
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
无人飞机在台风探测中的应用进展
[雷小途 ]
]
]
|
|


作者简介:雷小途(1968-),男,江西奉新人,研究员,主要从事台风理论及预报方法研究. E-mail: leixt@mail.typhoon.gov.cn
与有人飞机的台风探测不同,无人飞机(也称无人机)因其相对低的成本且无人员伤亡风险等优势,自1997年一款名为“气象侦察兵(Aerosonde)”投入台风探测试验以来,受到国际社会的广泛关注。随着无人机技术[JP2]的迅猛发展,无人机的飞行高度、有效荷载和续航能力等性能不断提高,更多的台风特种观测仪器被搭载,特别是2010年NASA使用高空长航时无人机“全球鹰(Global Hawk)”对大西洋5个飓风的飞行探测取得成功后,基于无人机平台建立高空下投探空和近地/水面飞行观测相结合的台风精细结构探测体系渐成趋势。目前我国尚未建立飞机探测台风的业务,严重制约了我国台风定位定强和台风数值预报精度的进一步提高。鉴于此,简要概述了境内外无人机在台风探测中的实践和发展趋势,旨在推进我国无人机探测台风的实践及其业务化体系的建设。
:Since the practice by using the “aerosonde” in mornitoring typhoon in 1997, the unmanned aerial vehicles (UAVs) have attracted widespread attention because of their riskfree casualty and relatively low cost advantages. With the rapid development of UAVs technology, and the continued improvement of payload and endurance capacities, more and more special observational instruments have been mounted on the UAVs. Particulary, since the “Global Hawk” was successfully used in the hurricane mornitoring experiment in 2010, the integrated and collaborative aircraft observations based on UAVs, including drop sounding and nearsurface flying, have become the trend. This paper briefly outlined the development of UAVs and their application to the detection of tropical cyclone, including the practice and trends. The aimes were to promote the practice of using the UAVs in tropical cyclone observation, and to improve its operational detection system development.
随着卫星和数值预报技术的发展, 近年来台风路径预报明显改进[1, 2]。然而, 台风强度的预报进展缓慢, 台风的狂风和暴雨的客观预报仍不具有明显的业务能力。究其原因, 台风移动主要受大尺度环境气流的引导, 只有当引导气流较弱时, 台风本身的非对称结构和下垫面特征等因素的作用才会显现, 而此时的台风往往移动较为缓慢, 因此实际的路径预报误差通常也并不大。而台风强度变化和风雨分布则主要受台风环流内的中尺度对流等结构特征变化的影响, 因此对台风内部结构特征的描述与台风强度和风雨分布的预报能力密切相关。
美国自1943年就进行了(有人)飞机穿越台风的探测, 所到之处的风、温、压、湿等探测资料, 对于台风内部中尺度结构特征的认识、台风的业务定位和定强及路径和强度预报能力的提高等均发挥了重要作用[3]。可惜“ 冷战” 结束后, 由于经费等原因, 美国自1987年便停止了对西北太平洋区域台风的“ 飞机探测” 作业。此后, 2003— 2012年我国台湾实施了代号为“ 追风计划” 的“ 侵台台风之飞机侦察及投落送观测实验(DOTSTAR)” , 对台湾附近(以东)的台风进行了为期10年的(有人)飞机探测台风的试验, 所获资料同化到数值模式后能较明显地改进台风路径的预报能力[4]。然而, “ 追风计划” 的飞机只在台风核心区域的外围飞, 未能获取台风内部, 特别是台风眼和云墙区域的观测资料, 因此对台风强度预报的贡献较为有限。
由于有人飞机探测台风成本太高, 大多数国家“ 玩” 不起。我国及亚洲等地国家, 冒险和科学献身精神不及美国, 如面对飞机探测台风的高风险, 飞行员和科学家上飞机前都写好遗书, 最多的一个科学家共写过90余封(私人通讯)。我国科学家也曾于2009年首次进行了有人飞机探测台风的科学试验, 但出于安全等原因, 飞行员并未完全按科学家设计的路线飞行, 而是在2个台风(“ 莫拉克” 和“ 天鹅” )之间的相对平静地带飞行并投下探空仪器。尽管如此, 事实证明, 这样的飞机探测资料仍然对台风路径和强度的数值预报非常有用[5]。
无人飞机(Unmanned Aerial Vehicles, UAVs)也称无人机(或无人航空器或遥控驾驶航空器), 通常是指无人驾驶的由无线电遥控设备控制, 或由预编程序操纵的非载人飞行器。无人机具有成本低、效费比高及昼夜可用等众多有人驾驶飞机所不具有的巨大优势, 用无人机替代有人飞机执行高风险作业任务, 已是当今国际航天领域的一个重要发展方面。而随着无人机技术的发展, 利用无人机进行台风探测也逐渐成为可能和趋势。本文简要概述了近年来无人机探测台风的主要进展, 旨在推动我国无人机探测台风的科学试验和可能的业务应用。
众所周知, 低空(近地/水面)气象观测对于台风边界层特征(特别是台风条件下的海— 气相互作用)及其机理的认识, 不可或缺, 并有助于台风数值模式边界层物理过程参数化的改进及模式性能的提高。同时, 鉴于有人驾驶飞机在低空(特别是在台风条件下)飞行的高风险性, 低空气象无人机因而受到广泛关注。
澳大利亚较早研发气象无人机, 代表机型是“ Aerosonde(航空探测器, 或称气象侦察兵)” 及其改进型“ MK-II” 和“ MK-III” 。该序列无人机由澳大利亚Aerosonde公司自1991年开始研发, 1997年“ Aerosonde” 投入使用, 1999年和2001年先后推出改进型“ MK-II” 和“ MK-III” 。“ MK-III” 翼展2.7 m、起飞重量13.6 kg(有效荷载2.2 kg)、升限5.5 km、能以110 km/h的速度巡航30 h, 且由全球定位系统自动导航。由于比较轻便, 该机可从车辆顶部发射(图1), 已被澳大利亚气象局、美国NOAA和NASA、日本和韩国气象厅、世界卫生组织等多个国家的科研部门和国际组织使用。
 | 图1 澳大利亚“ MK-III” 型无人机Fig.1 The unmanned aerial vehicle “ MK-III” of Australia |
美国为了降低有人飞机探测飓风(台风)的成本和低空飞行的风险, 在2001年实施的“ 对流与水汽科学试验(The Convection and Moisture Experiment, CAMEX-4)” 中, 于8月19日— 9月9日, 使用澳大利亚产的“ Aerosonde” 进行了无人机低空气象探测的尝试, 获取了近水面(约300 m)的温度、湿度和风速等气象资料, 可惜无人机并未飞入飓风环流[6~8]。同年, 我国台湾大学科学家也利用相同型号的“ Aerosonde” 无人机, 成功地飞入了“ 海燕(0121号)” 台风的环流圈内, 距台风中心最近仅150 km, 测得了气压、最大风速和温度等气象要素[8]。日本气象厅也于2001年, 以冲绳为基地, 使用螺旋桨式单发动机飞机(全长2 m, 续航能力约为3 000 km), 对“ 桃芝(0108号)” 台风实施了无人机的探测试验, 获取了台风中的风向、风速、湿度和温度等大量的观测数据。美国曾于2003年计划在太平洋地区(关岛、阿拉斯加、冲绳和韩国等地)部署15~20架能探测台风的气象无人机。
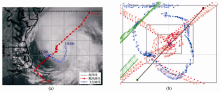
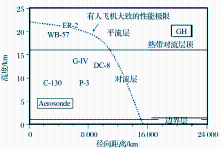
2005年9月16日, 在“ 改进热带气旋强度预报的试验(the Intensity Forecasting Experiment, IFEX)” 中, 美国用“ MK-III” 无人机首次成功地飞入了“ 奥菲莉亚(Ophelia)” 飓风(飞行路线如图2所示), 获取了飓风在近水面(约300 m)的风、温、压、湿等气象观测资料[8, 9]。2007年美国在对飓风“ 诺埃尔(Noel)” 进行了超低空飞行探测, 无人机的飞行高度仅为82 m, 并持续飞行了约17.5 h[9]。显然, 在这个高度实施有人驾驶飞机的飞行探测风险极大。
 | 图2 2005年9月16日飓风“ Ophelia” 的 GOES-12 可见光云图及17-19点飞行观测路径(左)及飓风中的观测风速(右)红:P-3, 蓝:无人机, 绿:浮标; 黑对角线:飓风在16日12时至17日00时的移动路径Fig.2 The GOES-12 visible image of hurricane “ Ophelia” in 16 Septmber 2005 and the flight path of UAV from 17-19UTC (left), and the wind mornitored by UAV (right)Red:P-3, Blue:UAV, Green:buoy, Black:track of hurricane from 12UTC of 16 to 00UTC of 17 September 2005 |
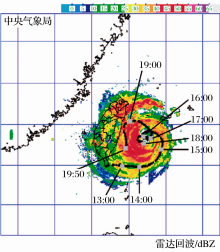
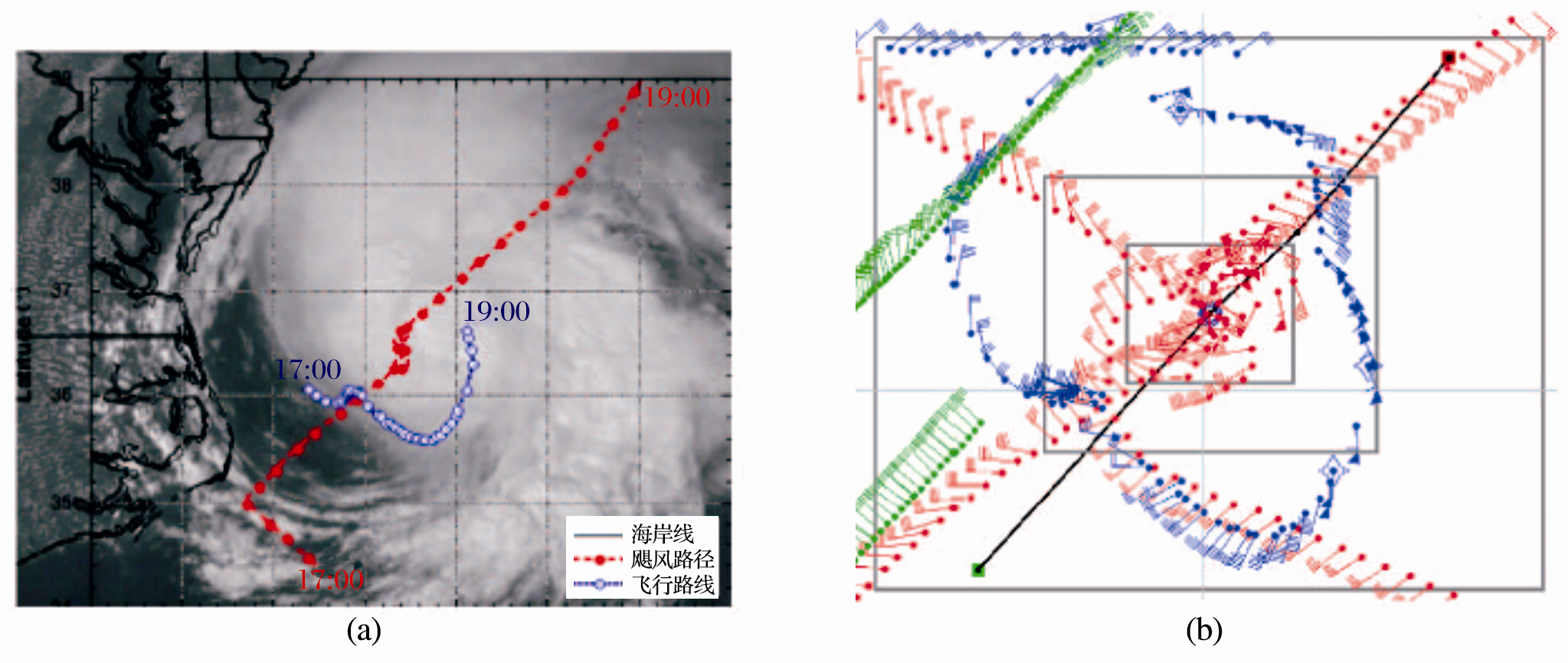
首例利用无人机成功穿越台风中心的飞行是由我国台湾科学家在2005年完成的。2005年10月1日, 我国台湾科学家利用澳大利亚产的“ MK-III” 无人机成功地穿越了“ 龙王(0519)” 的台风眼(图3), 在台风核心区域持续飞行了近10个小时, 并获取了飞行高度(3 km)处台风云墙内的最大风速等的观测资料, 测得的10 min和1 min平均风速分别达58.6 m/s和62 m/s[10, 11]。
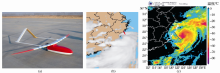
中国气象局(气象探测中心)于2008年组织国内首个无人机探测台风比较试验, 来自国内的“ 星光” 、“ 东恒宇” 、“ 西工大” 、“ 海鹰” 、“ 贝思” 和“ 恒利华” 等多家无人机研发机构和生产厂商参加。6月24~25日对“ 风神(0806号)” 台风进行了演练性的探测, 7月18日、9月15日分别对“ 海鸥(0807号)” 和“ 森拉克(0813号)” 台风进行了探测试验。在7月18日实施的“ 试验” 中, 由“ 东恒宇” 公司研制的“ 晨鸟” 无人机成功地飞入“ 海鸥” 台风(距台风中心最近约108 km), 并在台风环流内持续飞行了4小时(图4为“ 晨鸟” 无人飞机及其飞行路线), 获取了台风近水面(约500 m)的温度、气压、相对湿度、风速/风向及海拔高度等观测资料, 而且飞机安全回收。在整个试验中共完成了3次7小时的连续飞行测试、4小时大雨条件下飞行测试, 完成了对“ 海鸥” 和“ 森拉克” 台风的探测试验并获取了完整的温湿压、风速/风向资料[12]。
 | 图3 2005年10月1日16时龙王台风的雷达反射率及无人机穿越台风眼的轨迹图Fig.3 The radar reflectivity of typhoon Longwang at 16UTC 1 October 2005 and the UAV’ s flight path |
“ 晨鸟” 无人机是由“ 东恒宇” 公司研制生产的以“ Aerosonde” 类似的一款小型长航时气象探测无人机, 飞机长约1.75 m、高0.71 m、翼展长2.9 m、最大起飞重量15.5 kg、有效载荷(含载油)5 kg、升限5 km、最大平飞速度120 km/h(巡航速度95 km/h)、最大续航12~20小时、最大航程1 200~1 800 km, 采用车载发射、机腹滑降着陆、GPS导航和无线电及卫星(北斗或铱星)通信方式。在台风等复杂天气条件下的探测精度:温度< 0.3 ℃ (+50 ℃~-70 ℃)、湿度< 4%RH (1%RH~100%RH)、压力< 0.8hPa (1080~400 hPa)、风速< 2 m/s (风速> 5 m/s时)、风向< 5° (风速> 5 m/s时)。
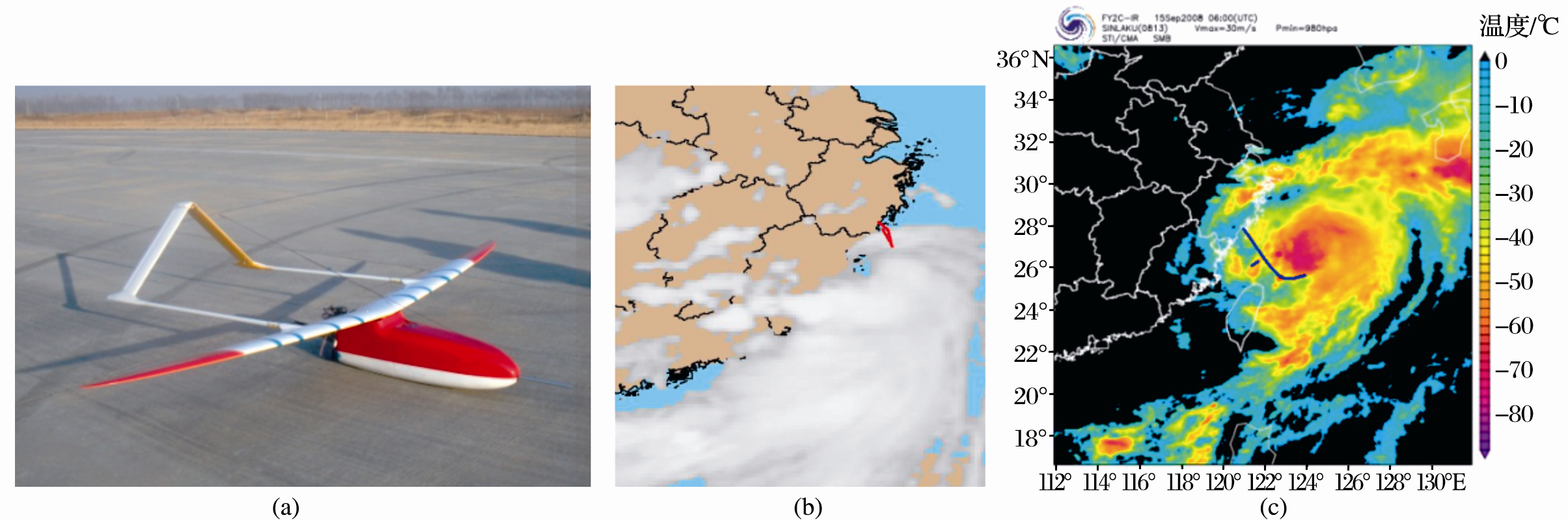 | 图4 中国“ 晨鸟” 无人机(左)及其对“ 海鸥” (中)和“ 森拉克” (右)台风探测的飞行轨迹Fig.4 The Chinese UAV “ Chenniao” (left) and its flight path during typhoon “ Kalmaegi” (middle) and “ Sinlaku” (right) |
台风环流内相关气象要素的垂直分布廓线, 对于台风结构的正确描述极为重要, 这也正是有人驾驶飞机穿越台风并进行下投探空的意义和价值之所在。早在1993年, Langford等[13]就探讨了用高空无人机下投探空仪开展飓风观测的可能性。随着军用无人机技术的发展, 如今“ 长航时无人侦察机” 的飞行升限已达18~20 km及以上、续航可达24小时以上, “ 对地攻击无人机” 也已具备作为空中运载工具、携带和自动投放下投探空的能力。
2009年, 美国国家航空航天局(NASA)获得了2架已不在空军服役的长航时高空“ 全球鹰” 无人侦空察机, 开始尝试使用“ 全球鹰” 无人机进行飓风探测等方面的研究, 并在随后获准使用“ 全球鹰” 无人机远程调度系统, 能从西海岸直飞大西洋的飓风(为节约航时, 探测台风的有人飞机都从东海岸起飞), 因此可实施更多的飓风飞行探测、获得更丰富飓风观测数据。
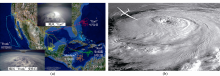
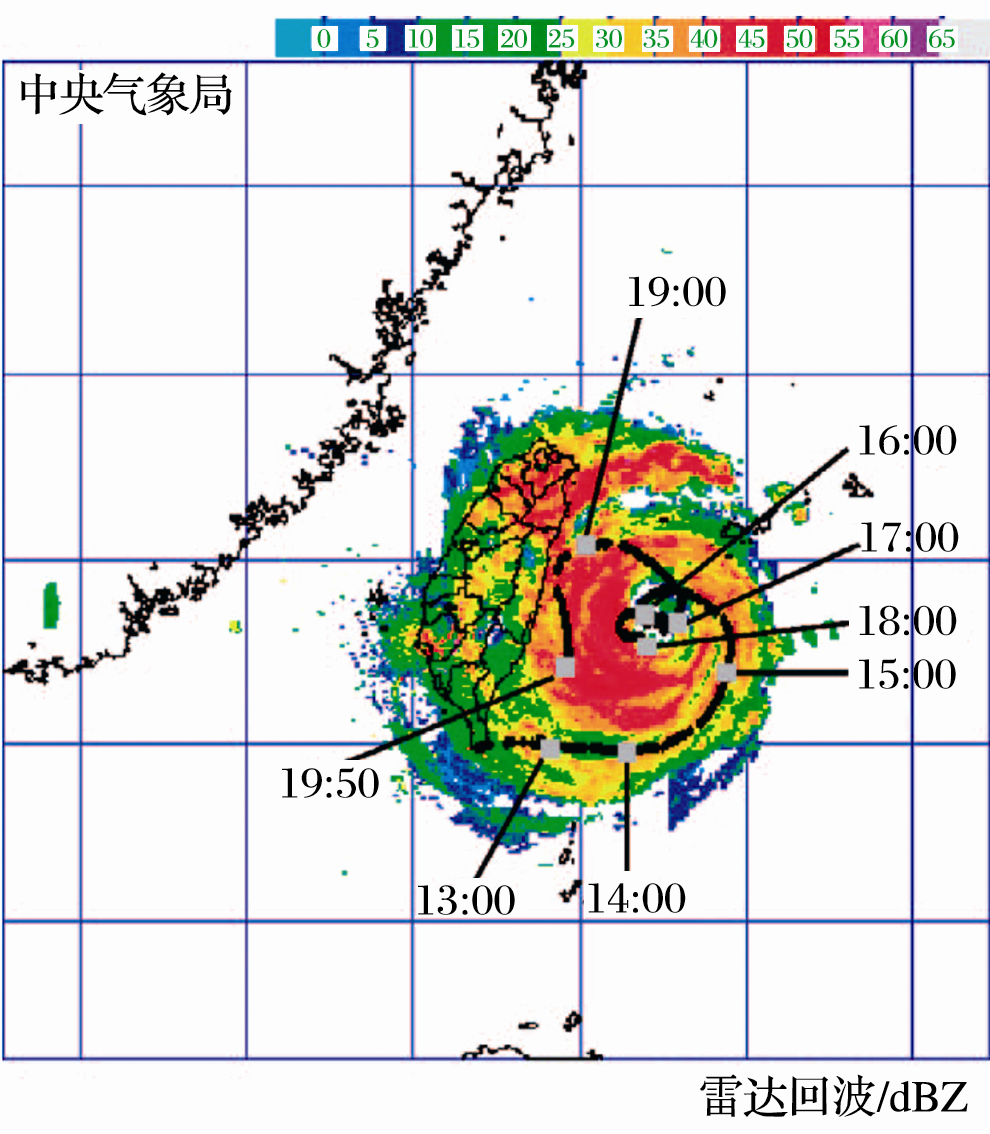
2010年在NASA实施的“ 飓风生成和快速增强过程(The Genesis and Rapid Intensification Processes, GRIP)科学试验” 中, 使用“ 全球鹰” 无人机对8~9月间的5个飓风(“ Frank” , “ Earl” , “ Pre-Karl” , “ Karl” 和“ Matthew” )进行了飞行探测(飞行路线如图5a所示), 记录到了飓风“ Karl” 在30小时内强度从23 m/s到56 m/s的快速增强等过程, 所获取的大量的飓风结构和环境场资料, 已用于对飓风形成和增强机理(特别是飓风内中尺度系统及来自非洲撒哈拉大沙漠的沙尘对大西洋飓风增强过程的影响)等的研究。其中, 8月28日对飓风“ Frank(弗兰克)” 的飞行是“ 全球鹰” 无人机首次被用于飓风探测, 无人机在飓风“ Frank” 中心的18km 上空(图5b)沿“ 东南— 西北” 方向来回共飞越了五次, 单程飞行约380 km, 测得了飓风的最大风速为97 km/h。
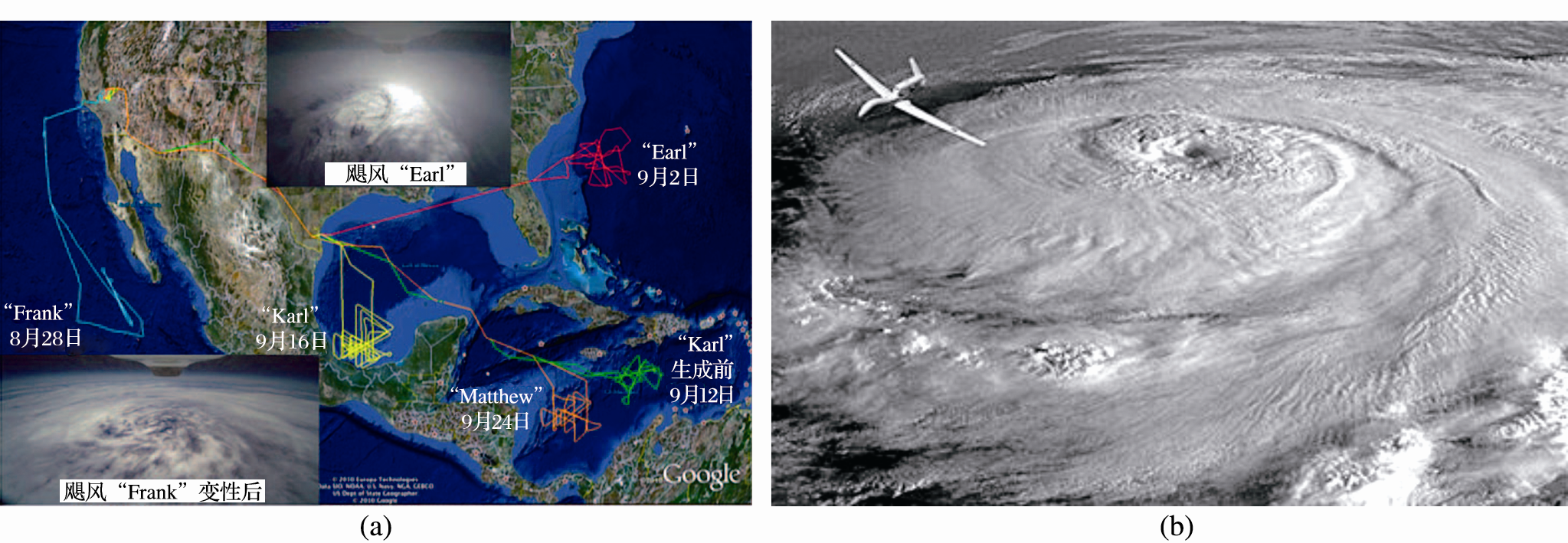 | 图5 2010年8~9月美国NASA利用“ 全球鹰” 无人机探测飓风(a)飞行路径; (b)探测“ 弗兰克” 飓风时无人机飞行在18 km高空Fig.5 The UAV “ Global Hawk” be used in hurricane monitoring by NASA in August-September 2010(a)Fight path; (b)The “ Global Hawk” at 18 km high altitude during monitoring “ Frank” hurricane |
2012年, NASA与NOAA及生产“ 全球鹰” 无人机的美国诺斯洛普· 格鲁门公司(全球第4大军工生产商)合作, 投资3 000万美元对空军2 架退役的“ 全球鹰” 无人机进行为期3年的改造, 使其成为更适用于飓风下投探空的长航时高空气象无人机。新机型被命名为“ 超强风暴哨兵(Hurricane and Severe Storm Sentinel, HS3)” , 设计机身13.4 m、翼展35.4 m、有效荷载680 kg、升限20 km以上(飞行高度16.7~19.8 km)、续航时间30小时以上、能连续飞行17 700 km, 除风、温、压、湿探测仪器外, 机上还安装有雷达、辐射计和探测云层结构、悬浮颗粒物或尘埃水平的激光测量仪等设备, 也包括下投探空仪系统。同年, NASA完成了“ 超强风暴哨兵(HS3)” 无人机探测飓风的首次试飞, 并在随后又实施了两次飓风探测试验。第一次试验是9月6日从位于加利福尼亚州爱德华兹空军基地的美国航天局德赖登飞行研究中心起飞, 携带了云物理激光雷达、扫描式高分辨率干涉仪和一个下投式探空仪系统, 完成对大西洋飓风“ 莱斯利” 的云层和降水等10小时以上的探测后, 于7日上午降落在瓦勒普斯发射场。第二次试验是9月19日从位于弗吉尼亚的惠洛浦航空基地起飞, 携带高空单片微波集成电路探通辐射计、飓风成像辐射计等设备, 进行了长达28小时的空中探测, 并成功穿越了飓风“ 纳丁” 的飓风眼(HS3无人机及其穿越飓风“ 纳丁” 的飞行路线如图6所示), 获取的观测资料用于了对热带风暴形成和大尺度环境场作用的研究[13]。
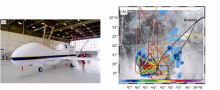
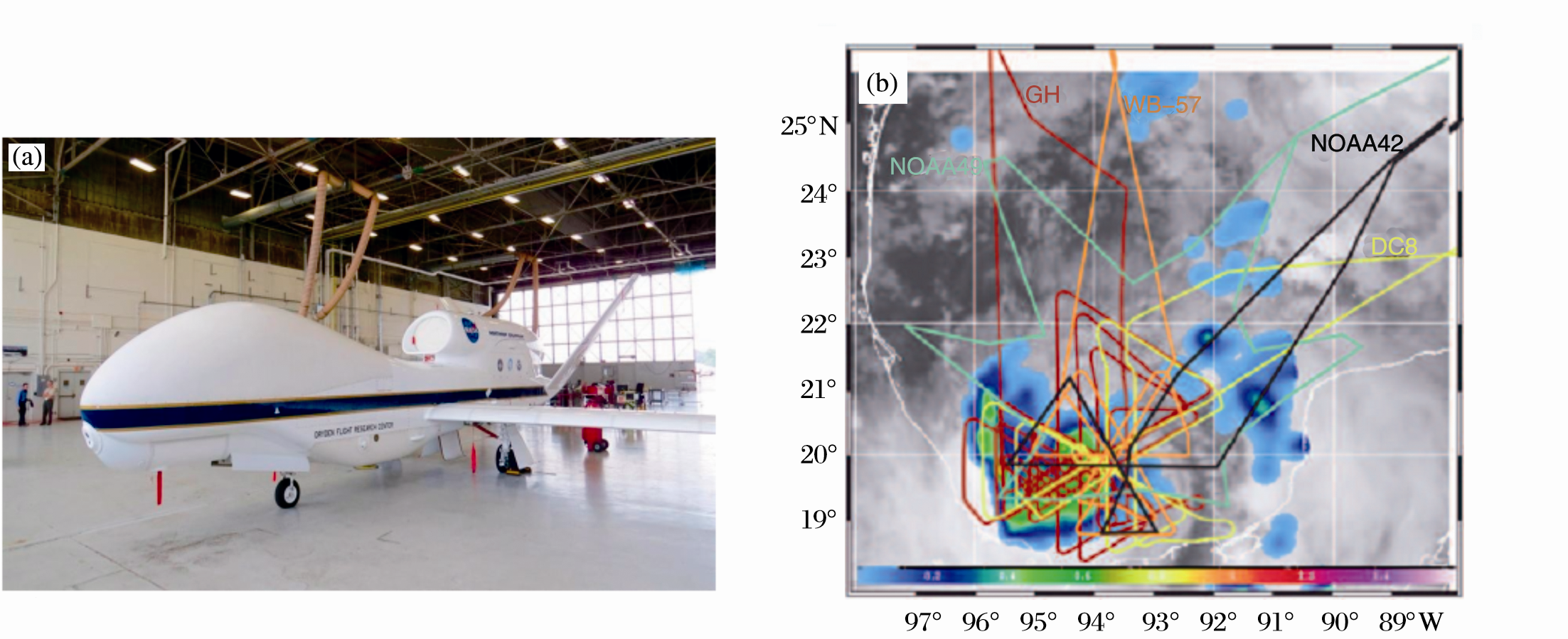 | 图6 在“ 全球鹰” 基础上改装的美国NASA“ 超强风暴哨兵(HS3)” 无人机(a)及其对穿越飓风眼的观测试验(b)GH:“ 全球鹰” /HS3; WB-57和DC-8是NASA的有人机; P-3和G-IV是NOAA的有人机Fig.6 The UAV “ HS3” of NASA (a) and the observating experiment of flight path pass through hurrican’ s eye (b)GH:Global hawk/HS3; WB-57 and DC-8:Manned aircraft of NASA; P-3 and G-IV:Manned aircraft of NOAA |
相对于路径, 台风强度变化的机理仍不很清楚, (数值)预报能力仍十分有限且进步缓慢。鉴于台风结构与强度变化的密切关系, 获取更多的台风全生命史的内部结构特征的直接观测资料, 被认为是提高台风生成和强度变化机制认识的必由之路, 也是改善台风数值模式涡旋初始化技术、海— 气模式耦合及台风边界层物理过程参数化等方案的重要基础。
美国长达半个多世纪的实践表明, 飞机观测无疑是当前台风直接观测最有效的手段。然而, 有人驾驶飞机穿越台风的观测成本太高、人员伤亡等的风险太大(特别是低空飞行时), 而无人机的相对低成本和无伤亡等优势较好地规避了有人飞机的风险。而且, 随着无人机技术的迅猛发展, 有效荷载和续航能力等性能还将进一步提高。对美国现役的用于探测台风的有人驾驶飞机和无人机的主要性能(图7)进行比较, 不难发现无人机的性能并不弱, 特别是在长航时(或航程)和低空飞行方面具有明显优势[14]。
从各国已开展的相关科学试验来看, 无人机探测台风大有可为。而且, 随着无人机技术的迅猛发展, 成本还将进一步降低, 有效荷载和续航能力等性能还将进一步提高, 更多的台风特种观测仪器将被搭载并充分使用, 高空下投探空和近水面飞行的无人机体系和协同观测已是大势所趋。
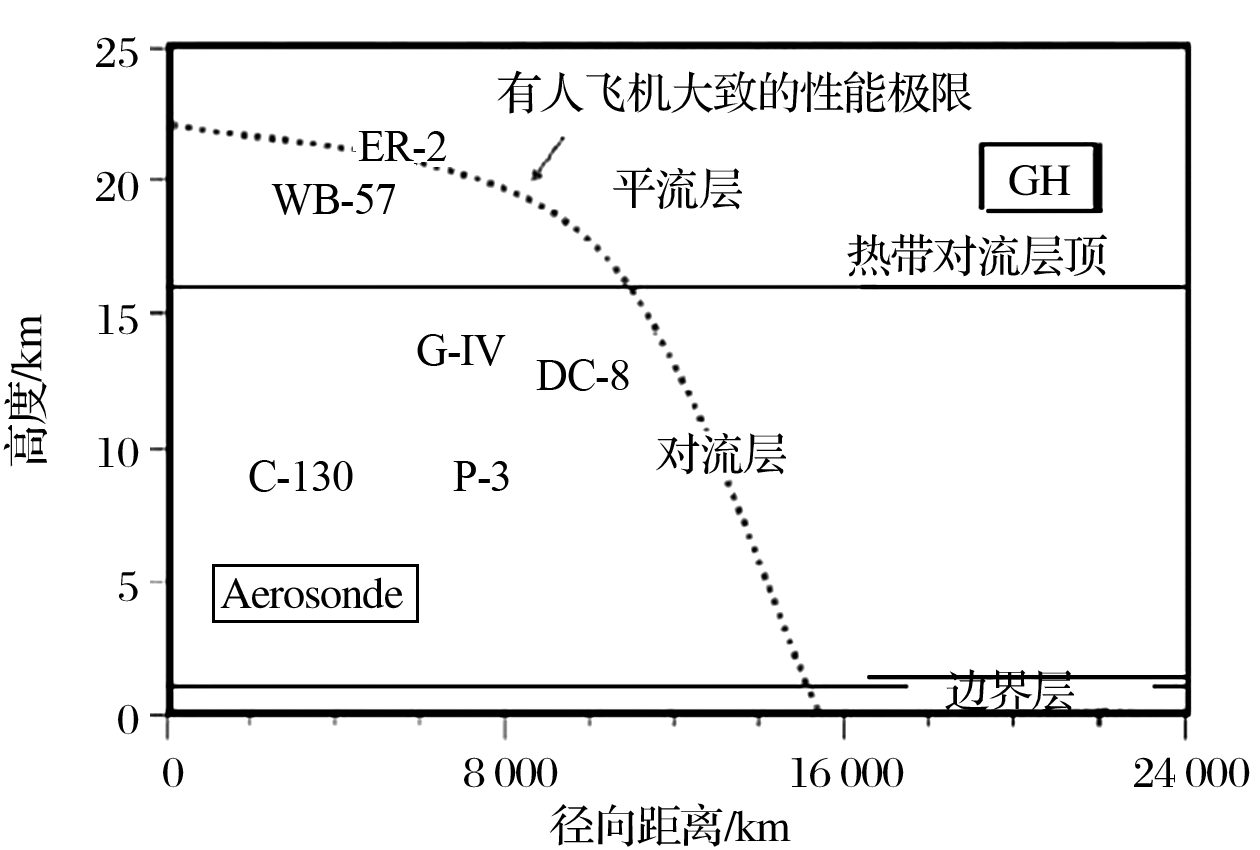 | 图7 美国现役探测台风的有人机(ER-2, WB-57, G-IV, DC-8, C-130, P-3)和无人机(GH, Aerosonde)的飞行高度及其航程示意图Fig. 7 The schematic diagram of altitude and flight of the operational manned typhoon mornitoring aircraft (ER-2, WB-57, G-IV, DC-8, C-130 and P-3) and UAV (GH, Aerosonde) in USA |
美国已初步形成了以“ Aerosonde” 进行低空(近水面)飞行和以“ 全球鹰(GH)” 及改装后的“ 超级风暴哨兵(HS3)” 进行高空下投探空载体的无人机探测台风体系。我国, 继2008年中国气象局(大气探测中心)利用“ 晨鸟” 进行台风条件下的低空飞行测试后, 中国气象局(上海台风研究所)将于2014年利用“ 鸥燕” (“ 晨鸟” 的升级机)实施穿越台风眼的低空(近水面)飞行试验, 并将搭载相关仪器近距离遥测台风条件下的海面风等要素, 为制定我国无人机低空业务化飞行探测的技术方案和流程奠定基础。近年来, 我国无人机技术发展迅速, 展望不久的将来, 中国气象局如与我国高空无人侦察机和多用途无人机生产厂商通力合作, 便能改装生产出我国的高空下投探空无人机, 从而建立起我国高低空相结合的无人机探测台风体系。
此外, 随着小微型无人机的发展, 类似于电影《龙卷风》中的“ 机群” 式的无人机探测台风技术也有望实现。最近, 美国佛罗里达大学的一个研究团队布设了一群6英尺长的无人机, 使用一台笔记本电脑将其送入飓风中并进行控制。由于这些无人机几乎不使用电力, 在风流和水流的裹挟下, 可以“ 充满” 整个飓风, 并收集与飓风有关的温度、气压、湿度和位置等有关的观测数据, 从而帮助科学家更好地理解飓风内部的风温湿等结构变化。
众所周知, “ 空域” 不仅与飞行器的空中飞行秩序和安全有关, 而且事关国家安全和主权, 因此世界各国的“ 空域” 均由其军方监管。随着无人机的大量涌现, 近年来无人机与有人机相撞的事件频频发生, 如2003年美军一架手掷式无人机撞上了一架A-10有人攻击机、2004年一架“ 大鸦” 无人机撞上了一架OH-58D军用直升机, 对现有以有人飞机为主的空中管制格局带来了新的挑战。与航线和飞行高空相对固定的民航业不同, 无人机的民用领域很广、航线和飞行高度通常不固定, 正因为如此, 现行的空域管理办法, 尚未开放民用无人机的空域, 已成为当前制约包括台风探测在内的无人机民用发展的主要瓶颈。
美国是最早构建无人机台风探测体系的国家, 也最早注意到空域开放对于保障无人机民用的必要性, 对无人机空中管制问题也非常重视, 在其联邦航空局和国防部下设有专门的无人机管理机构, 负责研究和制定有关无人机空域使用的政策和法规, 欧洲民航局也下设了类似的专门机构。欧洲早在2007年12月就发布了无人机与民航机共同使用空域的规定, 美国最近也制定了《无人飞行系统空域融合计划》, 并于2012年2月14日, 由美国总统奥巴马签署了《联邦航空管理局现代化改革条例》, 要求该局确立无人驾驶机的六级测试范围以及快捷通道的要求, 以便在2015年以前为无人机融入美国的航空事业开辟一条道路。
我国空军尚未对无人机的空中管制问题做出明确的规定。国家民航局于2009年6月颁布的民用无人机空中交通管理办法, 实行的是“ 单独为民用无人机飞行划定空域” 的办法。这较适用于无人机数量较少和飞行活动范围较小的情况, 而不太适用于大量的无人机, 特别是高空长航时无人机不断涌现的情况。因此, 我国也应当及早开展无人机空中管制问题的研究及相关法规的制定, 以适应无人机迅速发展和探测台风等的需求。
相对于台风的尺度, 无人机的飞行观测和下投探空等仍然是非常“ 有限” 的观测。研究表明, 不同区域(水平和垂直)、不同要素以及不同时间节点上的观测资料, 对于(数值模式)预报性能的贡献有时会显著的不同。Yamaguchi等[15]对“ DOTSTAR” 试验的飞机下投探空资料研究发现, 台风“ 康森(0404号)” 中心以东(绿色圈内)的3个下投探空资料, 对数值模式的台风路径预报至关重要, 而中心以西(青蓝色圈内)6个下投探空资料, 作用相对很小。
基于敏感性的目标观测, 是世界气象组织(WMO)为了提高观测的有效性从而改进天气预报性能, 组织实施的为期10年的“ 观测系统研究与可预报性试验(The Observing System Research and Predictability Experiment, THORPEX)” 的核心, 其实质就是在对预报性能提高“ 最敏感” 的地方(区域、时间和要素)实施“ 有限” 的观测。项目自实施以来, 取得了显著进展, 基于敏感性的目标观测的理念广为接受, 并已成为实施“ 有限” 观测、达到预报性能最大改进预期的基础[16]。
此外, 无人机的探测作为卫星、雷达和气象业务观测网的重要补充, 若能与近年来发展较快的近海浮标、梯度观测塔及车载追风观测等仪器协同使用, 将在台风观测研究和数值模式发展及防台减灾中发挥更大的作用。中国气象局(上海台风研究所)依托科技部公益性行业(气象)专项, 与相关部门合作, 于2014— 2018年组织实施“ 近海台风强度变化观测研究科学试验” , 低空无人飞机将与新近研制成功的“ 火箭抛撒” 下投探空及车载追风观测等设备协同观测。
20世纪60年代以后, 美国已逐步建立了“ 上有人造气象卫星, 中有飞机侦察, 下有气象雷达、浮标和船舶” 等组成的飓风立体探测网络, 为其飓风理论及数值模式等预报关键技术的研究提供了强有力的资料保障。与之相比较, 我国的地面气象探测网建设较快, 特别是地面自动气象站已非常密集(达3~5 km), FY气象卫星也具备6分钟区域加密观测能力, 沿岸的气象雷达也基本“ 全覆盖” , 不少地区已在“ 双雷达” 或“ 多雷达” 的描扫区内, 浮标和船舶的布设也逐渐加快, 唯有飞机探测进展缓慢。纵观世界各国无人机探测台风的实践, 展望其未来发展趋势, 建立我国“ 高低空无人机协同、火箭抛撒相结合” 的台风一体化探测体系的条件已基本成熟。
此外, 东海和南海周边国家甚多, 进行无人机或“ 火箭抛撒” 探测台风的作业时, 由于仪器或系统故障等原因, 客观上存在“ 越境” 或误入误伤等情况的风险。为规避此类不必要的国际纠纷和风险, 利用ESCAP/WMO亚太台风委员会等国际合作组织, 在试验阶段策划相应的国际合作项目, 不失为规避上述风险的较适宜的选择。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|