于模式误差减小并逐渐趋于0, 二者区别很小, 这与第一类误差模型的试验结果明显不同。
本文在同化表层土壤湿度观测估算土壤湿度廓线的同化框架内, 借助EnSRF与状态增广技术相结合的同化方案同时更新状态变量和订正模式偏差, 探究模式时间关联误差对分析场的影响, 并针对2类误差模型, 分析初始误差和误差累积效应对分析场的不同影响, 以及分析场对观测误差大小和同化时间间隔的敏感性, 得出如下主要结果:在模式偏差较大时, 无论是集合预报场还是不考虑模式误差的EnSRF同化分析场都与真实场误差较大, 甚至在某些情形下EnSRF估算的土壤湿度不如集合预报值openloop, 而采用状态增广的AEnSRF同化方案却能有效降低模式偏差的不利影响。
针对模式误差存在累积的第1类误差模型, 若积累不是很凸出, AEnSRF订正效果非常理想, 但当积累凸出时, AEnSRF对偏差订正也会不充分。观测资料越准确, 分析结果越准确, 尤其是误差传播过程中积累凸出时, 准确的观测资料是试验取得较好结果的保证。当误差积累不明显时, 同化时间间隔对结果影响不大; 积累明显时, 较小同化时间间隔能够更及时订正模式偏差, 防止积累。
对于初始误差较大但随时间推进逐渐衰减的第2类误差模型的同化试验, 初始误差较小时, EnSRF即能取得理想效果, 不需要进行偏差订正; 初始误差较大时, EnSRF已不能满足要求, 必须要对模式偏差进行订正。初始误差越大, AEnSRF同化的分析精度也会越低。观测资料越准确, AEnSRF同化的分析结果越准确, 特别是当初始误差较大而样本离散度又不足时, 准确的观测资料是AEnSRF成功的关键。初始误差大时, 增加同化频次能明显改善分析结果。
总之, AEnSRF是一种在更新状态变量时同步订正时间关联误差的有效同化方案, 但本研究还有不足之处, 如假定时间关联误差模型为已知形式, 没有同时考虑误差模型初始误差和误差传播过程中的积累效应等, 而实际模式误差形式通常是未知的, 模式误差传播过程中既要考虑初始误差, 也要考虑误差传播过程中的累积效应, 加之观测误差也可能有偏, 因此如何在实际中运用该技术还值得深入探究。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|