







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
EnKF同化的背景误差协方差矩阵局地化对比研究
[韩培 , 舒红, 许剑辉]
, 舒红, 许剑辉]
, 舒红, 许剑辉]
|
|


作者简介:韩培(1989-),女,湖北孝感人,硕士研究生,主要从事遥感数据同化研究. E-mail: 1129143892@qq.com
在集合数据同化中,背景场误差的协方差估计特别重要。通常有限个成员的集合在估计背景误差协方差矩阵时会引入伪相关,从而造成协方差被低估、滤波发散。虽然协方差膨胀的经验性方法能一定程度缓解协方差被低估的问题,但不能消除协方差的伪相关问题。因此,结合EnKF方案探讨2种消除伪相关的局地化方法(协方差局地化方法和局地分析方法),分析这2种局地化方法对背景误差协方差矩阵、增益矩阵、集合转换矩阵以及同化结果的影响。实验结果表明:局地化方法不仅能消除背景误差协方差矩阵的伪相关,还可以增加背景误差协方差矩阵的秩;在“弱”同化强度下,2种局地化方法的增益矩阵和集合转换矩阵相等;随着同化强度的增大,增益矩阵和集合转换矩阵的差异会变大;在不同的同化强度下,2种局地化方法各具特色,相对而言,协方差局地化方法在更新集合均值和集合扰动上具有较强的鲁棒性。研究结论有助于背景场误差协方差的精细分析和估计。
In ensemble data assimilation, the estimate of background error covariance is particuarly important. In general, the use of a finite ensemble size for estimating the background error covariance matrix easily introduces spurious correlations, which leads to the underestimation of covariance and filter divergence. Covariance inflation is an empirical method of correcting the underestimation of background error covariance, but it does not help to solve the problem of long-range spurious correlations. Therefore, based on the EnKF scheme, we explored two localization methods to eliminate the spurious correlations, which were the covariance localization method and the local analysis method. We analyzed their impacts on the background error covariance matrix, gain matrix, ensemble transform matrices and data assimilation results. The experimental results have been obtained. That is, the localization method not only can remove the spurious covariance in the background error covariance matrix, but also can increase the rank of the matrix. In a “weak” assimilation, the gain matrix and ensemble transform matrices of two methods are very close, but the differences of the gain matrix and ensemble transform matrices become more evident with the increase of assimilation strength. Under the different strength of assimilation, two localization methods have their own characteristics, and relatively the covariance localization method has stronger robustness on the update of ensemble mean and ensemble anomalies. This study is very helpful for the fine analysis and estimate of the background error covariance.
卡尔曼滤波(Kalman Filter, KF)是顺序同化算法的最早形式和理论基础, 在线性系统和高斯白噪声下能得到无偏最优估计, 但大气海洋预报模式多数是非线性系统, KF必须进行扩展才能适用[1]。1994年Evensen[2]在海洋资料同化过程中, 首次用到集合卡尔曼滤波(Ensemble Kalman Filter, EnKF)。它是集合预报和KF的有效结合, 利用集合来存储、传播、更新状态估计量和状态误差协方差, 克服了传统KF应用中的不足, 同时有效地降低了同化过程中的计算量, 被广泛应用于大规模数据同化系统, 并逐步与变分方法结合[3]。
在集合数据同化中, 将模型预测结果作为下一同化时刻的背景场时, 模型误差由背景场误差来表现, 误差的空间相关性由背景场误差的协方差矩阵(非对角阵)来表达。2个同化时刻之间的间隔时间比较短, 通常假设观测误差由误差的方差(对角阵形式的观测误差协方差矩阵)来表达, 观测误差通过背景场误差的协方差矩阵来传递空间相关信息到最终的同化分析结果中。因此, 背景场误差协方差的估计非常重要。然而, 有限个成员的集合在估计背景误差协方差矩阵时会引入伪相关[4], 即在物理上不相关或空间上距离较远的状态变量之间存在伪相关。随着同化过程的进行, 背景误差协方差被系统地低估, 观测数据的权重越来越小, 最终完全被忽视, 导致滤波发散[5]。这样估计得到的分析值不能准确地反映系统的真实状态。为了减少伪相关对同化过程的影响, 改善同化结果, 相关学者提出了协方差膨胀和局地化2种方法[6]。
协方差膨胀是由Anderson等[7]于1999年提出的, 用来修正背景误差协方差矩阵被低估的方法。其原理是利用一个膨胀因子r来增大背景误差协方差, 从而消除背景误差协方差被低估的现象。目前, r的选择都是经验性的。这种方式会打破系统的物理平衡, 不能消除远距离的伪相关[8]。因此, 引入背景误差协方差局地化方法的研究是非常必要的。在同化过程中, 局地化方法能够减少观测数据对空间区域的影响, 减少参与计算的集合大小。
目前, 广泛应用的局地化方法有2种, 即协方差局地化方法(Covariance Localization, CL)和局地分析方法(Local Analysis, LA)。虽然曾有学者研究过它们之间的关系, 但他们仅仅只考虑了2种方法对单个变量的影响[9]。这里我们不仅考察和分析2种局地化方法对背景误差协方差矩阵Pf、增益矩阵K和集合转换矩阵T的影响。此外, 还基于EnKF、EnSRF和DEnKF同化方案, 对比和分析这2种局地化方法对同化结果的影响。
KF更新方程如下:
式中:x是状态估计值, 上标f和a分别表示预测和分析, K是卡尔曼增益, d是观测向量, H是观测算子, P是状态误差协方差矩阵, I是单位矩阵, R是观测误差协方差矩阵, 上标T表示矩阵转置。在EnKF中, 状态估计值x和状态误差协方差矩阵P是用模型状态集合E表示:
式中:m为集合大小, E是包含所有集合成员的矩阵, 1是所有元素均为1的向量, A是集合扰动:
在EnKF中应用局地化有2个原因:空间伪相关和集合非满秩[10, 11]问题。在同化分析过程中, 它们会导致背景误差协方差减小过快、滤波发散。
CL是一种协方差滤波方法, 利用局地化半径来截断背景误差协方差矩阵中远距离的伪相关, 改善背景误差协方差矩阵的估计质量。常采用舒尔积[12], 即通过一个基于距离的相关系数矩阵ρ [6, 13]与背景误差协方差矩阵Pf作舒尔积, 来替代原有Pf, 如式(7):
Pf→ ρ 。Pf (7)
CL只适用以下方案, 如:传统EnKF、EnSRF(Ensemble Square Root Filter, EnSRF)[14]、DEnKF(Deterministic Ensemble Kalman Filter, DEnKF)[15], 而不适用于ETKF(Ensemble Transform Kalman Filter, ETKF)[16]。
与CL方法不同, LA方法适用任何独立方案, 原理是以待更新状态变量为中心, 建立一个虚拟局部窗口, 得到该状态变量背景误差协方差的局部近似值, 这等价于在更新过程中, 设定局部窗口外的集合扰动为零。在ETKF方案中, 第i个状态变量的局部更新过程如下:
在ETKF中, 卡尔曼增益
式中:上标i表示局部;
2.4.1 集合均值的更新
EnKF中, 第i个状态变量的更新方程如下:
上标圆括号表示渐变, 这取决于所选的方法, 对于CL有:
此时局部卡尔曼增益为:
将公式(15)与公式(11)比较, 可知:①在CL中, 矩阵求逆项[I+(Hρ HT)(SST)]-1R-1/2是全局的, LA中矩阵求逆项

2.4.2 集合扰动的更新
在EnSRF中, 集合扰动的更新如公式(16)和公式(17)所示:
由矩阵求逆引理[17], 得到T, 如公式(18):

尽管上述T的形式不同, 但是对于待更新变量行, 它们是一致的, 因为:
式中:p是观测数目; H是观测算子;
故:
将式(19)、(20)由泰勒级数展开, O(.)表示是佩亚诺余项:
CL:
LA:
结合式(22)可知:同化很“ 弱” 时, CL和LA的T近似相等, 但一般两者的T不相等。
线性平流(Linear Advection, LA)模型[18]具有一维周期性, 状态向量X维度为n, 如下:
状态样本xi是由nk个具有随机振幅和相位的正弦波组合而成, 如下:
rand()函数返回均匀分布的随机数, 且0≤ rand()≤ 1, exp()为e的指数函数。
3.2.1 基本参数
设定LA模型的状态变量数n=100, kω =kmax=10, nk=50。集合成员数m为21, 观测数目为45, 同化总步长为1 500, 同化间隔步长为5, 局地化半径Rloc为10, 不加任何说明时, 观测方差为0.1。实验中采用传播减小因子kσ 来评估同化强度[9], 其表达式如下:
当kσ -1≪1时, 同化强度定义为“ 弱” 同化, 即在更新状态变量的过程中, 观测信息占的权重远小于模型预测信息, 观测数据的贡献较小。当kσ -1≫1时, 同化强度定义为“ 强” 同化, 即在更新状态变量时, 观测信息占的权重远大于预测信息, 引入的观测信息较多。当kσ -1与1相差不大时, 同化强度定义为“ 中” 同化, 即观测信息和预测信息权重相当。另外, 实验采用集合均方根误差(RMSE)和集合传播(spread)来评估同化效果, EnKF同化过程和效果图如图1所示。
3.2.2 局地裁剪函数
局地裁剪函数是由高斯和科恩于1999年提出的[19], 其表达式如下:
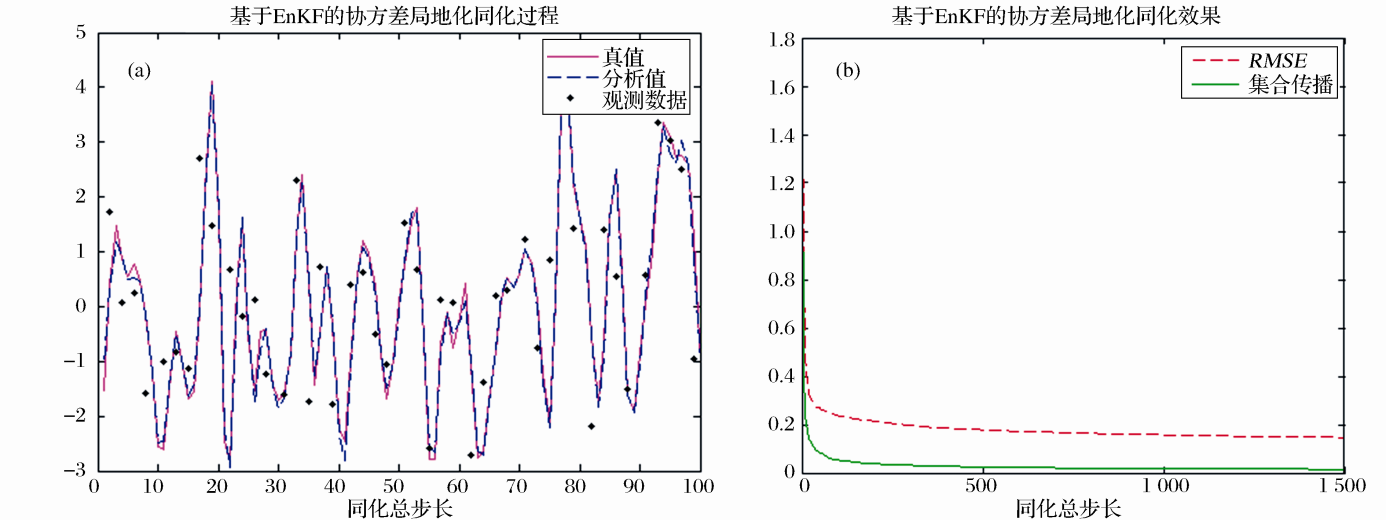 | 图1 EnKF同化过程和效果图Fig.1 The process and result of data assimilation based on EnKF |
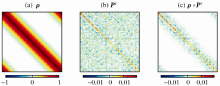
为了研究CL对背景误差协方差矩阵Pf的影响, 提取同化时刻t=50时的Pf和ρ 。Pf作比较, 结果如图2所示, 其中:图2(a)为状态变量之间的相关系数矩阵ρ , 图2(b)为舒尔积前的背景误差协方差矩阵Pf, 图2(c)为舒尔积后的背景误差协方差矩阵ρ 。Pf。
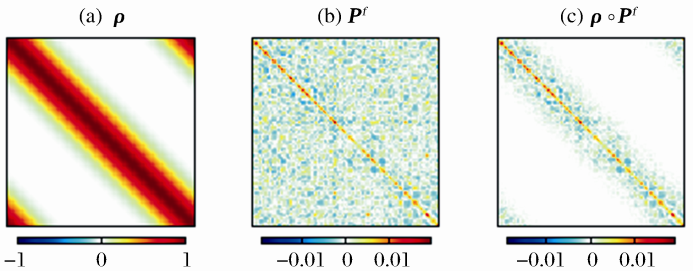 | 图2 CL对背景误差协方差矩阵Pf的影响色度条表示矩阵元素的取值范围Fig.2 CL’ s impact on the background error covariance matrix PfColorbar in figure 2 denotes the values range of matrix elements |
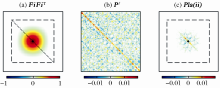
为了研究LA对背景误差协方差矩阵Pf的影响, 取同化时刻t=50, 第50个状态变量的误差协方差矩阵Pii和Pf作比较, 结果如图4所示。图4(a)是第50个状态变量的裁剪相关系数矩阵Fi, 图4(b)是LA作用前的Pf, 图4(c)是LA裁剪后的Pii, 记为Pla(ii), 图4(c)中的虚线框表示以第50个状态变量为中心的局部区域。
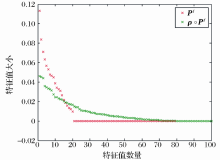
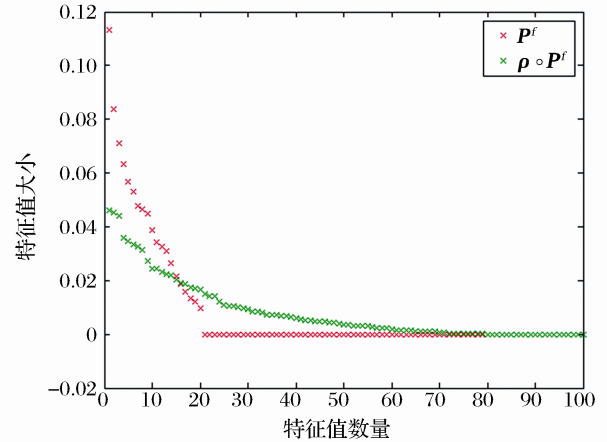 | 图 3 舒尔积前后背景误差协方差矩阵Pf的特征值光谱Fig.3 The eigenvalues spectrum of the background error covariance matrixPfbefore and after Schur Product |
| Pf (t = 50, i= 50) colorbar in figure 4 denotes the values range of matrix elements '>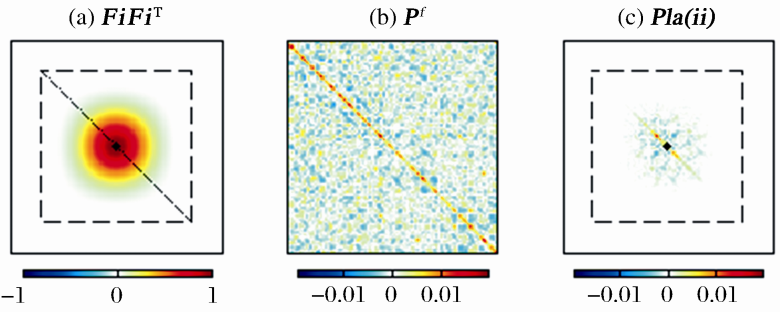 | 图4 LA对背景误差协方差矩阵Pf的影响(t=50, i=50)色度条表示矩阵元素的取值范围Fig.4 LA's impact on the background error covariance matrix Pf (t = 50, i= 50)colorbar in figure 4 denotes the values range of matrix elements |
由图4可知:① LA方法可以消除背景误差协方差矩阵Pf中的伪相关, 减少远距离观测数据对待更新状态变量的影响; ② 相对于CL方法, LA方法每次只更新局部区域中心点的协方差, 其他非中心元素的协方差并不更新, 即LA方法中Pf为异步更新, CL方法中Pf是同步更新。
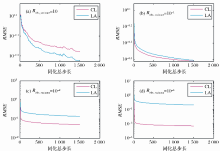
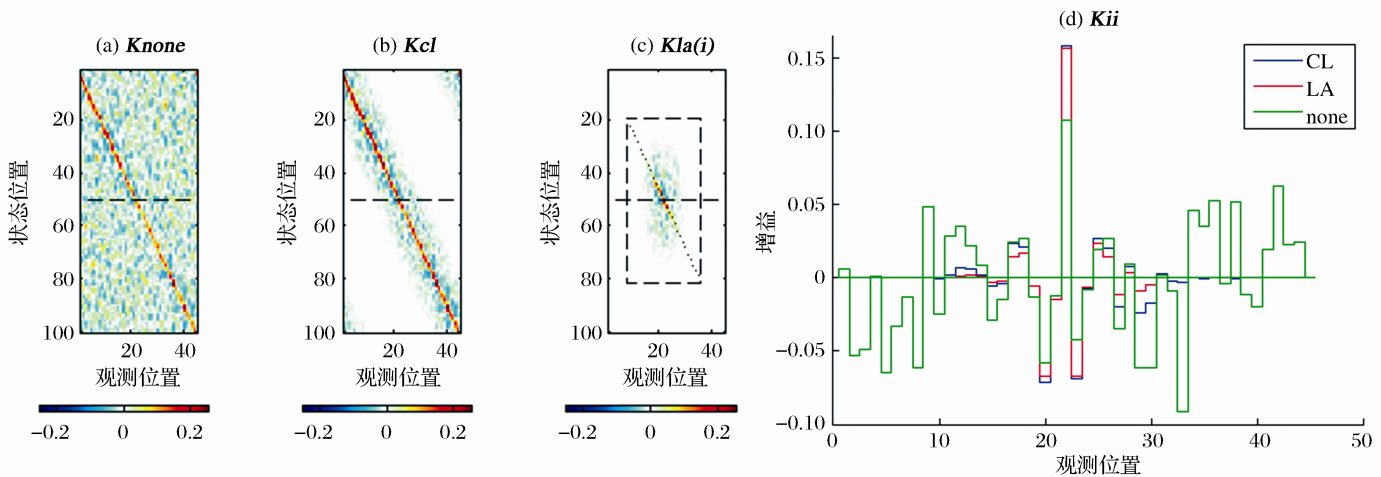
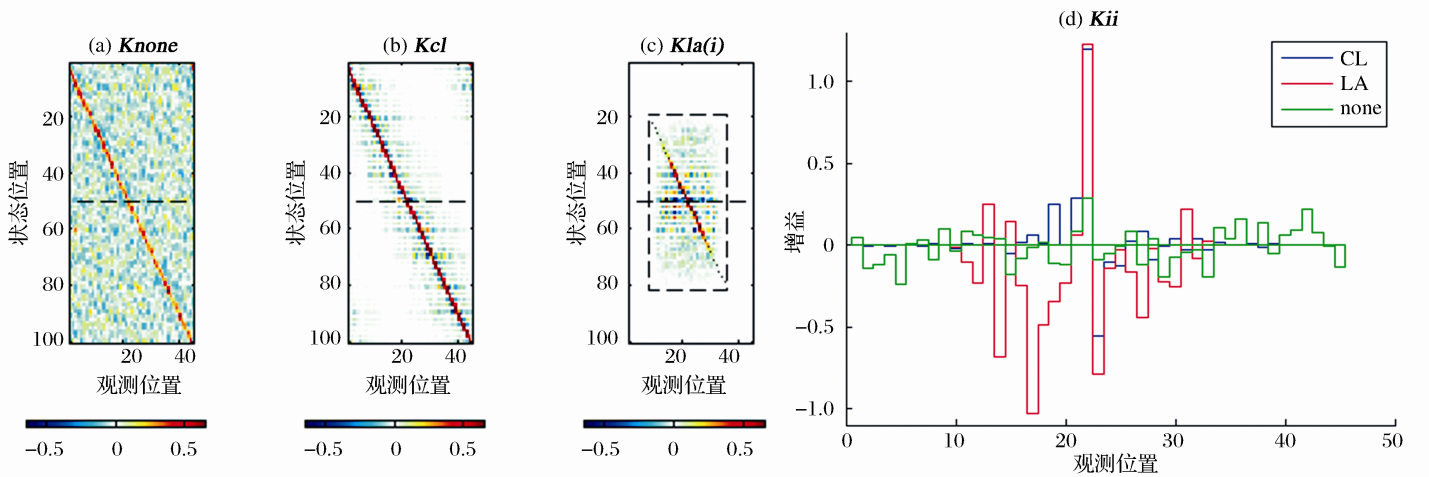
为了研究CL和LA对增益矩阵K的影响, 我们考察了观测误差方差Robs_variance分别为10、10-1和10-4这3种情形下EnKF的同化过程, 对应地分别提取同化时刻t=5时未局地化、CL和LA的增益矩阵来对比分析, 3种情形对应的结果分别如图5、6和7所示, 其中:图5(a)、图6(a)和图7(a)是未局地化的增益, 记为Knone; 图5(b)、图6(b)和图7(b)是CL的增益, 记为Kcl; 图5(c)、图6(c)和图7(c)是LA中第50个状态变量的局部增益, 记为Kla(i), 其中虚框表示以第50个状态变量为中心的局部区域; 图5(d)、图6(d)和图7(d)给出了未局地化、CL和LA 3种方法下, 第50个状态变量的增益, 记为Kii。
 | 图5 3种增益矩阵K对比图(Robs_variance= 10)色度条表示矩阵元素的取值范围Fig. 5 The contrast of three kinds of gain matrixK (Robs_variance = 10)Colorbar in figure 5 denotes the values range of matrix elements |
 | 图6 3种增益矩阵K对比图(Robs_variance= 10-1)色度条表示矩阵元素的取值范围Fig.6 The contrast of three kinds of gain matrix K (Robs_variance = 10-1)Colorbar in figure 6 denotes the values range of matrix elements |
当Robs_variance=10-1时, kσ -1≈ 4.4261, 同化强度对应为 “ 中” 同化。由图6可知:① 在“ 中” 同化下, CL的增益矩阵Kcl仍保持对角性, 而LA的局部增益矩阵Kla(i)在局部区域内呈松散状; ② 在“ 中” 同化下, CL和LA更新同一状态变量的增益Kii差异变大, 不像图5(d)中两者差异很小, 由此可知, 随着同化强度的增大, CL和LA的增益差异逐渐变大。
当Robs_variance=10-4时, kσ -1≈ 160.958, 同化强度对应为 “ 强” 同化。由图7可知:① 在“ 强” 同化下, CL的增益Kcl仍保持对角性, 但LA的局部增益Kla(i)在局部区域内丧失了对角性, 与图6(c)比较, Kla(i)变得更加松散, 甚至充满整个局部空间; ② 在“ 强” 同化下, CL和LA更新同一状态变量的增益Kii相差很大。
综上可知:① 随着同化强度的增大, CL的增益矩阵始终能保持对角性, 而LA的增益矩阵逐渐会丧失对角性, 因此, CL方法在更新集合均值上具有较强的鲁棒性; ② 在同化很“ 弱” 时, CL和LA的增益近似相等, 但随着同化强度的增大, CL和LA的增益差异变大。
由于EnKF的集合扰动更新没有应用到集合转换矩阵T, 这里我们考察观测误差方差Robs_variance分别为10、10-1和10-43种情形下EnSRF的同化过程, 对应地分别提取同化时刻t=5时未局地化、CL和LA的集合转换矩阵来比较分析, 3种情形对应的结果分别如图8、9和10所示, 其中:图8(a)、图9(a)和图10(a)是未局地化的集合转换矩阵与单位矩阵之差, 记为Tnone-I; 图8(b)、图9(b)和图10(b)是CL的集合转换矩阵与单位矩阵之差, 记为Tcl-I; 图8(c)、图9(c)和图10(c)是LA中第50个状态变量的局部集合转换矩阵与单位矩阵之差, 记为Tla(i)-I, 其中虚框表示以第50个状态变量为中心的局部区域; 图8(d)、图9(d)和图10(d)给出了未局地化、CL和LA 3种方法下, 第50个状态变量的转换矩阵, 记为T(i)。
 | 图7 3种增益矩阵K对比图(Robs_variance= 10-4)色度条表示矩阵元素的取值范围Fig.7 The contrast of three kinds of gain matrix K (Robs_variance = 10-4)Colorbar in figure 7 denotes the values range of matrix elements |
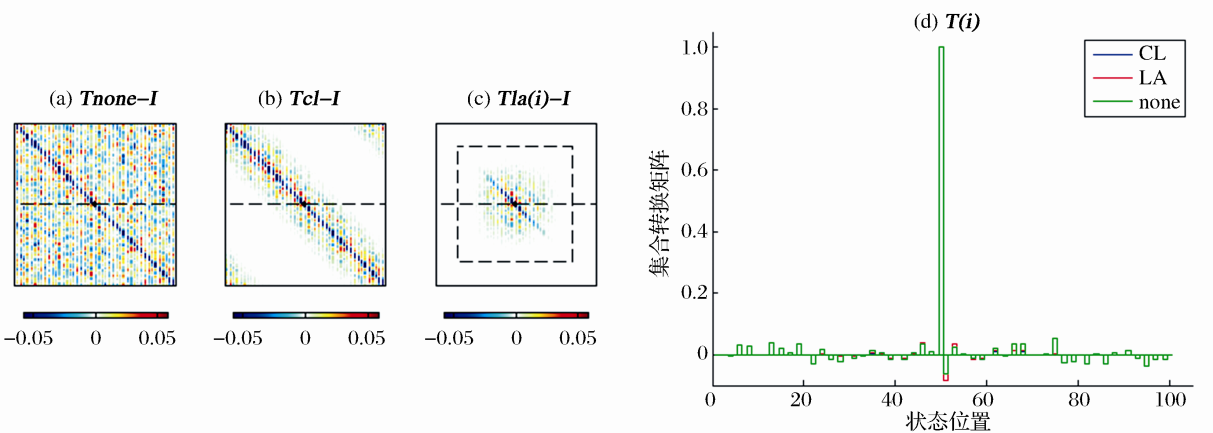 | 图8 集合转换矩阵T对比图(Robs_variance=10)色度条表示矩阵元素的取值范围Fig.8 The contrast of the ensemble transformation matrix T(Robs_variance= 10)Colorbar in figure 8 denotes the values range of matrix elements |
当Robs_variance=10时, kσ -1≈ 0.2023, 同化强度对应为 “ 弱” 同化。由图8可知:① 未局地化的集合转换矩阵保留了状态变量之间的伪相关, CL和LA消除了集合转换矩阵中远距离的伪相关, 并呈对角性和对称性, 对称性是由模型周期性引起; ② 与CL不同, LA每次只更新区域中心点的T, 其他非中心元素的T均不更新, 即LA中T为异步更新, CL中T为同步更新; ③ 在“ 弱” 同化下, CL和LA更新同一状态变量的转换矩阵T(i)近似相等, 此时两者转换矩阵的差异可忽略。
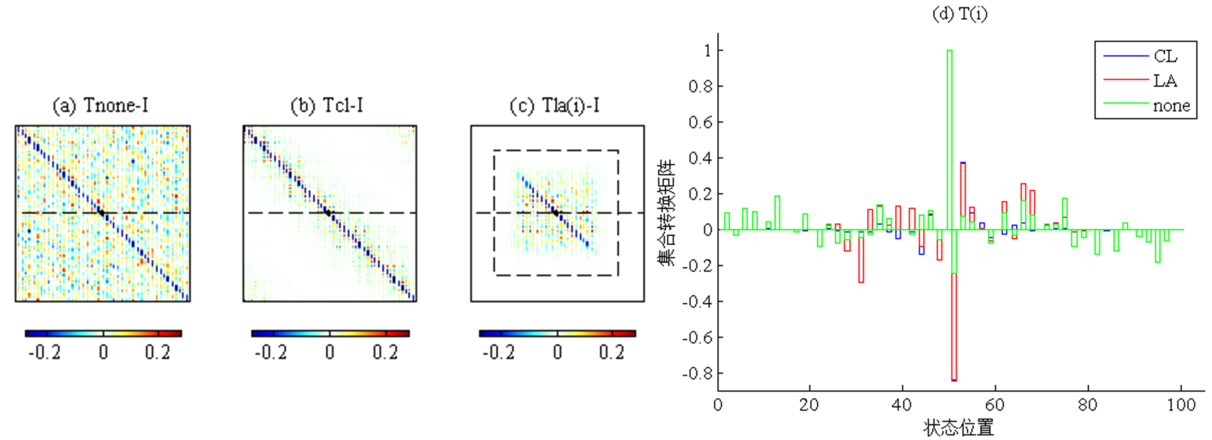 | 图9 集合转换矩阵T对比图(Robs_variance= 10-1)色度条表示矩阵元素的取值范围Fig.9 The contrast of the ensemble transformation matrix T(Robs_variance= 10-1)colorbar in figure 9 denotes the values range of matrix elements |
当Robs_variance=10-1时, kσ -1≈ 49931, 同化强度对应为 “ 中” 同化。由图9可知:① 在“ 中” 同化下, CL的转换矩阵Tcl仍保持对角性, 而LA的局部转换矩阵Tla(i)在局部区域内呈松散状; ② 在“ 中” 同化下, CL和LA更新同一状态变量的转换矩阵T(i)差异变大, 不像图8(d)中两者差异很小, 由此可知, 随着同化强度的增大, CL和LA的集合转换矩阵差异逐渐变大。
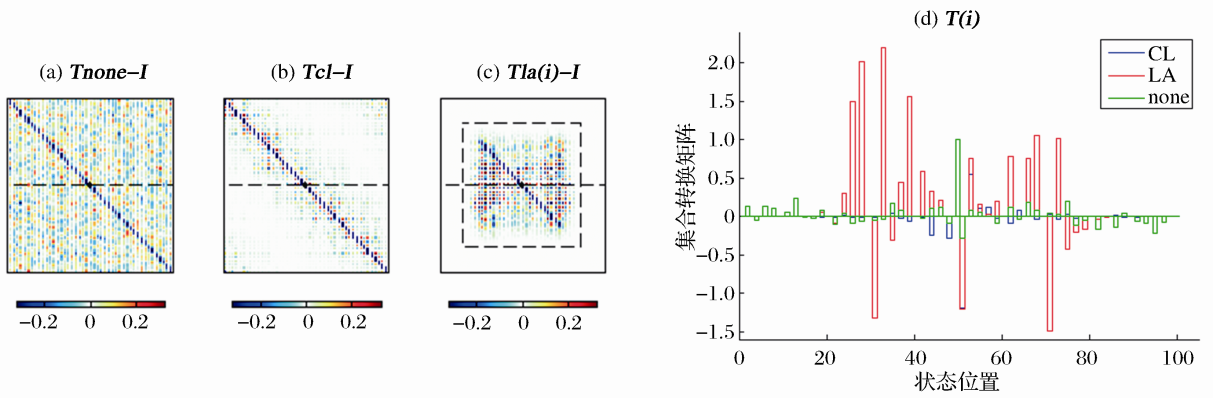 | 图10 集合转换矩阵T对比图(Robs_variance= 10-4)色度条表示矩阵元素的取值范围Fig.10 The contrast of the ensemble transformation matrix T(Robs_variance= 10-4)colorbar in figure 10 denotes the values range of matrix elements |
当Robs_variance=10-4时, kσ -1≈ 183.7845, 同化强度对应为 “ 强” 同化。由图10可知:① 在“ 强” 同化下, CL的转换矩阵Tcl仍保持对角性, 但LA的局部转换矩阵Tla(i)在局部区域内丧失了对角性, 与图9(c)比较, Tla(i)变得更加松散, 甚至充满整个局部空间; ② 在“ 强” 同化下, CL和LA更新同一状态变量的转换矩阵T(i)相差很大。
为了更加清晰对比CL和LA对集合转换矩阵T的影响, 这里给出观测误差方差Robs_variance分别为10和10-4条件下, 同化时刻t=5, EnSRF同化更新后的全局T, 如图11所示, 其中:Tcl是CL的集合转换矩阵, Tla是LA的全局集合转换矩阵, I是单位矩阵。图11(a)和图11(b)表示观测误差方差Robs_variance=10, t=5时的全局转换矩阵, 图11(c)和图11(d)表示观测误差方差Robs_variance=10-4, t=5时的全局转换矩阵。
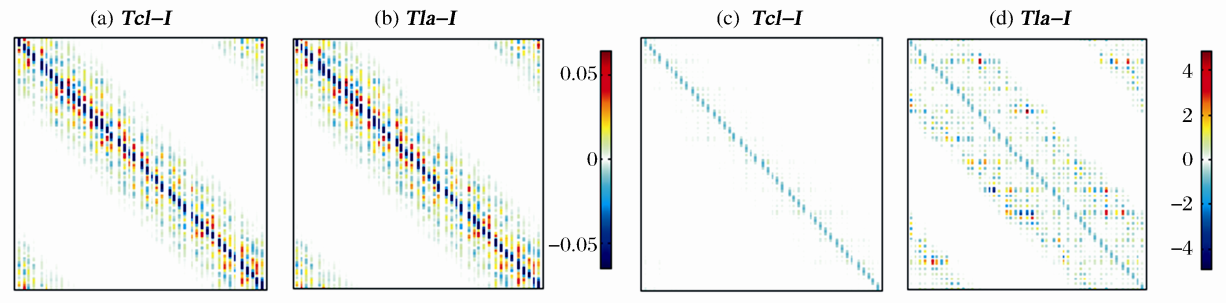 | 图 11 全局集合转换矩阵T对比图(Robs_variance= 10和Robs_variance= 10-4)色度条表示矩阵元素的取值范围Fig.11 The contrast of the Global ensemble transformation matrix T(Robs_variance= 10 andRobs_variance= 10-4)colorbar in figure 11 denotes the values range of matrix elements |
综上可知:① 随着同化强度的增大, CL的集合转换矩阵始终能保持对角性, 而LA的集合转换矩阵会丧失对角性, 因此, CL在更新集合扰动上有较强的鲁棒性; ② 在同化很“ 弱” 时, CL和LA的集合转换矩阵T近似相等, 但随着同化强度的增大, CL和LA的集合转换矩阵差异变大。
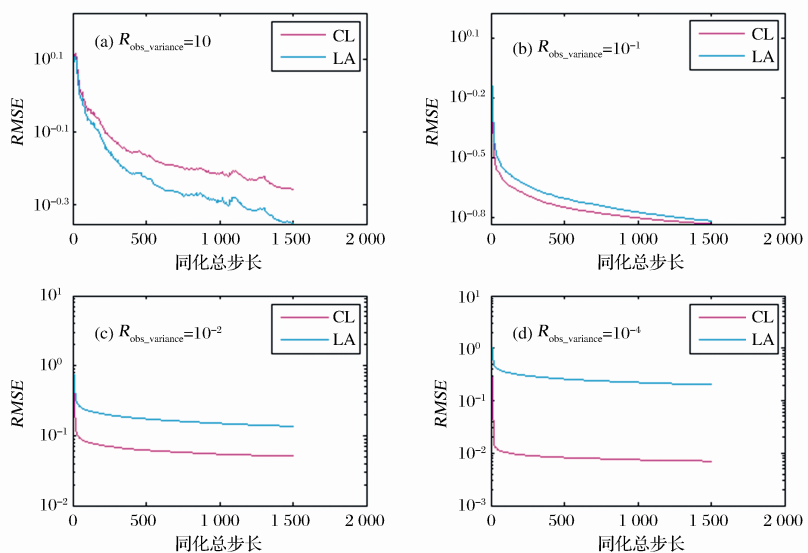
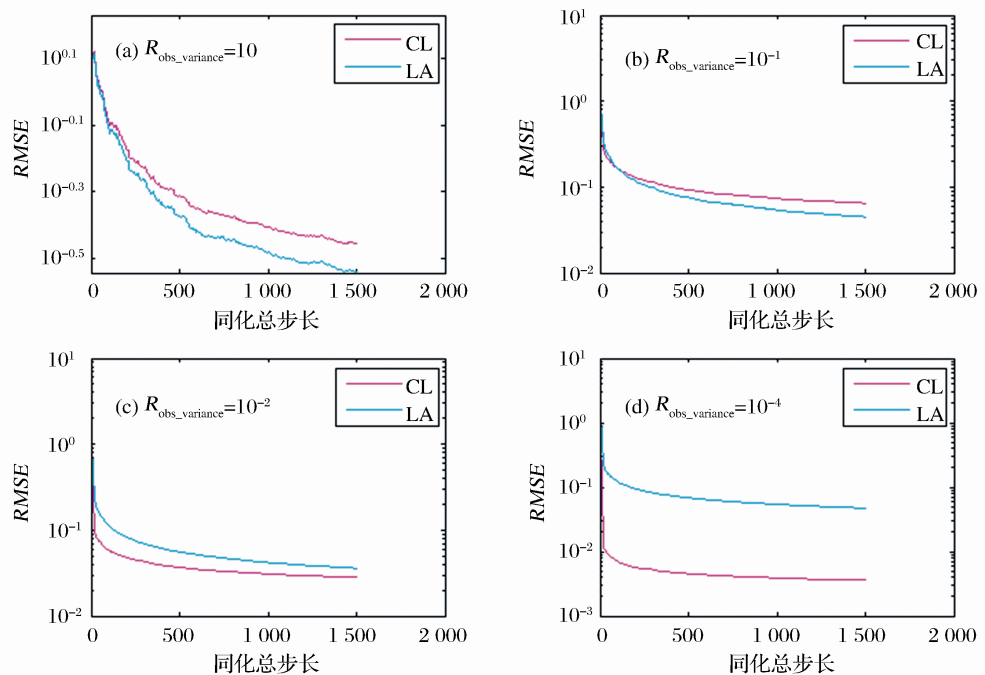
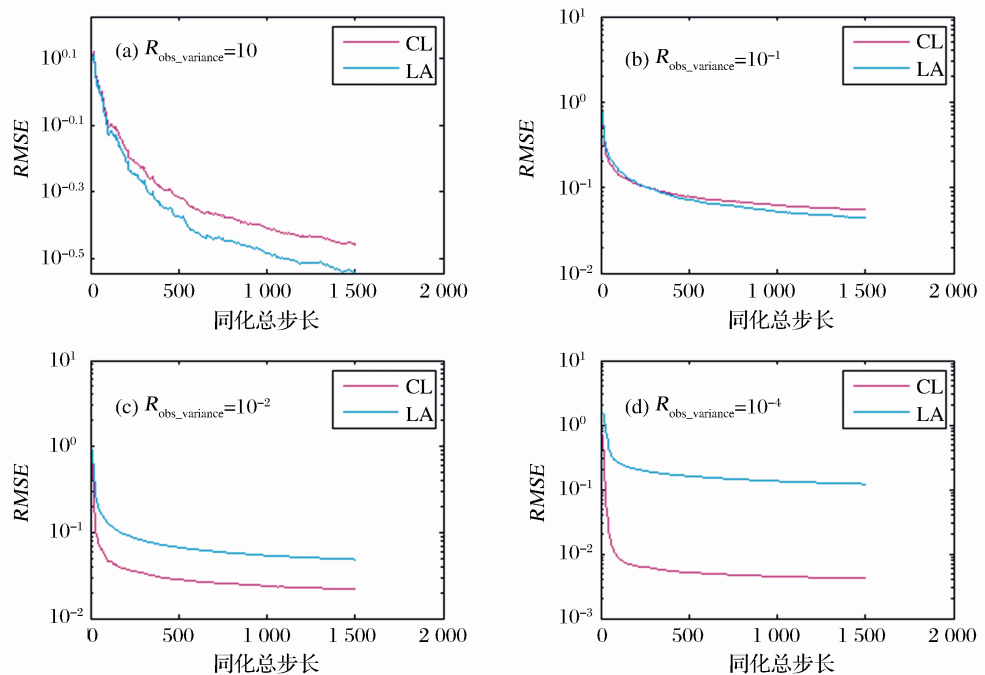
为了研究CL和LA对同化结果的影响, 分别基于EnKF、EnSRF和DEnKF 3种同化方案进行实验, 由于CL不适用于ETKF, 故ETKF在此不作讨论。对上述3种同化方案, 分别考察观测误差方差Robs_variance为10、10-1、10-2和10-4 4种情形, 其中Robs_variance=10时对应于“ 弱” 同化, Robs_variance=10-1对应于“ 中” 同化, Robs_variance=10-2和10-4对应于“ 强” 同化。最终效果图如图12、图13和图14所示, 其中:图12(a)、图13(a)和图14(a)表示观测误差方差Robs_variance为10的同化效果图, 图12(b)、图13(b)和图14(b)表示观测误差方差Robs_variance为10-1的同化效果图, 图12(c)、图13(c)和图14(c)表示观测误差方差Robs_variance为10-2的同化效果图, 图12(d)、图13(d)和图14(d)表示观测误差方差Robs_variance为10-4的同化效果图。
尽管上述同化方案不同, 但始终存在如下结论:① 在“ 弱” 同化下, LA的同化效果比CL的好; ② 在“ 中” 同化下, 两者的同化效果接近; ③ 在“ 强” 同化下, CL的同化效果比LA的好, 原因是随着同化强度的增大, LA的增益矩阵和集合转换矩阵发生了质变, 失去对角性, 而CL的增益矩阵和集合转换矩阵始终能保持对角性, 这也表明CL在更新集合均值和集合扰动上具有较强的鲁棒性。
本文对比分析了2种局地化方法对背景误差协方差矩阵、增益矩阵和集合转换矩阵的影响。此外, 基于EnKF、EnSRF和DEnKF同化方案, 还比较了2种局地化方法对同化结果的影响。实验研究表明:
(1)协方差局地化方法不仅能消除背景误差协方差矩阵中的伪相关, 减少远距离观测数据对待更新状态变量的影响, 而且能增加背景误差协方差矩阵的秩。
(2)相对于CL, LA每次只更新局部区域中心点的集合均值和集合扰动, 其他非中心元素的集合均值和集合扰动并不更新, 即LA为异步更新, CL是同步更新。
(3)在“ 弱” 同化强度下, CL和LA的增益矩阵近似相等, 随着同化强度的增大, 两者的增益差异变大。
(4)在“ 弱” 同化强度下, CL和LA的集合转换矩阵接近, 随着同化强度的增大, 两者的集合转换矩阵差异变大。
(5)随着同化强度的增大, CL的增益矩阵和集合转换矩阵始终能保持对角性, 而LA的增益矩阵和集合转换矩阵会逐渐丧失对角性。同化强度越“ 强” , LA的增益矩阵和集合转换矩阵在空间上越零散, 这表明CL在更新集合均值和集合扰动上具有较强的鲁棒性。
(6)在“ 弱” 同化下, LA的同化效果比CL的同化效果好; 在“ 中” 同化下, CL和LA的同化效果几乎相同; 在“ 强” 同化下, CL的同化效果优于LA, 原因是随着同化强度的增大, LA的增益矩阵和集合转换矩阵发生了质变, 丧失主对角线上的对角性, 而CL的增益矩阵和集合转换矩阵始终能保持对角性, 即CL在更新集合均值和集合扰动上具有较强的鲁棒性。
在大气、海洋、水文和陆面等领域的数据同化应用中, 背景误差协方差的精细分析和估计非常重要, 需要对不同局地化方法进行对比分析和优化选择。通过本文的研究, 我们建议从同化强度、可扩展性和数值计算效率等方面综合考虑局地化方法的选择。特别地, 在同化的强度方面, 如果同化很“ 弱” , LA方法较适合。如果同化很“ 强” , CL方法更具优势。如果同化“ 适中” , 两种方法均可。在可扩展性方面, LA方法允许在集合空间进行分析值的更新, CL方法要求在状态空间进行分析值的更新, 这样造成CL方法不适用于大尺度同化系统。在计算效率方面, CL方法在中尺度同化系统的计算效率方面具有优势, LA方法更适用于并行计算, 这对于大尺度同化系统是一个最佳的选择。目前, 我们通常使用区域分解方式来完成大规模网格的模式数值预报和背景误差协方差的并行计算。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|